立体匹配专题

基于opencv实现双目立体匹配点云距离
双目相机或两个单目相机。 一、相机标定 MATLAB软件,打开双目标定app。 点击add images,弹出加载图像的窗口,分别导入左图和右图,设置黑白格长度(标定板的长度一般为20)。 点击确定,弹出加载好的图像。 在菜单栏勾选2 Coefficients(鱼眼相机勾选3 Coefficients)、Tangential Distinction,点击Calibrate,显示

立体匹配论文阅读(2)-- Stereo Matching with Color-Weighted Correlation, Hierarchical Belief Propagation...
《 Stereo Matching with Color-Weighted Correlation, Hierarchical Belief Propagation, and Occlusion Handling》 题目翻译:使用颜色加权的相关性和遮挡区处理的结构性置信度传播的立体匹配算法 其提出的算法主要流程为以下三个步骤,文章中也分别给出了相对应的框图: 1.初始视差的得到 2.像

立体匹配论文阅读(1)-Segment-based stereo matching using belief propagation and a self-adapting dissimilarity
《Segment-based stereo matching using belief propagation and a self-adapting dissimilarity measure》 将题目翻译过来是:使用置信度传播和自适应差异测度的基于图像分割的立体匹配算法 其提出的算法主要流程为: 1.准备待匹配图像对 2.使用mean-shift方法,根绝颜色和亮度的统一性,将参考图像

【立体匹配论文阅读】【二】CREStereo
Practical Stereo Matching via Cascaded Recurrent Network with Adaptive Correlation 基于自适应相关级联递归网络的实用立体匹配 说明:本博客可以理解为对论文的翻译和总结整理,并且会在其中添加一些在其他博客搜到的理解,PPT可以在文末下载。PPT是本人创作,希望可以帮到大家。 本文是旷视研究院(Megvii Res
密集立体匹配20年论文整理
https://blog.csdn.net/xuyuhua1985/article/details/26283389 1994 Kanade T, Okutomi M. A stereo matching algorithm with an adaptive window: Theory and experiment[J]. TPAMI, 1994, 16(9): 920-932. 被
【理论恒叨】【立体匹配系列】经典SGM:(4)视差计算、视差优化
理论恒叨系列 【理论恒叨】【立体匹配系列】经典SGM:(1)匹配代价计算之互信息(MI) 【理论恒叨】【立体匹配系列】经典SGM:(2)匹配代价计算之Census变换 【理论恒叨】【立体匹配系列】经典SGM:(3)代价聚合(Cost Aggregation) 【理论恒叨】【立体匹配系列】经典SGM:(4)视差计算、视差优化 【理论恒叨】【立体匹配系列】经典SGM:(4)视
【理论恒叨】【立体匹配系列】经典PatchMatch: (2)基于PatchMatch的视差估计
理论恒叨系列 【理论恒叨】【立体匹配系列】经典PatchMatch: (1)Slanted support windows倾斜支持窗模型 【理论恒叨】【立体匹配系列】经典PatchMatch: (2)基于PatchMatch的视差估计 【理论恒叨】【立体匹配系列】经典PatchMatch: (3)后处理(一致性检查与视差填充) PatchMatchStereo1是Michael
立体匹配算法(Stereo correspondence)
SGM(Semi-Global Matching)原理: SGM的原理在wiki百科和matlab官网上有比较详细的解释: wiki matlab 如果想完全了解原理还是建议看原论文 paper(我就不看了,懒癌犯了。) 优质论文解读和代码实现 一位大神自己用c++实现的SGM算法github 先介绍两个重要的参数: 注:这一部分参考的是matlab的解释,后面的部分是参考的opencv的实现,

