观性专题

非线性系统【八】|线性系统的能观性与能控性
非线性系统【八】|线性系统的能观性与能控性 对于如下系统 X ˙ = A X + B U Y = C X \dot{X} = AX + BU\\ Y=CX X˙=AX+BUY=CX 其中 X X X为状态量, Y Y Y为观测量 能控性 格拉姆矩阵判据 系统完全能控的充要条件是存在常数 T > 0 T>0 T>0,使得矩阵 W c ( 0 , T ) = ∫ 0 T e − A t
matlab极点配置已知超调量,一级倒立摆MATLAB仿真、能控能观性分析、数学模型、极点配置...
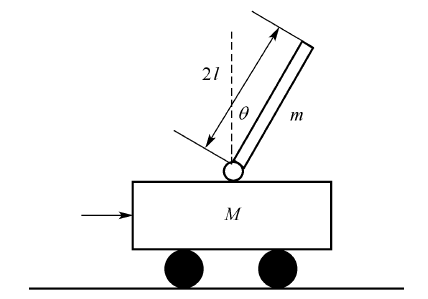
题目一: 考虑如图所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。倒立摆系统的参数包括:摆杆的质量(摆杆的质量在摆杆中心)、摆杆的长度、小车的质量、摆杆惯量等。 图倒立摆系统 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。 要求:1、建立倒立