倒立专题

直线一级倒立摆微分建模
建模内容如下: https://mp.weixin.qq.com/s?__biz=Mzg5OTIyNDEzMg==&mid=2247483673&idx=1&sn=c4e8024ebffd87611b757f7fd570f3c4&chksm=c057c632f7204f2442d0aab652847e342447fa604f04d74faafb798f022fb30e

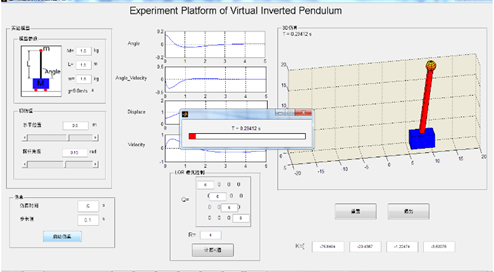
【运动学】基于matlab GUI倒立摆系统【含Matlab源码 1117期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab GUI倒立摆系统【含Matlab源码 1117期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级版),凭支
【运动学】基于matlab GUI平衡车一阶倒立摆仿真【含Matlab源码 1258期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【运动学】基于matlab GUI平衡车一阶倒立摆仿真【含Matlab源码 1258期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab物理应用(初级版) 备注: 点击上面蓝色字体付费专栏Matlab物理应用(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab物理应用(初级
