本文主要是介绍matlab极点配置已知超调量,一级倒立摆MATLAB仿真、能控能观性分析、数学模型、极点配置...,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
题目一:
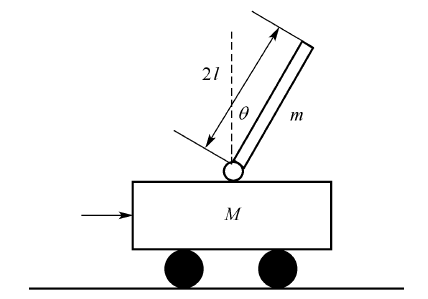
考虑如图所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。倒立摆系统的参数包括:摆杆的质量(摆杆的质量在摆杆中心)、摆杆的长度、小车的质量、摆杆惯量等。
图倒立摆系统
设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。
要求:1、建立倒立摆系统的数学模型
2、分析系统的性能指标——能控性、能观性、稳定性
3、设计状态反馈阵,使闭环极点能够达到期望的极点,这里所说的期望的极点确定
是把系统设计成具有两个主导极点,两个非主导极点,这样就可以用二阶系统的
分析方法进行参数的确定
4、用MATLAB 进行程序设计,得到设计后系统的脉冲响应、阶跃响应,绘出相应状
态变量的时间响应图。
解:
1 建立一级倒立摆系统的数学模型
1.1 系统的物理模型
如图1所示,在惯性参考系下,设小车的质量为M ,摆杆的质量为m ,摆杆长度为l,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用在小车上的水平控制力为u。这样,整个倒立摆系统就受到重力,水平控制力和摩擦力的3外力的共同作用。
这篇关于matlab极点配置已知超调量,一级倒立摆MATLAB仿真、能控能观性分析、数学模型、极点配置...的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





