关节专题

Unity --- 各种关节(Joints)来模拟物体之间的连接
目录 一:2D关节 一:1 固定关节 (Fixed Joint 2D) 功能: 适用场景: 1. 平台游戏中的固定平台: 2. 拼图游戏中的固定部件: 3. 建筑游戏中的固定结构: 一:2 铰链关节 (Hinge Joint 2D) 功能: 适用场景: 一:3 弹簧关节 (Spring Joint 2D) 功能: 适用场景: 1. 弹性绳索或弹簧: 2. 弹性

unity面试:什么叫做链条关节?
链条关节(Chain Joint)在Unity中常用来创建一系列连接的物体,模拟真实世界中的链条或绳子等物体的运动和交互。这种类型的关节允许多个物体通过关节连接在一起,从而形成链条结构,从而可以创建更复杂的物理行为。 在Unity中,可以使用Configurable Joint、Hinge Joint 或 Spring Joint 等关节类型来实现链条关节的效果。以下是关于链条关节的一些关键点:
Robot Operating System——多个自由度的关节状态信息
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::MultiDOFJointState 是 ROS (Robot Operating System) 中的一个消息类型,用于表示具有多个自由度(Degrees of Freedom, DOF)的关节状态。它通常用于传输和处理机器人中复杂关节的状态信息。 应用场景 机器人控制 多自由度机械臂:在多自由度机械臂中

【传知代码】无监督动画中关节动画的运动表示-论文复现
文章目录 概述动画技术的演进原理介绍核心逻辑环境配置/部署方式小结 本文涉及的源码可从无监督动画中关节动画的运动表示该文章下方附件获取 概述 该文探讨了动画在教育和娱乐中的作用,以及通过数据驱动方法简化动画制作的尝试。近期研究通过无监督运动转移减少对真实数据的依赖,取得一定进展,但仍面临关节和非刚性对象运动的表示、运动序列动画化及背景运动处理等问题。为解决这些挑战,文章提出

GDPU unity游戏开发 碰撞体与关节
让你设计的角色跑起来吧,可以是动画,也可以是碰撞器的运动。 运动小车 找到小车素材,导入到层级面板。然后可以新建一个地面让小车在上面运动,新建一个方块当障碍物。 摆放好后,要加组件。记住,在unity中运动的是碰撞体组件,而不是造的模型。给车身body加boxcollider,给四个轮子都加上wheelcollider。 设置好一些参数,给小车加刚体组件。记住,unit


