极点专题

电路笔记(PCB):数字滤波电路的拉普拉斯变换与零极点分析
拉普拉斯变换基础 拉普拉斯变换 拉普拉斯变换是一种积分变换,用于将一个时间域的函数(通常是信号或系统的响应)转换为一个复频域的函数。这种变换可以简化许多微分方程和线性系统分析的过程。其定义为: L { f ( t ) } = F ( s ) = ∫ 0 ∞ f ( t ) e − s t d t \mathcal{L}\{f(t)\} = F(s) = \int_{0}^{\infty} f
二分查找、三分查找求极点、二分求等比数列【模板】
二分查找: int a[110],N;int BinarySearch(int *a,int x){int Left = a[1];int Right = a[N];while(Left <= Right){int mid = (Left+Right)>>1;if(a[mid] == x)return mid;else if(a[mid] > x)Right = mid - 1;elseLe

【安装笔记-20240612-Linux-内网穿透服务之cpolar极点云】
安装笔记-系列文章目录 安装笔记-20240612-Linux-内网穿透服务之 cpolar 极点云 文章目录 安装笔记-系列文章目录安装笔记-20240612-Linux-内网穿透服务之 cpolar 极点云 前言一、软件介绍名称:cpolar极点云主页官方介绍 二、安装步骤测试版本:openwrt-23.05.3-x86-64注册登入 三、应用场景构建小型 Linux 服务器网站
传递函数极点和零点的几何表示
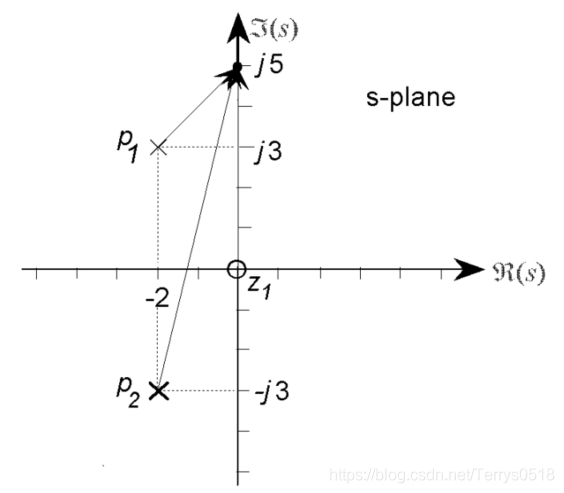
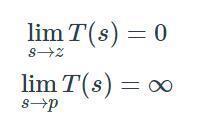
1. 系统的极点和零点 传递函数为确定重要的系统响应特性提供了不需要求解完整的微分方程的理论。 复数 s = ρ + jω 可以写成 z1 z2...zm 为零点 H(s) -> 0 p1 p2 ...pn为极点 H(s) - > ∞ example1: 传递函数为 2 s + 1 H(s) = -------------
小车倒立摆系统极点配置,LQR闭环控制
在之前直流电机控制仿真里有讲过状态控制的基本架构,有兴趣的同学可以再回去看看,链接如下好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_lqr控制器观测器-CSDN博客 在专栏的前三篇文章 小车倒立摆物理建模与simulink仿真-CSDN博客 小车倒立摆系统线性化,离散化处理-CSDN博客 小车倒立摆系统能控和能观性分析-CSDN博客 我们建立的小车的状态空间方

武汉理工大学课程设计优秀报告_零极点对系统性能的影响分析
自动控制原理优秀开源报告---零极点对系统性能的影响分析 要求完成的主要任务: (包括课程设计工作量及其技术要求以及说明书撰写等具体要求) 当开环传递函数为G1(s)时,绘制系统的根轨迹和奈奎斯特曲线;当开环传递函数为G1(s)时,a分别取0.01,0.1,1,10,100时,用Matlab计算系统阶跃响应的超调量和系统频率响应的谐振峰值,并分析两者的关系;画出(2)中


当初学了信号与系统,微分方程,极点零点,状态方程,输出方程这些感觉还是很有用的。
当初学了信号与系统,微分方程,极点零点这些感觉还是很有用的。还有状态方程,输出方程。这些学了之后再看卡尔曼滤波都好些。中科院考信号与系统是有道理的。 来分析动态系统等等什么的,是有用的。 动态系统基本就是微分方程,你也可以写成积分方程,但是一般都两边求导成微分方程进行求解。 我现在很想重新拿起灰虎的书。 还有方浩的算子法。
matlab极点配置已知超调量,一级倒立摆MATLAB仿真、能控能观性分析、数学模型、极点配置...