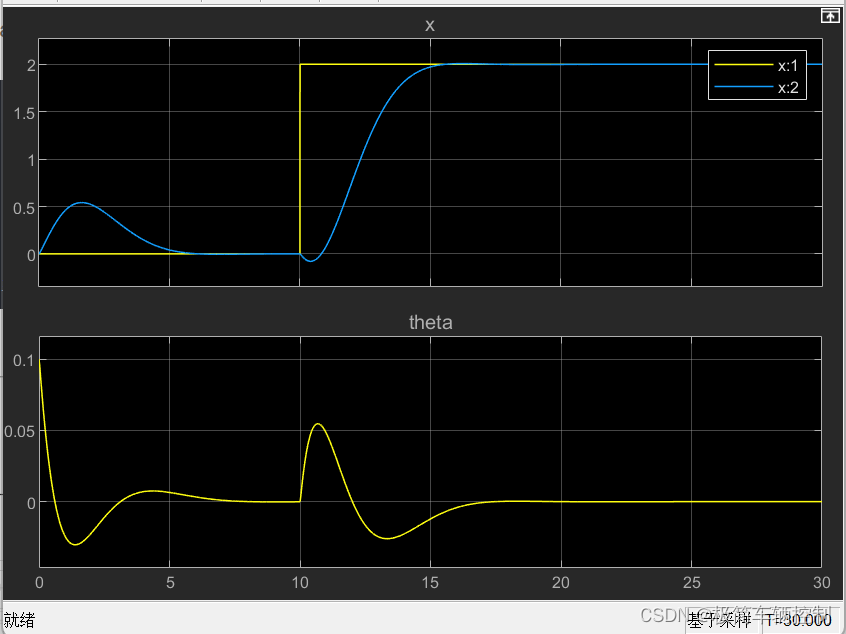
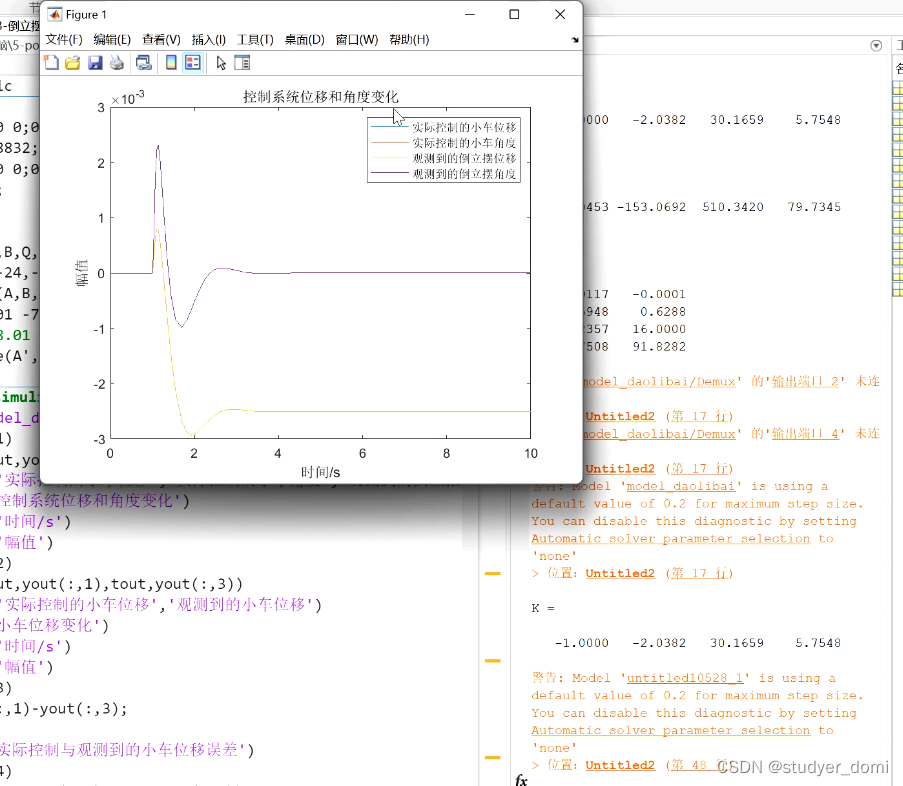
小车倒立摆系统极点配置,LQR闭环控制
在之前直流电机控制仿真里有讲过状态控制的基本架构,有兴趣的同学可以再回去看看,链接如下好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_lqr控制器观测器-CSDN博客 在专栏的前三篇文章 小车倒立摆物理建模与simulink仿真-CSDN博客 小车倒立摆系统线性化,离散化处理-CSDN博客 小车倒立摆系统能控和能观性分析-CSDN博客 我们建立的小车的状态空间方
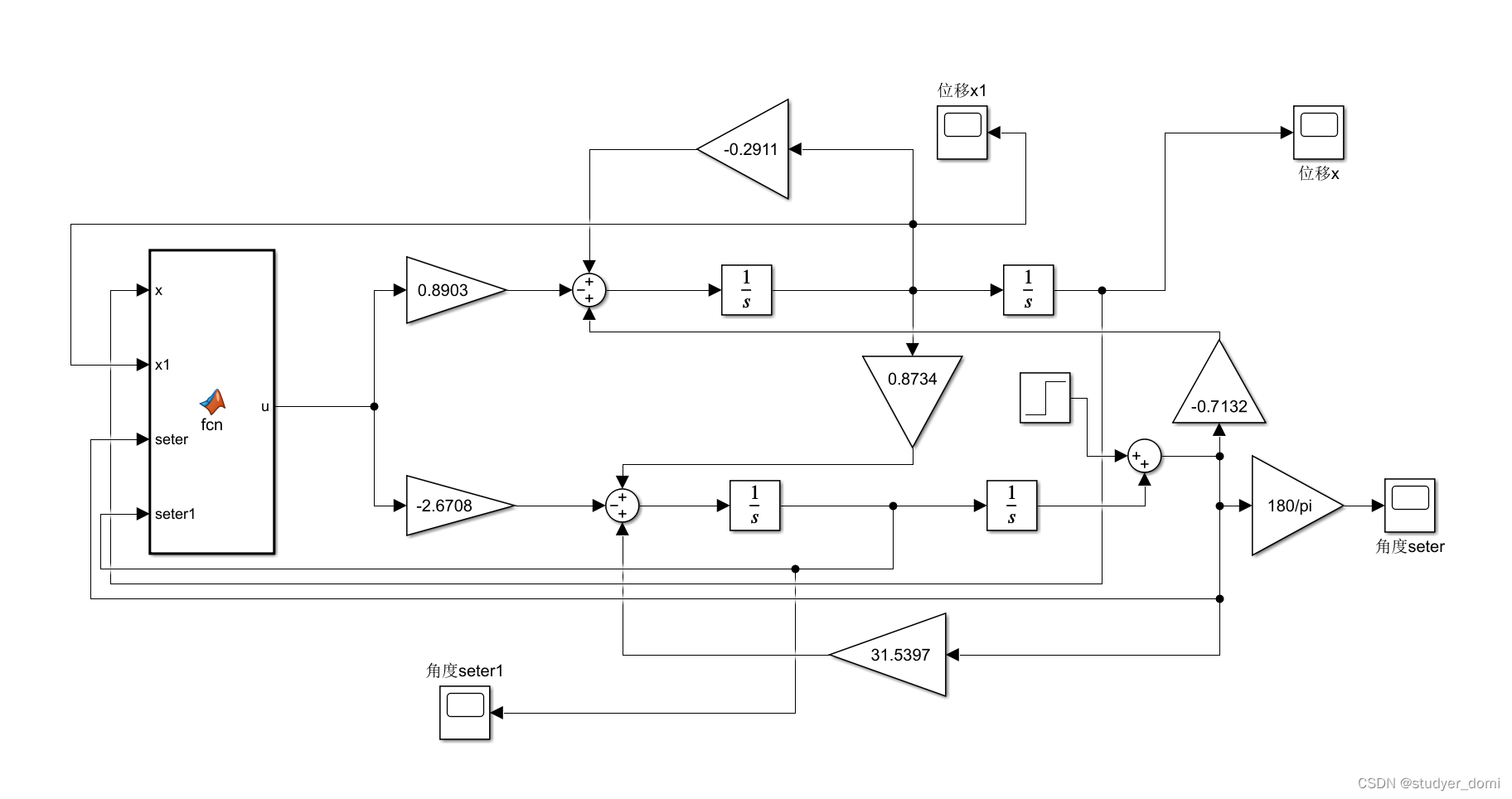
matlab simulink 一阶倒立摆LQR控制
1、内容简介 略 80-可以交流、咨询、答疑 一阶倒立摆LQR控制 2、内容说明 略 一级倒立摆系统的数学模型 系统的组成系统由小 车、小球和轻质杆组成。 倒摆通过转动关节安装在 驱动小车上,杆子的一端 固定在小车上,另一端可 以自由的左右倒下。通过 对小车施加一定的外部驱 动力,使倒摆保持一定的 姿势。 小车质量 ;

【倒立摆】仿真、起摆 (有代码,有仿真)
有代码,有仿真,在最底下链接里看 建模 在此示例中,我们将考虑带有推车的倒立摆系统的二维版本,其中摆锤位于 被限制在垂直平面内移动,如下图所示。对于该系统,控制输入是水平移动小车的力 F F F,输出是摆的角位置KaTeX parse error: Undefined control sequence: \θ at position 1: \̲θ̲和小车的水平位置 x x x。 动画仿真
