karel专题
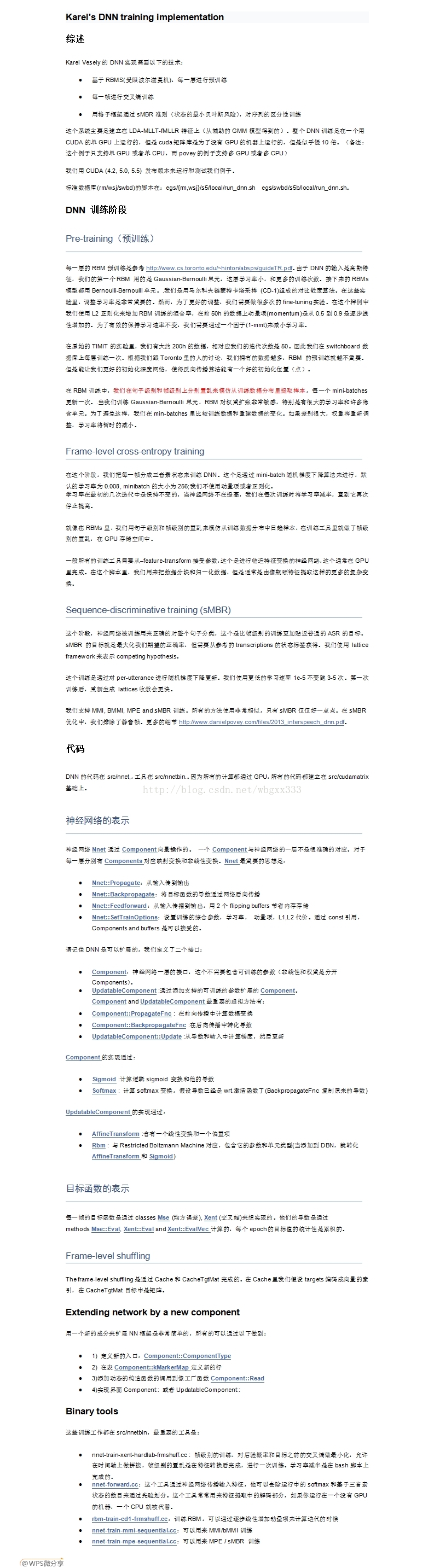
kaldi中深度学习的主要实现---------Karel's DNN training implementation
说明:本文是翻译kaldi主页里的Karel的深度学习模型的实现。 2014.5.3改。 如果您有任何问题,欢迎留言讨论,谢谢……
FANUC机器人SOCKET断开KAREL程序编写
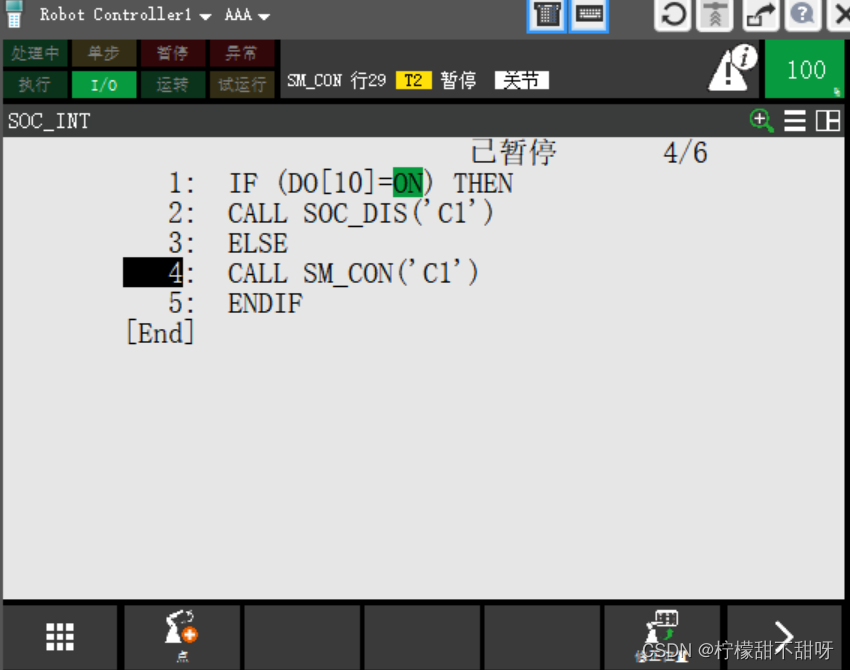
一、添加一个.KL文件创建编辑断开指令 添加一个KL文件用来创建karel程序中socket断开指令 二、断开连接程序karel代码 PROGRAM SOC_DIS%COMMENT = 'SOCKET断开'%INCLUDE klevccdfVARstr_input,str_val : STRING[20]status,data_type,int_val : INTEGER

FANUC机器人KAREL语言程序结构(入门)
一、karel语言程序结构 FANUC机器人keral语言编程结构如下图所示: Keral指令对应的基础用法如下所示: 二、创建一个简单的写屏程序 依照对应的karel语法写写入下列程序 运行对应的程序进行测试:
发那科Karel-字符串解析
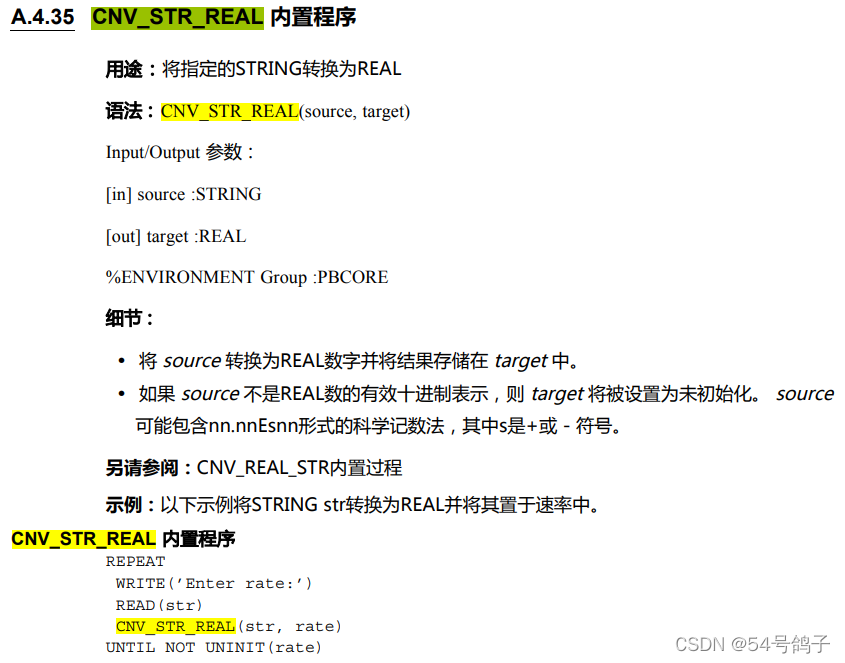
一、前言 App(应用程序)和Fanuc机械臂进行Socket通讯,通过将“功能码”和“点位坐标”转换成字符串发送到服务端/客户端,并且也需要App和Fanuc机械臂Karel程序中能将接收到字符串解析出“功能码”和“点位坐标”。本文章主要是介绍在Fanuc的Karel程序中,从一串字符串中如何解析所需要的内容。 二、通讯协议 起始符功能码间隔符 X的坐标 (mm) 间隔符 Y的坐标 (mm