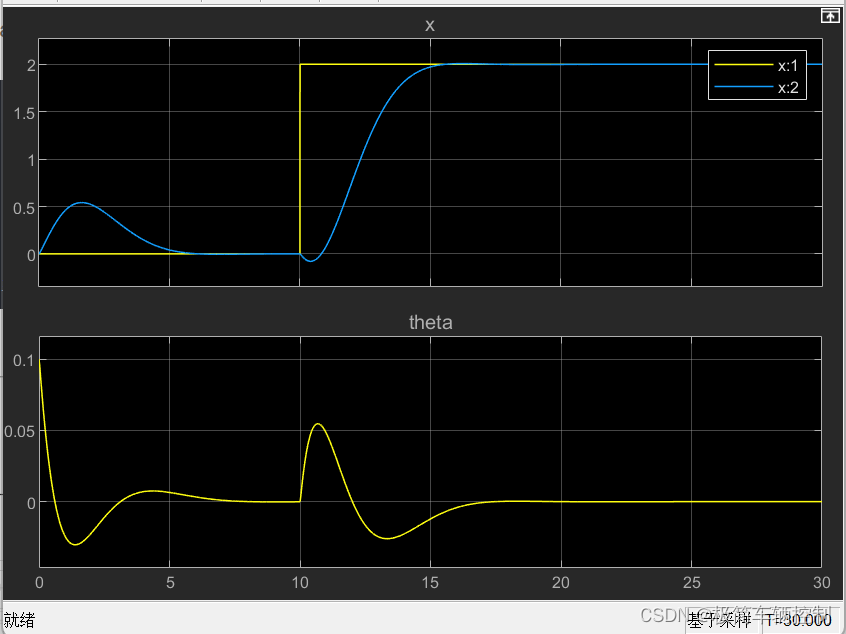
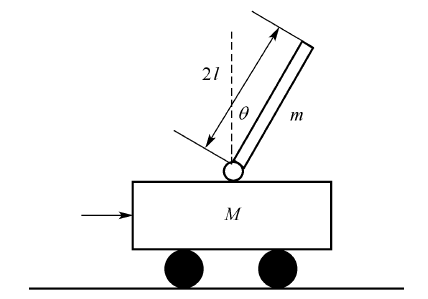
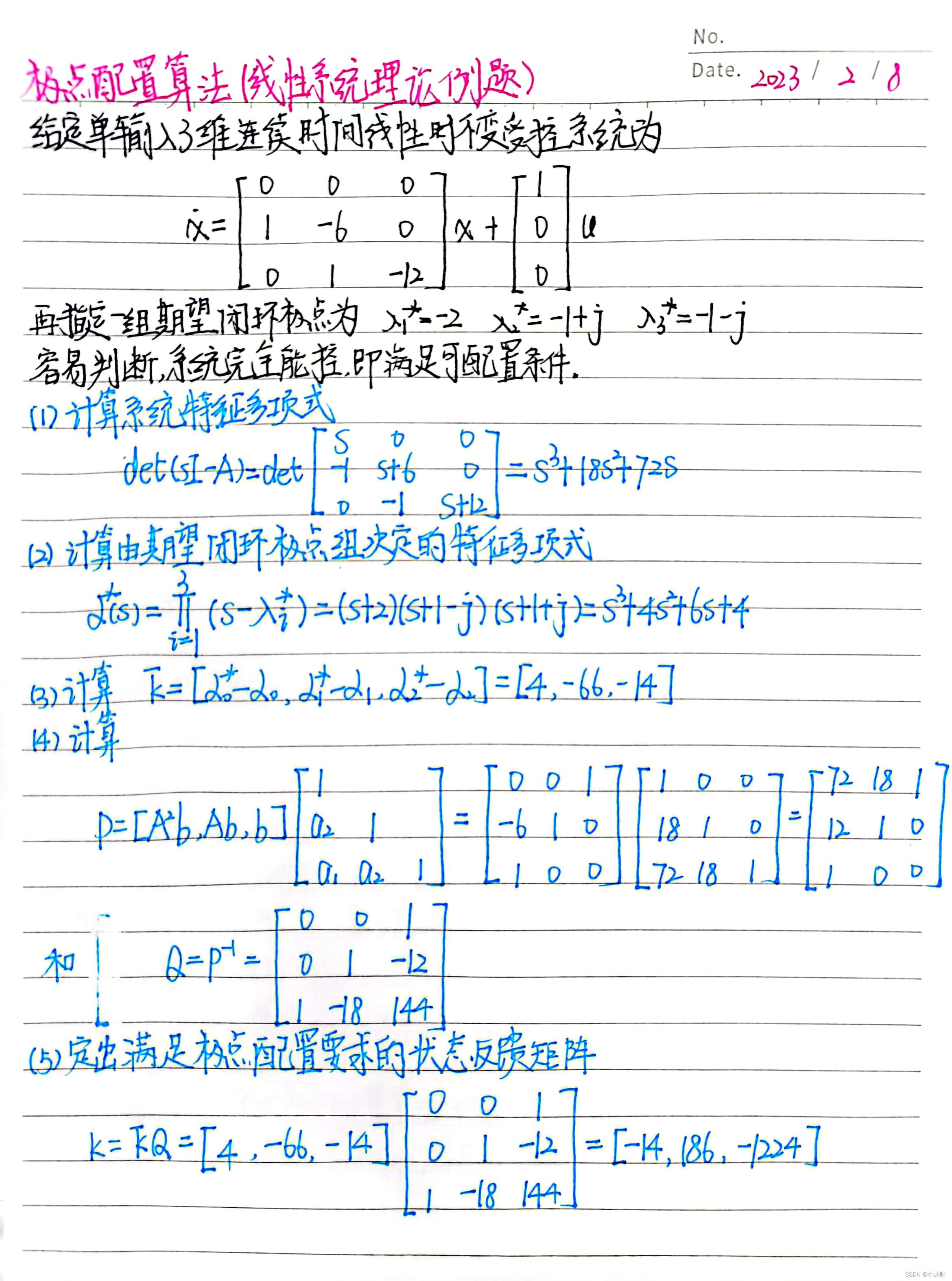
题目一: 考虑如图所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。倒立摆系统的参数包括:摆杆的质量(摆杆的质量在摆杆中心)、摆杆的长度、小车的质量、摆杆惯量等。 图倒立摆系统 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。 要求:1、建立倒立

matlab极点配置已知超调量,利用MATLAB 实现极点配置、设计状态观测器(现代控制).doc...
您所在位置:网站首页 > 海量文档  > 计算机 > matlab 利用MATLAB 实现极点配置、设计状态观测器(现代控制).doc14页 本文档一共被下载:次,您可全文免费在线阅读后下载本文档。 下载提示 1.本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。 2.该文档所得收入(下载+内容+预览三)归上
