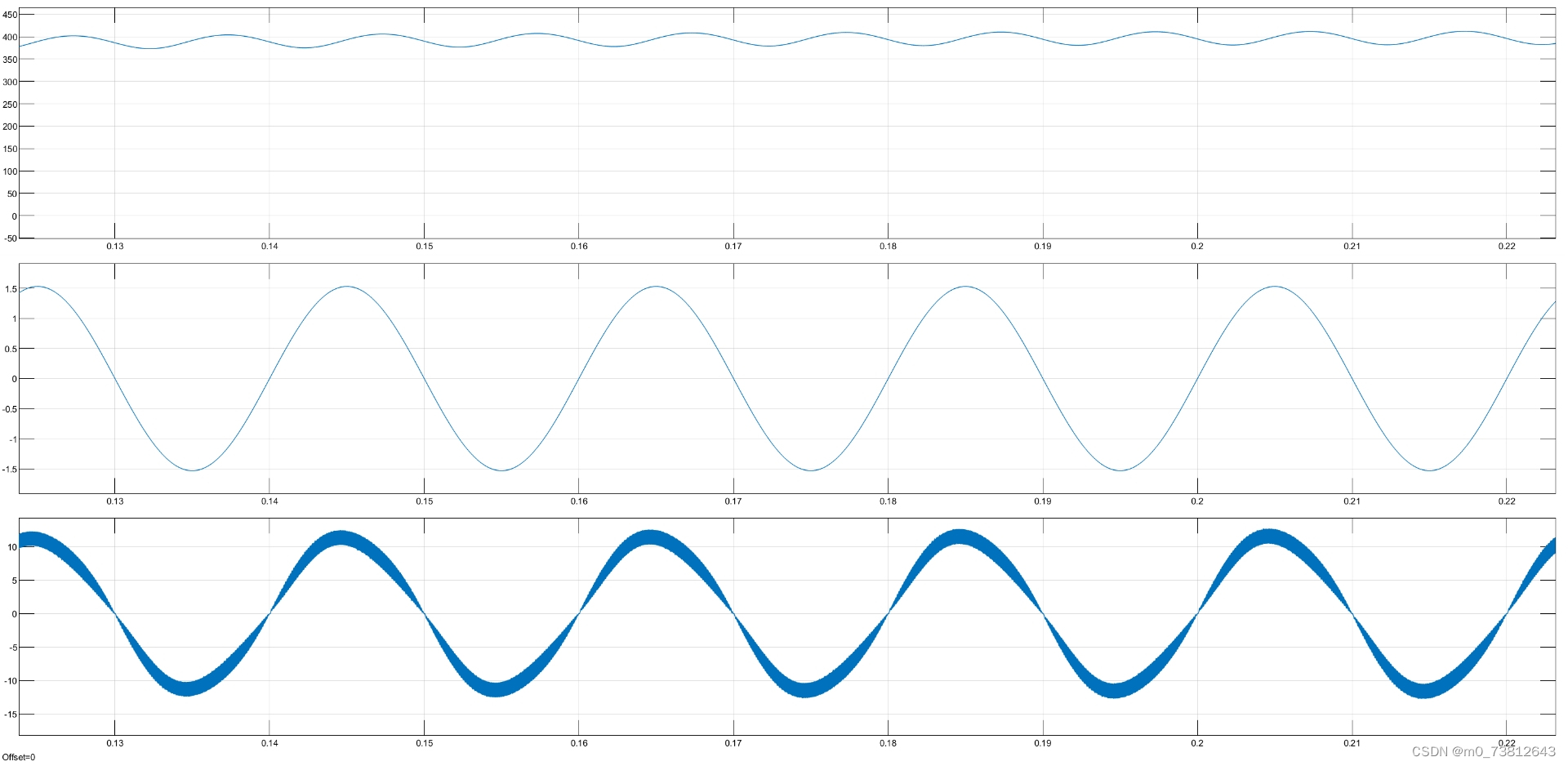
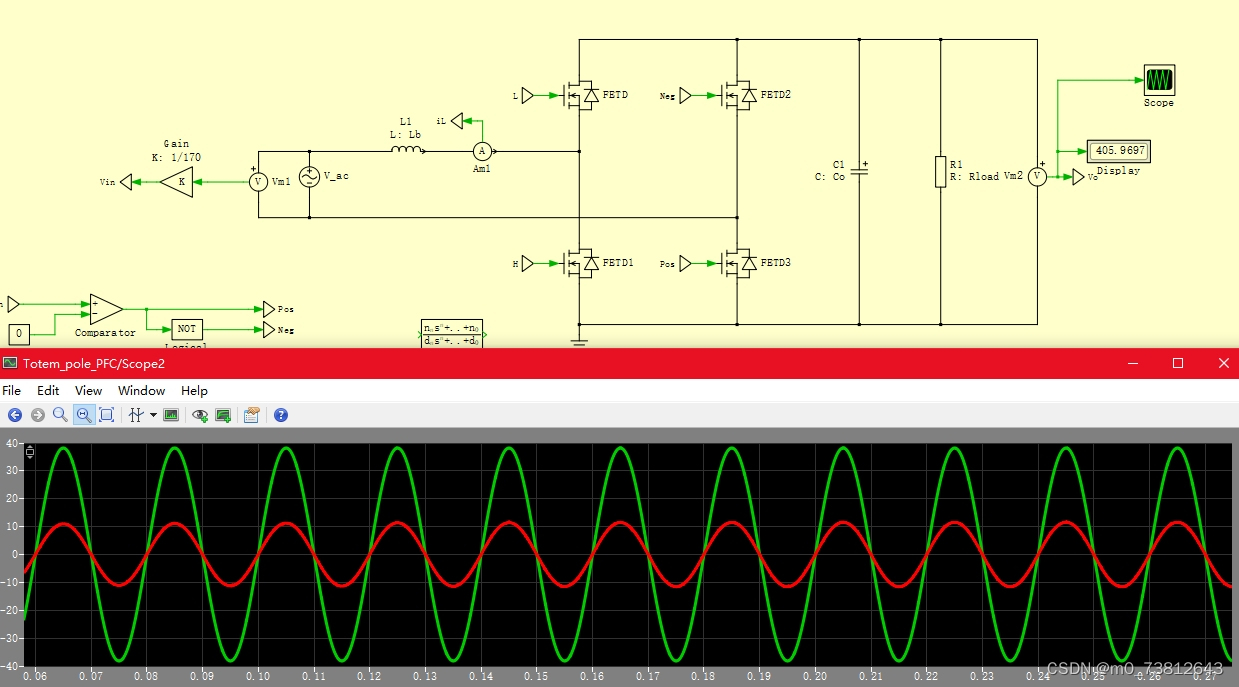
本文主要是介绍图腾柱无桥PFC,平均电流控制 环路建模然后设计出电压环和电流环补偿网络,零极点放置,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
图腾柱无桥PFC,平均电流控制。
环路建模然后设计出电压环和电流环补偿网络,零极点放置。
PLECS、psim和simulink均验证过,均有对应模型。
同时Dual-boost PFC及两相、三相交错并联图腾柱PFC均有。
YID:6566658337428528 迷***吟
迷***吟
这篇关于图腾柱无桥PFC,平均电流控制 环路建模然后设计出电压环和电流环补偿网络,零极点放置的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





