本文主要是介绍FANUC机器人镜像恢复和刷通讯包,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、先镜像备份好机器人系统程序文件
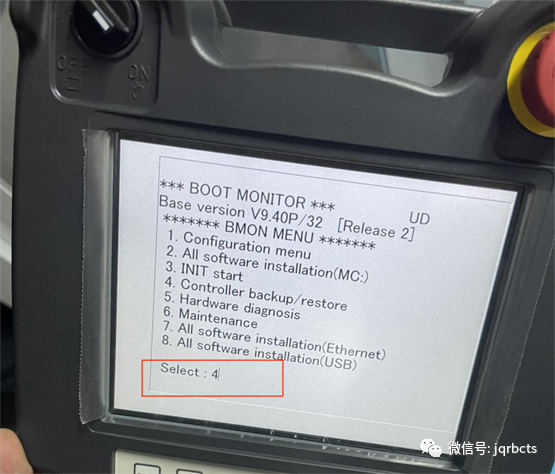
2、F1和 F5镜像备份后关机重启进入控制模式导入已配置好的镜像Modbus程序文件(选择第4个选项)
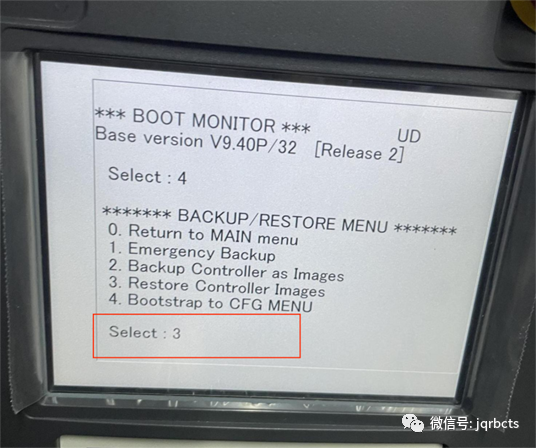
3、再进入控制柜写入(选择第3个)
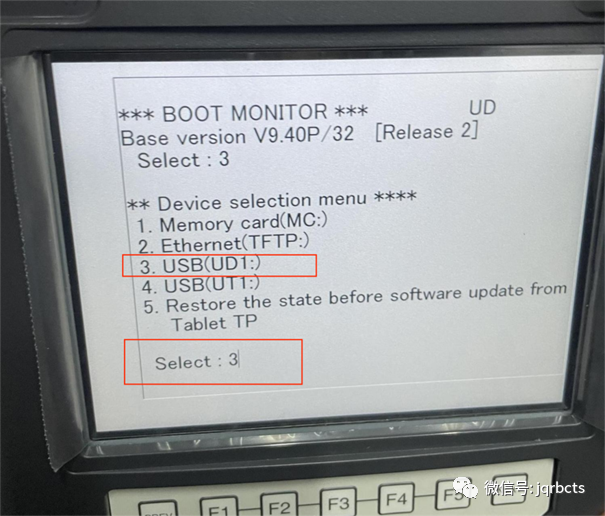
3、再进入UD1(选择第3个)
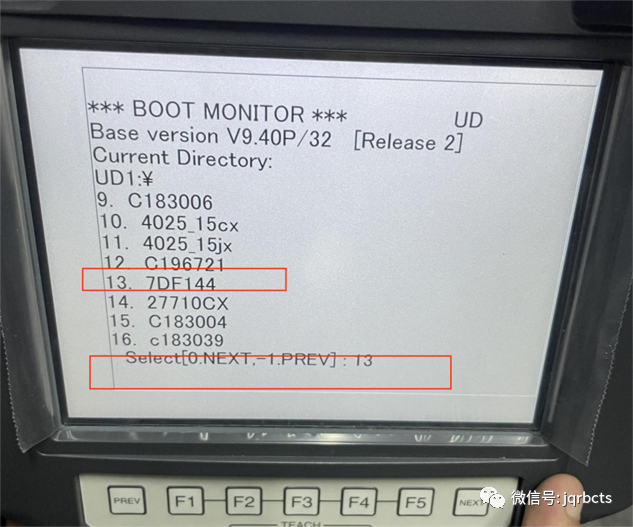
4、选择要刷入的文件
5、再选择第一个进入