Matlab的多项式留数与极点的计算
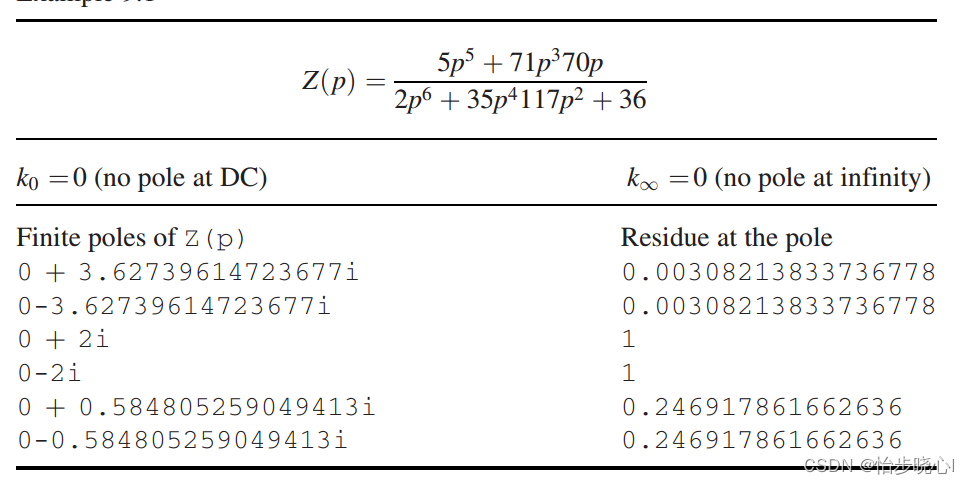
Matlab的多项式留数与极点的计算 以下面的多项式为例: 运算代码: clcclearclosesyms p% 定义多项式Zp=(5*p^5+71*p^3+70*p)/(2*p^6+35*p^4+117*p^2+36);% 提取分子与分母[I,D]=numden(Zp);I=double(coeffs(I,p,"All"));%分子D=double(coeffs(D,p,"
了解传递函数中的极点和零点
原文链接 Robert Keim 之前提出了两种标准方法来为一阶RC低通滤波器制定s域传递函数。简要回顾一些基本概念:传递函数在数学上表示滤波器的频域输入到输出行为;可以用变量s来表示传递函数,它代表复杂的频率,当需要计算特定频率的幅度和相位响应时可以用jω代替s ;传递函数的标准化形式就像一个模板,可以帮助我们快速确定滤波器的定义特征;对标准化一阶传递函数的数学处理使我们能够证明滤波器的

