本文主要是介绍FANUC机器人SOCKET断开KAREL程序编写,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、添加一个.KL文件创建编辑断开指令
添加一个KL文件用来创建karel程序中socket断开指令

二、断开连接程序karel代码

PROGRAM SOC_DIS
%COMMENT = 'SOCKET断开'
%INCLUDE klevccdf
VAR
str_input,str_val : STRING[20]
status,data_type,int_val : INTEGER
rel_val : REALBEGINGET_TPE_PRM(1,data_type,int_val,rel_val,str_val,status)IF (data_type<>3) THENABORTENDIFstr_input = str_val+':'MSG_DISCO(str_input,status)DOUT[10] = OFFEND SOC_DIS三、SOCKET通讯测试
创建fanuc机器人TP程序做socket通讯通断测试
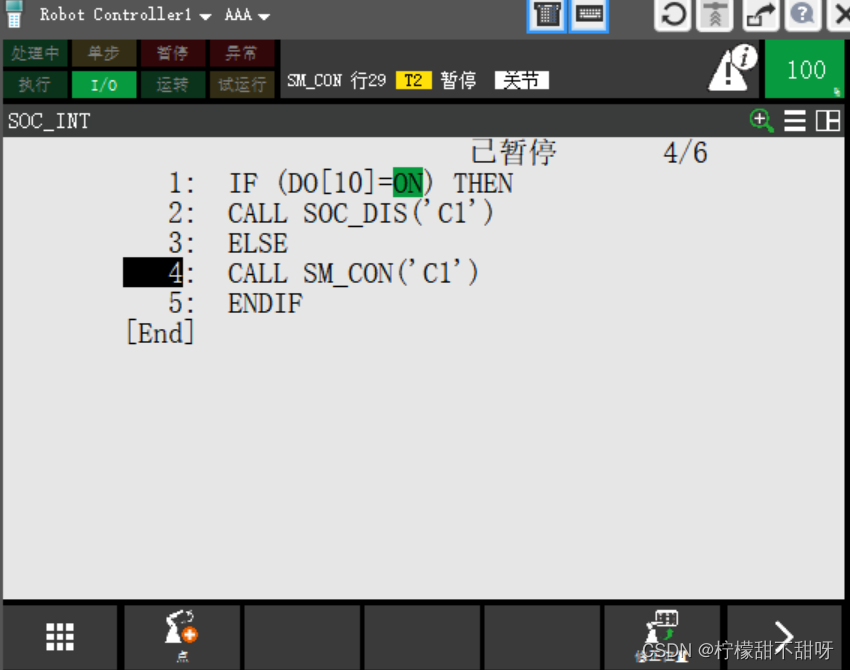
这篇关于FANUC机器人SOCKET断开KAREL程序编写的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