双目相机立体匹配基础
双目匹配就是用左相机和右相机去拍摄同一个点,目的是找到三维世界的同一个点,也就是在左相机和右相机中的成像点之间的像素差(视差),根据视差去求解深度,那么找到左相机点到右相机的同一个对应点这个过程就是双目相机立体匹配。 一、双目视觉流程 双目视觉流程是通过双目相机的左相机和右相机拍摄标定板的图片制作标定(离线),在线拍摄后进行矫正。 满足两个相机是平行的要求,做匹配点也能满足从一维在同一行去搜
使用opencv做双目测距(相机标定+立体匹配+测距)
最近在做双目测距,觉得有必要记录点东西,所以我的第一篇博客就这么诞生啦~ 双目测距属于立体视觉这一块,我觉得应该有很多人踩过这个坑了,但网上的资料依旧是云里雾里的,要么是理论讲一大堆,最后发现还不知道怎么做,要么就是直接代码一贴,让你懵逼。 所以今天我想做的,是尽量给大家一个明确的阐述,并且能够上手做出来。 一、 标定 首先我们要对摄像头做标定,具体的公式推导在learning opencv
UI演示双视图立体匹配与重建
相关文章: PyQt5和Qt designer的详细安装教程:https://blog.csdn.net/qq_43811536/article/details/135185233?spm=1001.2014.3001.5501Qt designer界面和所有组件功能的详细介绍:https://blog.csdn.net/qq_43811536/article/details/135186862
立体匹配算法(Stereo correspondence)
SGM(Semi-Global Matching)原理: SGM的原理在wiki百科和matlab官网上有比较详细的解释: wiki matlab 如果想完全了解原理还是建议看原论文 paper(我就不看了,懒癌犯了。) 优质论文解读和代码实现 一位大神自己用c++实现的SGM算法github 先介绍两个重要的参数: 注:这一部分参考的是matlab的解释,后面的部分是参考的opencv的实现,

计算机视觉与深度学习 | 改进的SIFT立体匹配算法
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 改进的SIFT立

DSM: Domain-invariant Stereo Matching Networks 域不变的立体匹配网络
DSM: Domain-invariant Stereo Matching Networks 域不变的立体匹配网络 作者‖ flow 编辑‖ 3D视觉开发者社区 3D开发者社区链接:https://mp.weixin.qq.com/s/qNmnGVSAuQU7KusI630-og 导语: 本文是由来自牛津大学、百度研究院以及香港中文大学团队发表的论文,该团队提出了域不变的立体匹配网络方法,

立体匹配十大概念综述 .
http://blog.csdn.net/david__jiang/article/details/6707613 一、概念 立体匹配算法主要是通过建立一个能量代价函数,通过此能量代价函数最小化来估计像素点视差值。立体匹配算法的实质就是一个最优化求解问题,通过建立合理的能量函数,增加一些约束,采用最优化理论的方法进行方程求解,这也是所有的病态问题求解方法。 二、主要立体
【理论恒叨】【立体匹配系列】经典SGM:(4)视差计算、视差优化
理论恒叨系列 【理论恒叨】【立体匹配系列】经典SGM:(1)匹配代价计算之互信息(MI) 【理论恒叨】【立体匹配系列】经典SGM:(2)匹配代价计算之Census变换 【理论恒叨】【立体匹配系列】经典SGM:(3)代价聚合(Cost Aggregation) 【理论恒叨】【立体匹配系列】经典SGM:(4)视差计算、视差优化 【理论恒叨】【立体匹配系列】经典SGM:(4)视
【理论恒叨】【立体匹配系列】经典SGM:(3)代价聚合(Cost Aggregation)
理论恒叨系列 【理论恒叨】【立体匹配系列】经典SGM:(1)匹配代价计算之互信息(MI) 【理论恒叨】【立体匹配系列】经典SGM:(2)匹配代价计算之Census变换 【理论恒叨】【立体匹配系列】经典SGM:(3)代价聚合(Cost Aggregation) 【理论恒叨】【立体匹配系列】经典SGM:(4)视差计算、视差优化 【理论恒叨】【立体匹配系列】经典SGM:(3)代
【理论恒叨】【立体匹配系列】经典SGM:(2)匹配代价计算之Census变换
理论恒叨系列 【理论恒叨】【立体匹配系列】经典SGM:(1)匹配代价计算之互信息(MI) 【理论恒叨】【立体匹配系列】经典SGM:(2)匹配代价计算之Census变换 【理论恒叨】【立体匹配系列】经典SGM:(3)代价聚合(Cost Aggregation) 【理论恒叨】【立体匹配系列】经典SGM:(4)视差计算、视差优化 【理论恒叨】【立体匹配系列】经典SGM:(2)匹