MATLAB 极点图
MATLAB 极点图 num = [20 (2*20+2*200)*2*5*pi 20*2*pi*50*2*pi*50 ]; %开环传递函数的分子多项式den =[1 2*2*pi*5 2*pi*50*2*pi*50]; %开环传递函数的分母多项式sys = tf(num,den);figure(1);zplane(num, den);
各种系统零极点图的实现
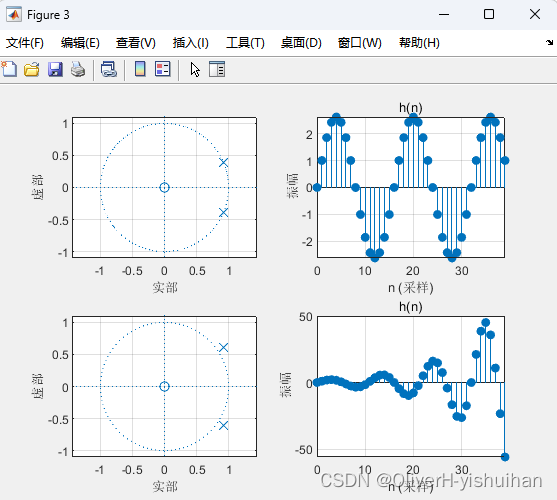
各种系统零极点图的实现 % E_6_6.m % 各种系统零极点图的实现 % 绘制情况(a)系统零极点分布图及系统单位序列响应 % 绘制情况(b)系统零极点分布图及系统单位序列响应 % 各种系统零极点图的实现% % E_6_6.m% 各种系统零极点图的实现clc, clear, close allfigure% 绘制情况(a)系统零极点分布图及系统单位序列响应z = 0;

数字信号处理|Matlab根据z域下因果LTI系统函数画零极点图并判断稳定性
