本文主要是介绍Unity13 物理关节、物理材质、射线检测、粒子系统、线段渲染器、拖尾,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
物理关节
比如门和墙都是物理体,他们之间实际没有连接,但是又是被一个东西连接起来的。这个东西就是物理关节,弹簧也是一个物理关节。
Hinge Joint铰链关节,相当与一个铰链拴住物体。
Spring Joint弹簧,需要连接一个刚体,两个物体会用弹簧连接起来。
Fixed Joint固定关节组件,相当于胶水把两物体沾了起来。
物理材质
两个物体默认是固定的摩擦力,可以新建一个物理材质推拽到物体动摩擦、静摩擦、弹力等。
可以给不同的地面不同的物理材质,例如冰面、地面等。
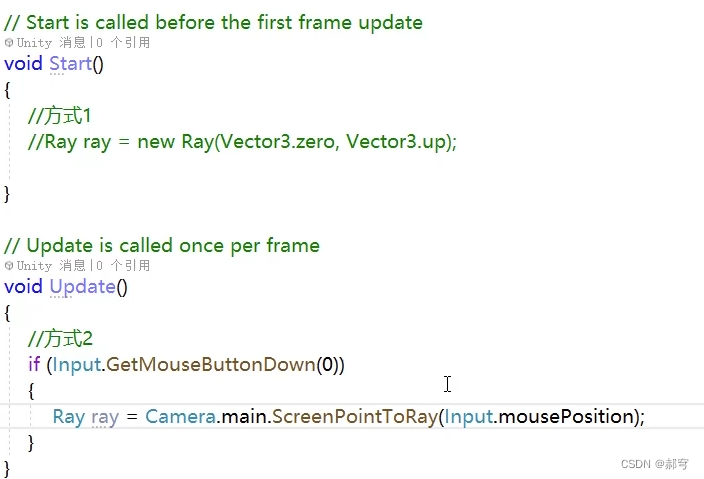
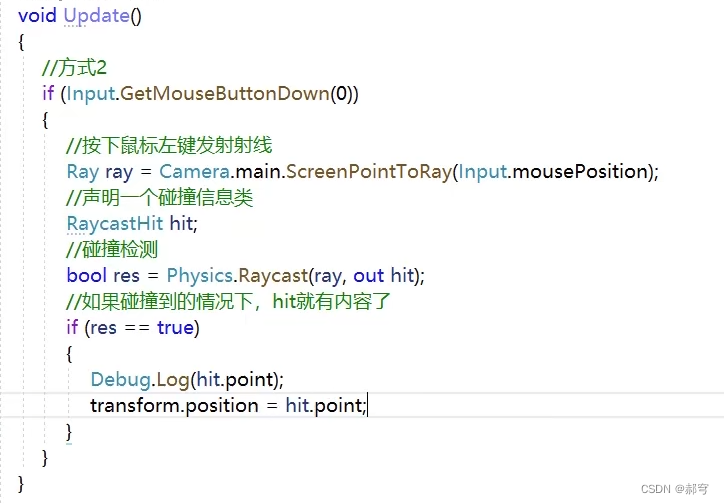
射线检测
希望点击某一处,物体到达该处。
射线创建方式

粒子系统
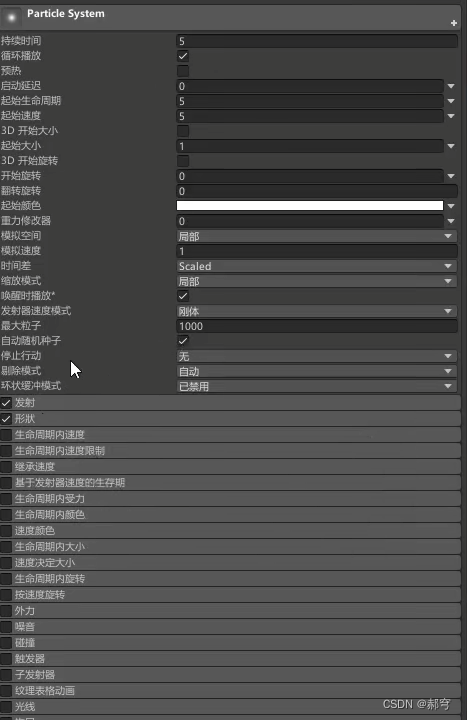
通过粒子系统可以制作火焰等特效。
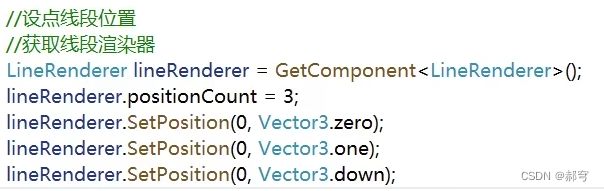
线段渲染器
Line Renderer
拖尾
Trail Renderer

这篇关于Unity13 物理关节、物理材质、射线检测、粒子系统、线段渲染器、拖尾的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