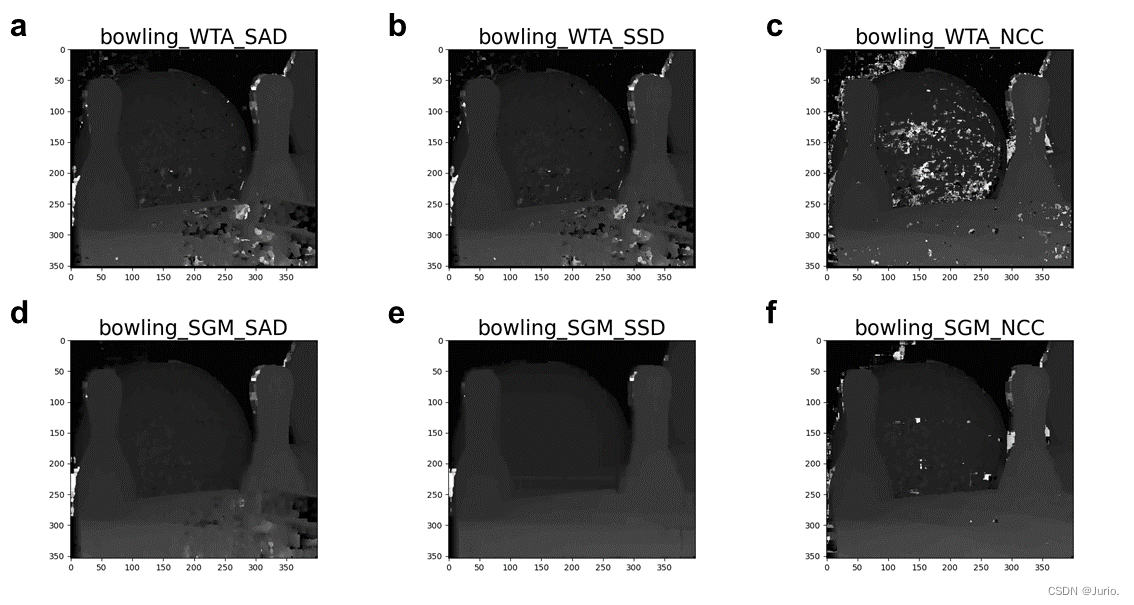
双目立体匹配算法--归一化互相关(NCC)详解和代码实现(python)
原理: 对于原始的图像内任意一个像素点 ( p x , p y ) (p_x,p_y) (px,py)构建一个 n × n n\times n n×n的邻域作为匹配窗口。然后对于目标相素位置 ( p x + d , p y ) (p_x+d, p_y) (px+d,py)同样构建一个 n × n n\times n n×n大小的匹配窗口,对两个窗口进行相似度度量,注意这里的 d d d有
middlebury立体匹配评估使用方法总结(三)——线上版教程
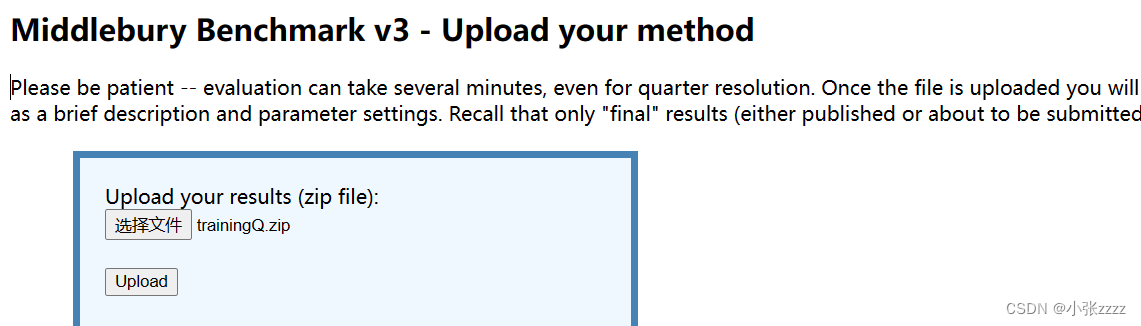
系列文章目录 middlebury立体匹配评估使用方法总结(一)——网站说明 middlebury立体匹配评估使用方法总结(二)——python版离线教程 middlebury立体匹配评估使用方法总结(三)——线上版教程 文章目录 系列文章目录前言1.网站介绍2.创建压缩包注意事项3.创建压缩包4.上传压缩包,等待测评结果 前言 一直也没有弄线上测评的文章,鉴于