1. LTI系统的系统函数 已知差分方程(y表示输出,x表示激励输入): 将上式进行Z变换: 最后整理等式得到系统函数H(z): 注意:b是分子系数(输入X系数);a是分母系数(输出Y系数) 2. LTI系统条件下的因果、稳定系统 2.1 因果系统 满足因果系统的充要条件: 时域:h(n)为因果系列,即: 当n<0 时 h(n) < 0 Or z域:要满足R

通过在Z平面放置零极点的来设计数字滤波器
文章来源地址:https://www.yii666.com/blog/393376.html 通过在Z平面放置零极点的来设计数字滤波器 要求:设计一款高通滤波器,用在音频信号处理过程中,滤掉100Hz以下的信号。 实现方法:通过在Z平面放置零极点的来设计数字滤波器。设计要点:单位圆上对应于需要加强频率的点附近放置极点,即w=π处附近落极点,需要拉低的频点附近放置零点,即w=0处附近落零点。为
图腾柱无桥PFC,平均电流控制 环路建模然后设计出电压环和电流环补偿网络,零极点放置
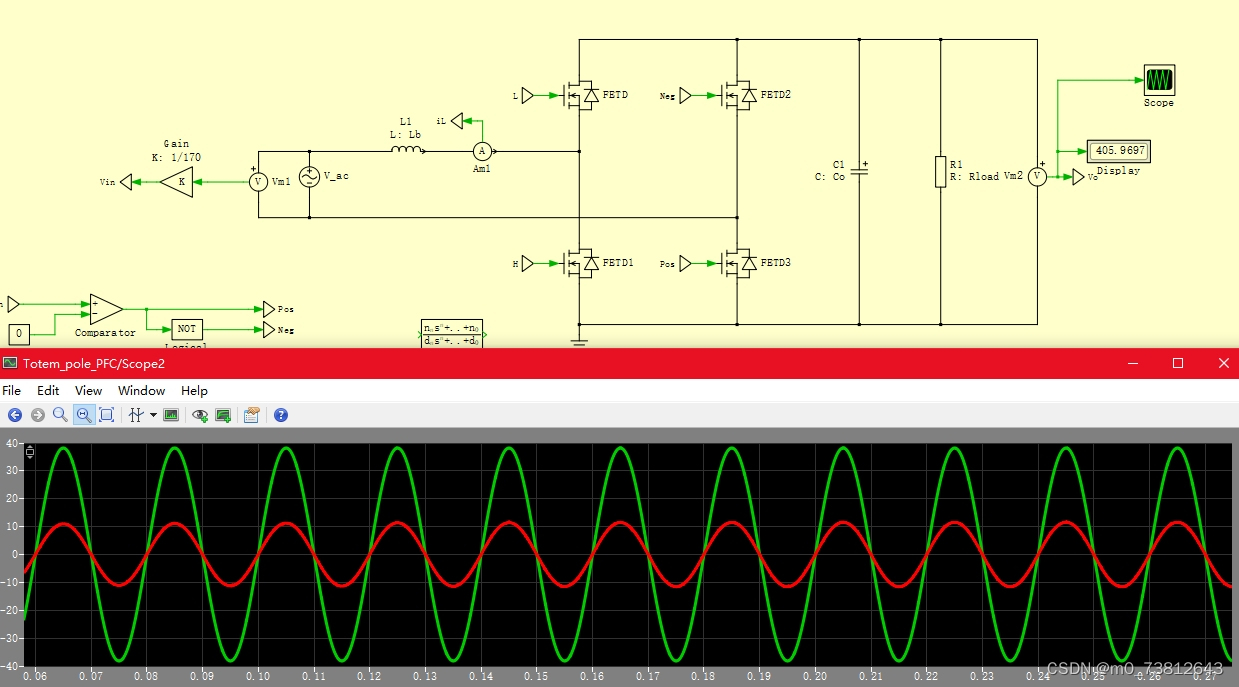
