本文主要是介绍FANUC机器人如何清除示教器右上角的白色感叹号?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
FANUC机器人如何清除示教器右上角的白色感叹号?

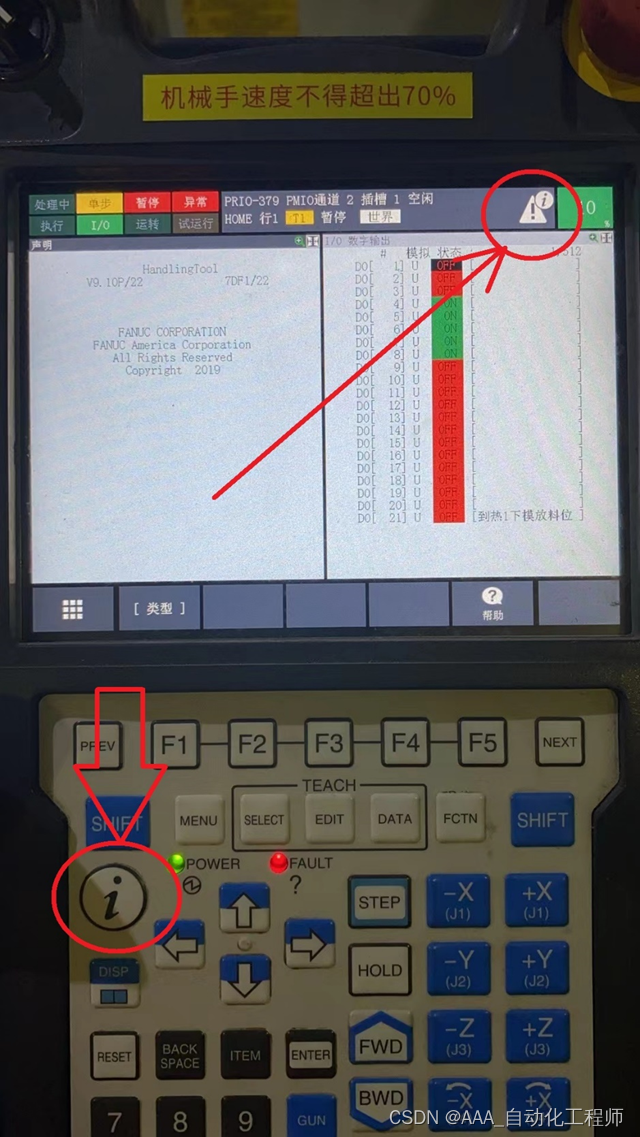
| 如下图所示,示教器上显示白色的感叹号,如何清除呢? |
| 具体可参考以下步骤: |
按下示教器上白色的“i”键,如下图所示,
如下图所示,按下i键后进入该画面,点击下方的“清除所有”,

如下图所示,在弹出的画面上选择其中一个(一天或一周),
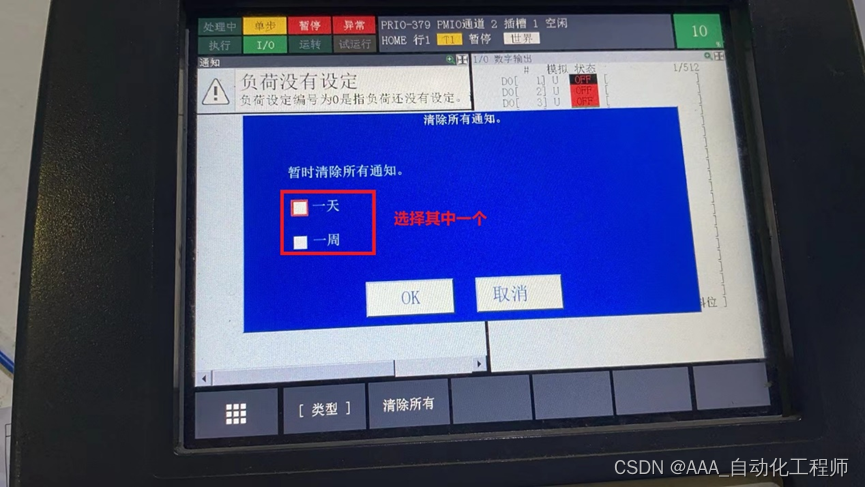
如下图所示,这里以一周为例,选择后,将光标移至OK,按enter确认,

如下图所示,此时可以看到上方的提示通知已经消失,而且右上角的白色感叹号也消失了。

这篇关于FANUC机器人如何清除示教器右上角的白色感叹号?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







