超调量专题

PID控制里面积分控制为什么能消除静态误差及微分控制为什么能减少超调量的原因
《这篇文章较为生动的叙述了这一点》 PID控制应该算是应用非常广泛的控制算法了。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。这里我们从原理上来理解PID控制。 PID(proportion integration differentiation)其实就是指比例,积分,微分控制。先把图片和公式摆出来,看不懂没关系。(一开始看这个算法,公式能看懂,具体怎么用怎
matlab极点配置已知超调量,一级倒立摆MATLAB仿真、能控能观性分析、数学模型、极点配置...
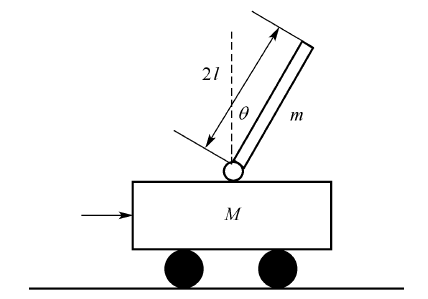
题目一: 考虑如图所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。倒立摆系统的参数包括:摆杆的质量(摆杆的质量在摆杆中心)、摆杆的长度、小车的质量、摆杆惯量等。 图倒立摆系统 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。 要求:1、建立倒立

matlab极点配置已知超调量,利用MATLAB 实现极点配置、设计状态观测器(现代控制).doc...
您所在位置:网站首页 > 海量文档  > 计算机 > matlab 利用MATLAB 实现极点配置、设计状态观测器(现代控制).doc14页 本文档一共被下载:次,您可全文免费在线阅读后下载本文档。 下载提示 1.本站不保证该用户上传的文档完整性,不预览、不比对内容而直接下载产生的反悔问题本站不予受理。 2.该文档所得收入(下载+内容+预览三)归上