【路径规划】基于六次多项式的多关节机器人避障路径规划
最近迷上了机械臂避障轨迹规划,因为之前一直做的都是无障碍物轨迹规划,所以这次想试一下有障碍物的,把避障算法用在我的SimMechanics机械臂上,看看效果咋样。以下定义不区分路径规划和轨迹规划。 by the way,本文实现的是全局静态避障,而非局部动态避障 : ) 0. 任务目标 实现六关节机器人任务空间避障轨迹规划。 1. 思路分析 本人之前尝试过使用采样算法
关节驱动器 CANFD 通信协议
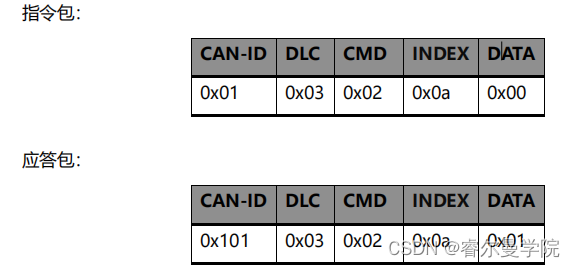
前言 睿尔曼关节采用了问答方式进行通信,控制器发出指令包,模块返回应答包。一个CAN 总线网络中允许有多个模块,所以每个模块都分配有一个 ID 号。控制器发出的控制指令中包含 ID 信息,只有匹配上 ID 号的模块才能完整接收这条指令,并返回应答信息。所有的查询、控制和参数修改指令均通过对一个储存于模块主控芯片内部的内存控制表的读写操作完成。内存控制表的每一个地址存储两个字节,数据
Box2d)box2dweb之关节joint(连接器)
box2dweb非常重要的一个概念,关节(joint)也有叫连接器的,总之是一个意思。下面是关节详细的类库说明: BOX2D.Dynamics.Joints>>>动态关节包; b2DistanceJoint 距离连接 b2DistanceJointDef 距离连接定义. b2GearJoint 齿轮链接. b2GearJointDef 齿轮连接定义. b2Joint 连接基类. b2Joi
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 6 文章目录 前言一、创建controller相关二、逻辑分析RRBotModularJoint类解析ros2_control.xacro解析 三、测试运行测试forward_position_controller 总结 前言 本篇文章在上篇文章的基础上主要讲解双轴机器人驱动怎么编写双轴机器各
Unity 关节:铰链、弹簧、固定、物理材质:摩檫力、 特效:拖尾、
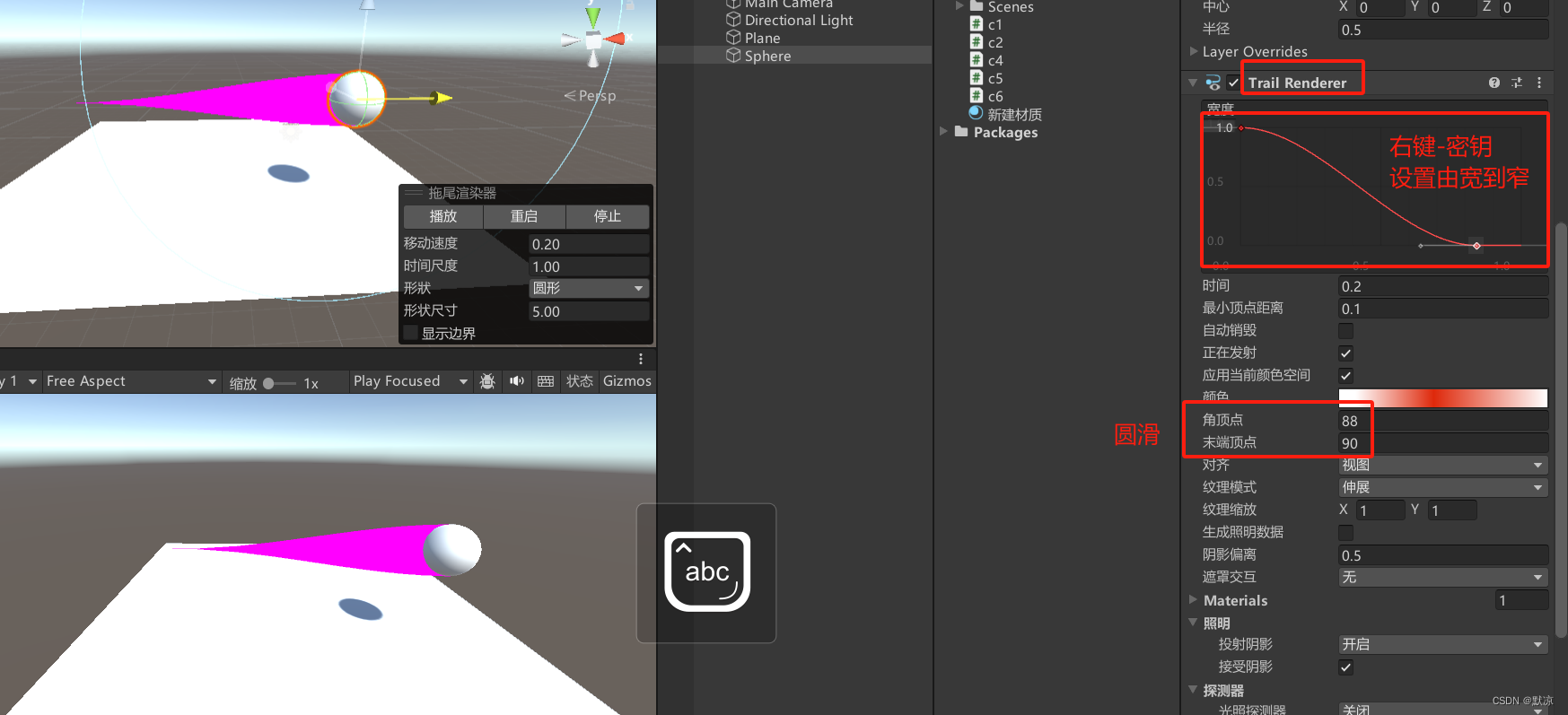
组件-物理-关节:铰链(类似门轴) 自动动作、多少力可以将其断开、 弹簧可以连接另一个刚体(拖动即可) 固定一般是等待一个断裂力,造成四分五裂的效果。 物理材质 设置摩檫力,则可以创造冰面的物理效果。 特性-拖尾 添加组件Trail