图腾柱无桥PFC,平均电流控制。 环路建模然后设计出电压环和电流环补偿网络,零极点放置。 PLECS、psim和simulink均验证过,均有对应模型。 同时Dual-boost PFC及两相、三相交错并联图腾柱PFC均有。 YID:6566658337428528迷***吟
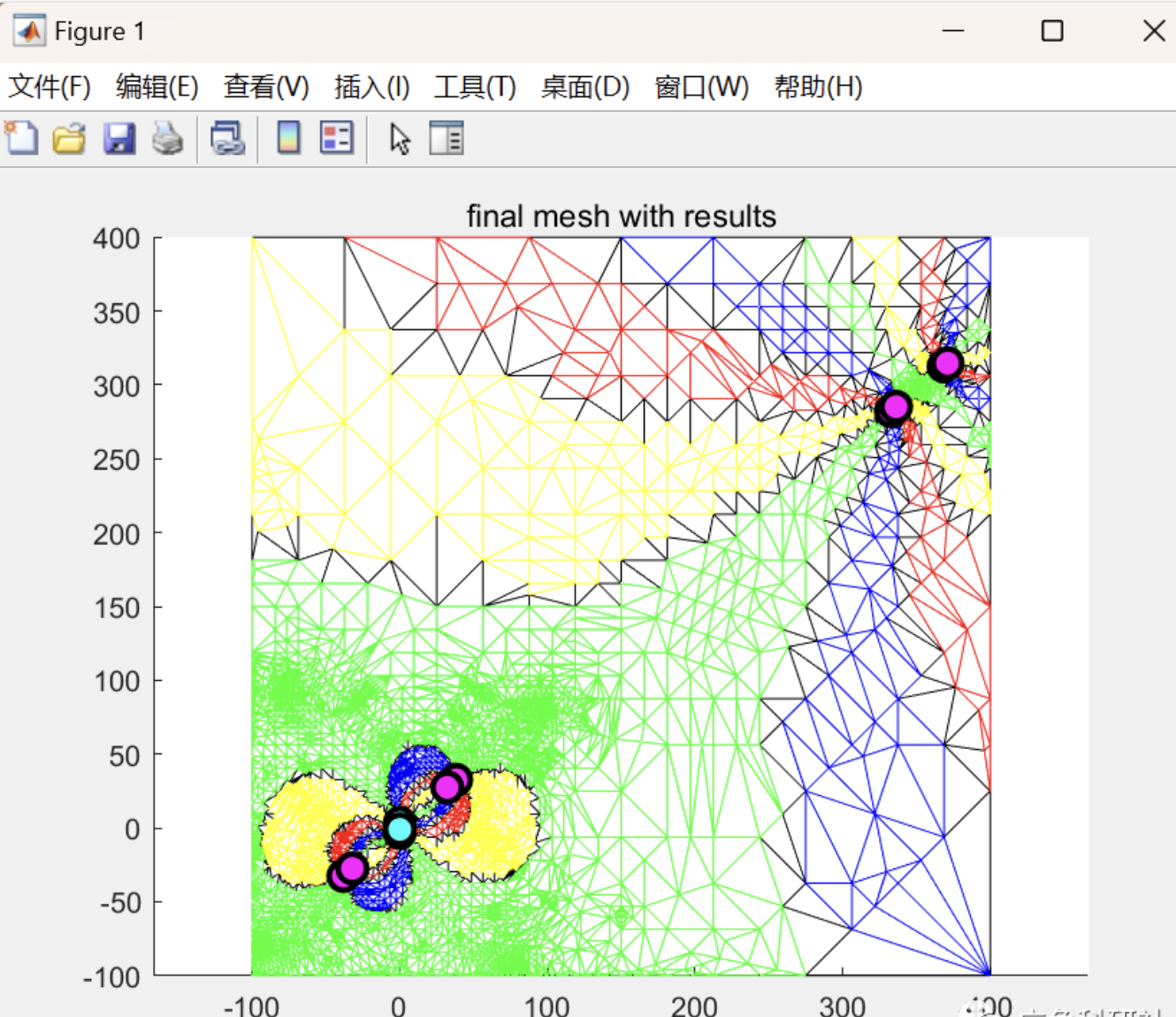
用于全局复根和极点查找算法的自适应网格生成器(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果编辑 🎉3 参考文献 🌈4 Matlab代码实现 💥1 概述 SA-GRPF算法旨在找到固定区域中函数的所有零点和极点。该程序包括

开关电源环路学习笔记(8)-如何快速看出零点和极点
不知不觉,环路内容已经写了7节了,以理论分析为主,下面来说说兄弟们都很关心的内容——零点和极点。 前面几节内容,我们已经将传递函数的来源,推导过程说明白了。有了传递函数,我们就能够画出波特图,就能够分析系统到底稳不稳定。 但是问题来了,假如我们得到的波特图表明这个系统是不稳定的,那么该如何调整呢?该修改什么器件呢?或者说一个原本稳定的系统,但是我们想修改其中某个元件,会不会造成系统不稳定?