【立体匹配和深度估计 2】Middlebury Stereo Datasets
参考《高精度立体匹配算法研究》 vision.middlebury.edu 由 Daniel Scharstein 和 Richard Szeliski 及其他研究人员维护。Middlebury Stereo Vision Page 主要提供立体匹配算法的在线评价和数据下载服务。它由《A taxonomy and evaluation of dense two-fram
立体匹配算法在Ubuntu系统中使用Middlebury数据集评估的步骤
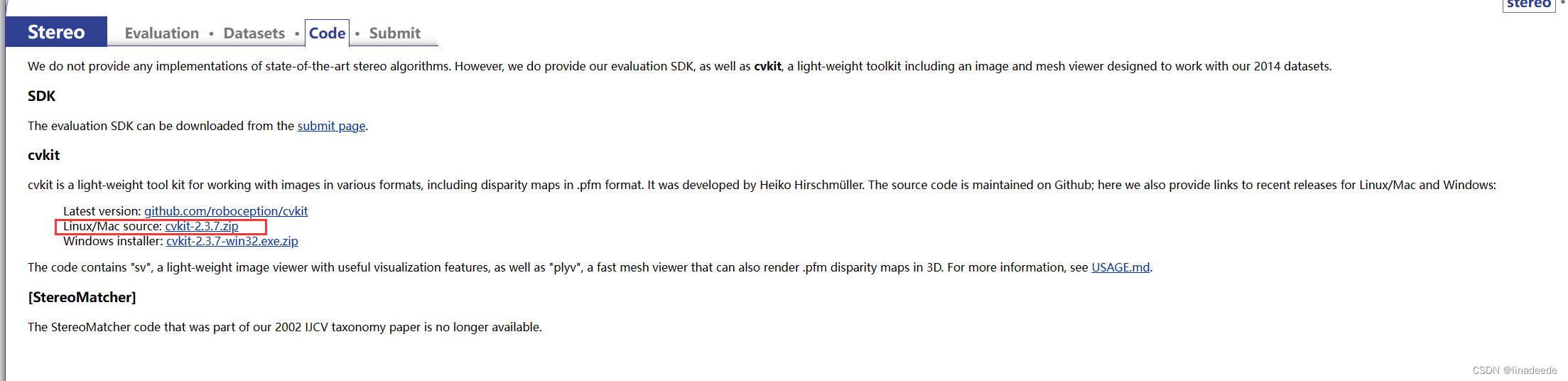
1.概要 最近在研究立体匹配算法在FPGA硬件平台上的部署,算法质量的评估通常可以采用Middlebury数据集或者是KITTI数据集平台,本文主要是记录使用Middlebury数据集评估的方法和步骤。 2.首先需要下载SDK包和数据集 下载地址:vision.middlebury.edu/stereo/submit3 3.在ubuntu20中将SDK解压和将数据集中 MiddEval

双目深度估计 立体匹配 论文综述及数据集汇总 Deep Stereo Matching paper review and dataset
双目深度估计 立体匹配 论文综述及数据集汇总 paper review and dataset Paper0. End-to-End Learning of Geometry and Context for Deep Stereo Regression1. StereoNet: Guided Hierarchical Refinement for Real-Time Edge-Aware D

基于pytorch的CREStereo立体匹配算法
文章目录 前言一、CREStereo是什么?1.自适应群相关层局部特征注意力2D-1D转换局部搜索可变形的搜索窗口Group-wise相关性 2.级联的网络3.叠加级联推理4.叠加级联推理损失函数 二、基于pytorch的CREStereo立体匹配算法 前言 CREStereo目前在middlebury上的排名第三(前两名是cvpr2023的文章),非常值得学习和借鉴。

立体匹配网络中的domain adaptation问题:AdaStereo
文章目录 概述损失函数 概述 希望讨论的问题是什么? 以PSMNet为例,其在Middlebury数据集上进行预训练得到的模型,在KITTI上的推理效果或许就不好。这篇文章就想聊聊怎么去处理不同场景下的模型的适应问题。又或者说,模型的泛化问题。 参考论文及相关信息为: 是商汤2020年的工作。 论文的效果怎么样? 能否简要概述是怎么解决的问题? 假定现在有两个数据集,