【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 5
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 5 文章目录 前言一、创建controller相关二、测试运行测试forward_position_controller 总结 前言 本篇文章在上篇文章的基础上主要讲解双轴机器人驱动怎么编写机器人完整包含所有方向的外部/内部(扭矩、压力)传感器数据反馈1,如何在硬件接口中集成传感器。 对于H
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 4
【ros2 control 机器人驱动开发】双关节多控制器机器人学习-example 4 文章目录 前言一、创建controller相关二、测试运行测试forward_position_controller 总结 前言 本篇文章在上篇文章的基础上主要讲解双轴机器人驱动怎么编写机器人外部/内部(扭矩、压力)传感器数据反馈1,如何在硬件接口中集成传感器。 对于Hardware I
Unity(第十八部)物理力学,碰撞,触发、关节和材质
1、重力 刚体组件 英文中文描述RigidBody刚体组件physics->rigidbody ,刚体组件使一个物体有了质量,重力等。,use gravity 勾选后,物体才会受到重力,会自动下落,取消勾选就不会。,,is kinematic 表示运动学刚体,此时物体质量为0,就不会受重力的影响。 1. 质量2. 阻力3. 角阻力4. 使用重力(取消后,只是不受重力影响,阻力等还是受影响的
基于单片机的多关节机械臂抓取系统
摘 要:在农业发展过程中,果实采摘是极度耗费人力的工作。为了减少农业生产过程中的人工成本,将人工智能应用于农业领域将是一种有效手段。基于单片机的控制设计出一款智能抓取系统,拥有六关节高自由度机械臂;爪子采用柔性材料,在加强爪子和果实贴合度的情况下减少对果实的损伤程度;采用视觉系统进行图像处理,并采集三位坐标;采用避障系统控制小车前进;通过增加蓝牙模块让人工参与变得更加简便。本文设计的基于单片机的多

unity物理引擎--Join(关节,连接器)
Joint链接器的功能:字面意思连接接两个物体 下面介绍几个常用的Joint: 1.Higne Joint(铰链关节,合叶关节) 铰链关节由两个刚体组成,约束它们像连在一个铰链上一样运动,适用于开关门,典型的链子、钟摆等。 介绍一下功能属性: Connected Bod

Unity3D-----物理引擎(ADV--COMPONENT,关节属性查询)
关节 关节类型1、 铰链关节(Hinge Joint)2、 固定关节3、弹性关节(Spring Joint)4、角色关节(2020年5月21日暂未了解)5、可配置关节(2020年5月21日暂未了解)6、给刚体添加力 关节类型 1、 铰链关节(Hinge Joint) 铰链关节将两个刚体(Rigidbody)组合在一起,从而将其约束为如同通过铰链链接一样进行移动。它十分适合门,