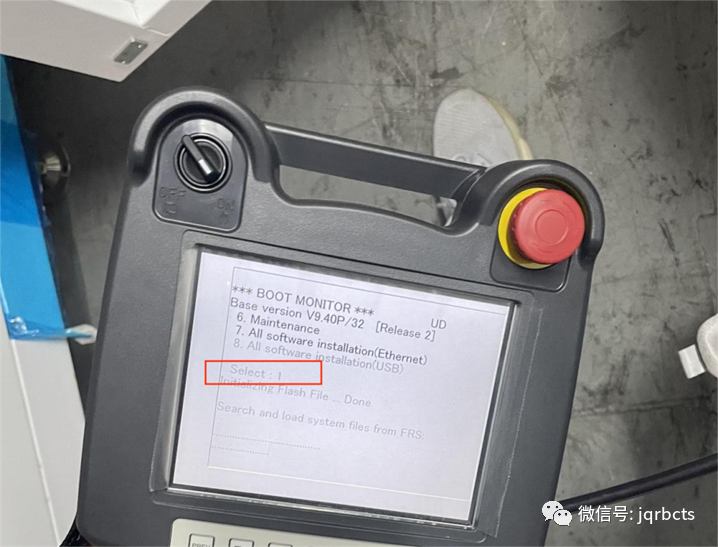
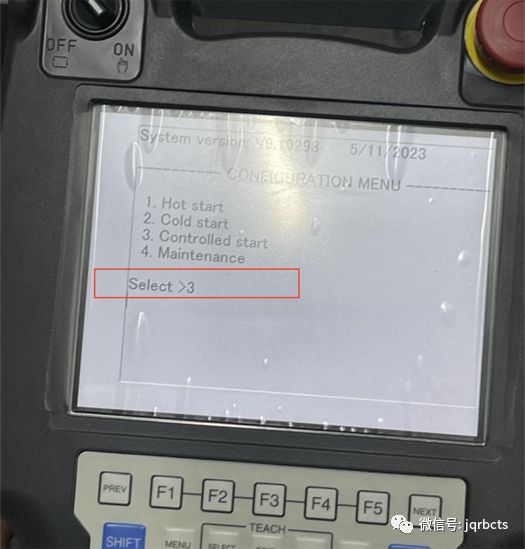
6、选择第3个控制器启动
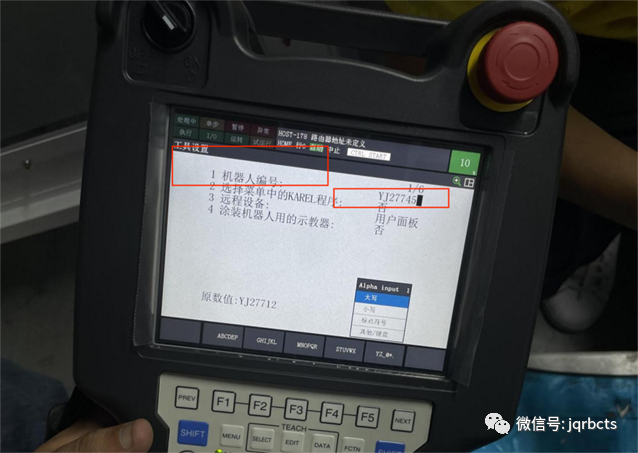
7、冷启动完之后进入工具设置编辑机器人编号
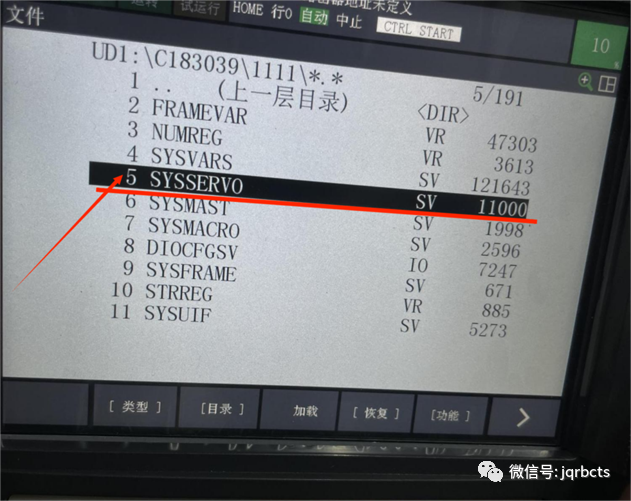
8、进入UD1单独加载一次变量SYSSERVO伺服数据 SYSMAST 零点变量
9、最后把原来镜像备份好的机器人系统程序文件再导入进机台,选择第6个恢复以上所有
这篇关于FANUC机器人镜像恢复和刷通讯包的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