【深度学习:多关节嵌入模型】 Meta 解释的 ImageBind 多关节嵌入模型
【深度学习:多关节嵌入模型】 Meta 解释的 ImageBind 多关节嵌入模型 Meta 发布开源人工智能工具的历史分段任何模型DINOv2 什么是多模态学习?什么是嵌入?什么是 ImageBind?集成在 ImageBind 中的模式图像绑定架构特定模式编码器跨模态注意力模块联合嵌入ImageBind 训练数据ImageBind 性能ImageBind 是开源的吗? 利用 Imag
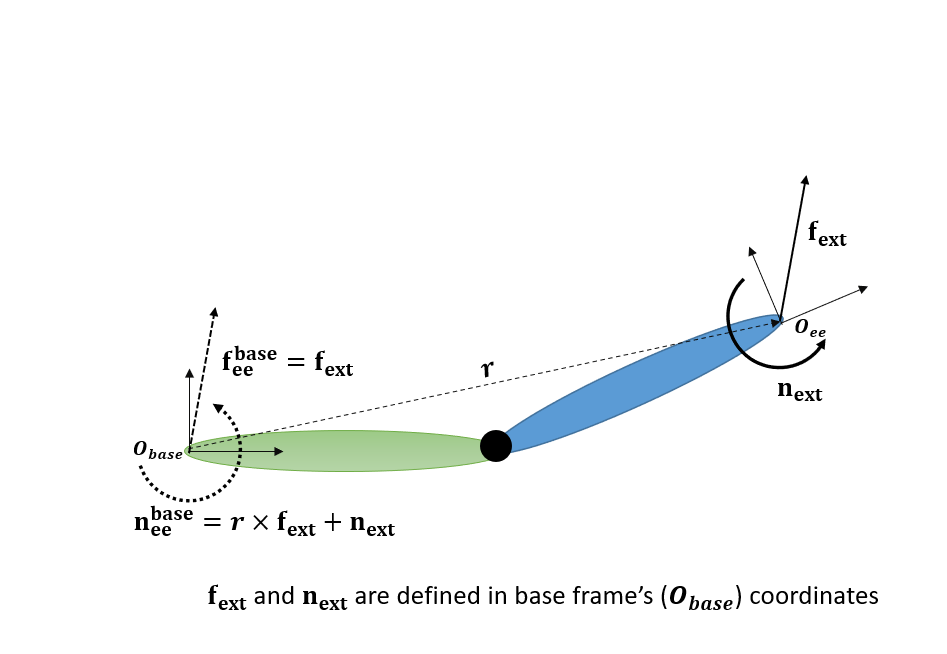
MATLAB - 计算机械臂关节扭矩以平衡末端力和力矩
系列文章目录 前言 产生力矩以平衡作用在平面机器人末端执行器体上的端点力。要使用各种方法计算关节力矩,请使用刚体树机器人模型的几何雅各比(geometricJacobian)和反动力学(inverseDynamics)对象函数。 一、初始化机器人 双关节刚体树机器人是一个二维平面机器人。关节配置以列向量形式输出。 twoJointRobot = twoJointRigid
Unity之铰链关节和弹簧组件
《今天闪电侠他回来了,这一次他要拿回属于他的一切》 目录 📕一、铰链关节组件HingeJoint 1. 实例 2. 铰链关节的坐标属性 3.铰链关节的马达属性Motor 📕二、弹簧组件 📕三、杂谈 一、铰链关节组件HingeJoint 1. 实例 说到关节大家会想到我们身体的关节,还有日常生活中的“关节”比如说:门,这次向大家介绍在Unity中是怎
MATLAB - 机器人关节空间运动模型
系列文章目录 前言 关节空间运动模型描述了在闭环关节空间位置控制下机械手的运动,在关节空间运动模型(jointSpaceMotionModel)对象和关节空间运动模型块中使用。 机器人机械手是典型的位置控制设备。要进行关节空间控制,需要指定关节角度或位置向量 q,以跟踪参考配置 q 参考 . 为此,您可以对机器人关节进行闭环控制,并使用运动模型模拟机器人在此控制下的行为。 要使
机械臂 关节电机选型计算
电机的关键参数 电机的三个关键参数:额定功率,额定扭矩,额定转速。这个大家都比较清楚,对应关系公式,可以直接搜索出来。这里还需要特别声明一点,就是电机的转速-扭矩曲线。这里的前提是对应不同的额定电压的。如果电机可以匹配多种电压,那就对应多种不同的转速-扭矩曲线。这些资料,可以跟对应的电机供应商获取。 电机的扭矩类型 电机的扭矩计算,在网上也看了许多视频和文章。都是根据不同的行业和角色来解说对

机器人关节电机PWM
脉冲宽度调制(Pulse width modulation,PWM)技术。一种模拟控制方式 机器人关节电机的控制通常使用PWM(脉冲宽度调制)技术。PWM是一种用于控制电子设备的技术,通过控制高电平和低电平之间的时间比例,实现对电子设备的控制。在机器人关节电机中,PWM信号可以控制电机的转速和方向。 具体地说,PWM信号是由一系列脉冲组成的,每个脉冲的宽度代表了高电平的时间,而脉

“机器狗”关节电机如何选?
随着越来越多的公司采用机器人技术,机器人的概念已经是非常地广泛,让我们来探讨一下四足机器狗关节用轴向磁通电机的主要优势有哪些。 通常机器人常用的电机包含这三种类型: 一、直流电机 输出或输入为直流电能的旋转电机,称为直流电机。它是能实现直流电能和机械能互相转换的电机,当它作电动机运行时是直流电动机,将电能转换为机械能,作发电机运行时是直流发电机,将机械能转换为电能; 二

Unity 挖掘机关节联动
对某公司进行面试,并且让我做了一道程序题,刚开始觉得挺简单,后来做的时候发现,物理效果实现的还是不是很完美,自己码代码没有一个很好的思路,因为主要的就是一个联动性。后来参考了某位大神的帖子,终于实现了效果,效果看图哈。 其题目内容:(设备操作控制逻辑实现) 要求:根据提供资料实现挖掘机的挖掘动作操作,输入方式为键盘映射。 内容包含: (1)可操作挖掘机进行驾驶舱左右回转操作。映射键盘