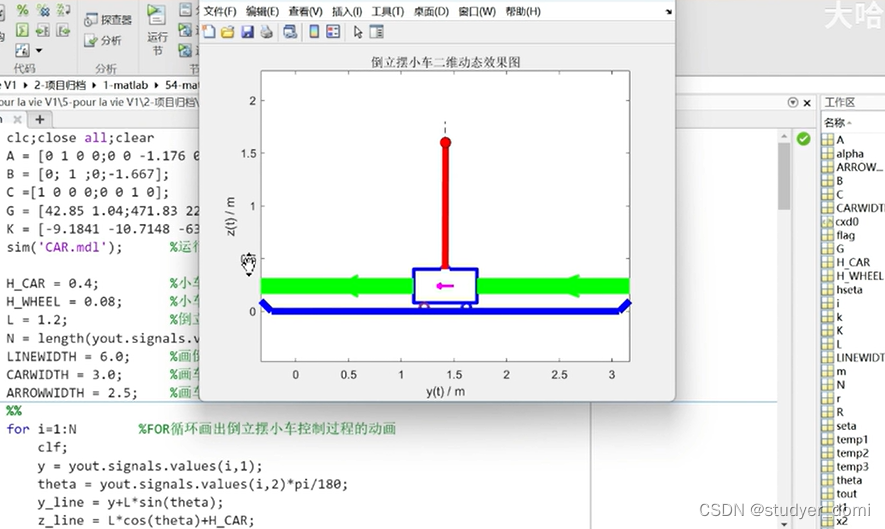
matlab倒立摆小车LQR控制动画
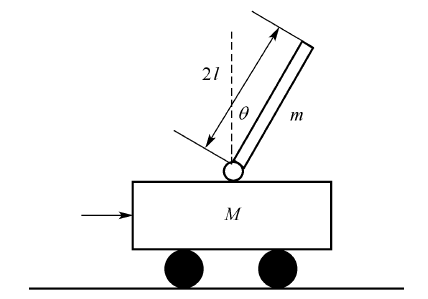
1、内容简介 略 54-可以交流、咨询、答疑 2、内容说明 略 摆杆长度为 L,质量为 m 的单级倒立摆(摆杆的质心在杆的中心处),小车的质量为 M。在水平方向施加控制力 u,相对参考系产生位移为 y。为了简化问题并且保其实质不变,忽略执行电机的惯性以及摆轴、轮轴、轮与接触面之间的摩擦力及风力。 3、仿真分析 略 matlab倒立摆小车LQR控制动画_哔

MySQL8.0以前 版本可用·忘记初始的root密码完美解决方案(不解决我倒立直播吃屎)
1.首先检查MySQL服务是否启动,若已启动则将其停止服务: cmd输入net stop mysql 服务名无效原因:服务名是你安装MySQL时手动或默认配置的,忘记之后直接查看用cmd输入services.msc,然后在cmd中输入net stop MySQL80即可关闭(也可以直接在打开的msc文件中右键-属性-禁用)。 注意:若此方法还是无法成功,则证明:net start +服务名,
MATLAB - 控制小车上的倒立摆
系列文章目录 前言 一、小车 - 摆杆 小车 - 摆杆模型如图 1 所示,使用 Simscape™ Multibody™ 在 Simulink® 中建模。 图 1:小车上的倒立摆 图 2:Simscape 多体模型 该系统通过对小车施加可变力 进行控制。控制器需要在将小车移动到新位置或摆锤被推向前方(脉冲干扰 )时保持摆锤直立。 二、
Coppeliasim倒立摆demo
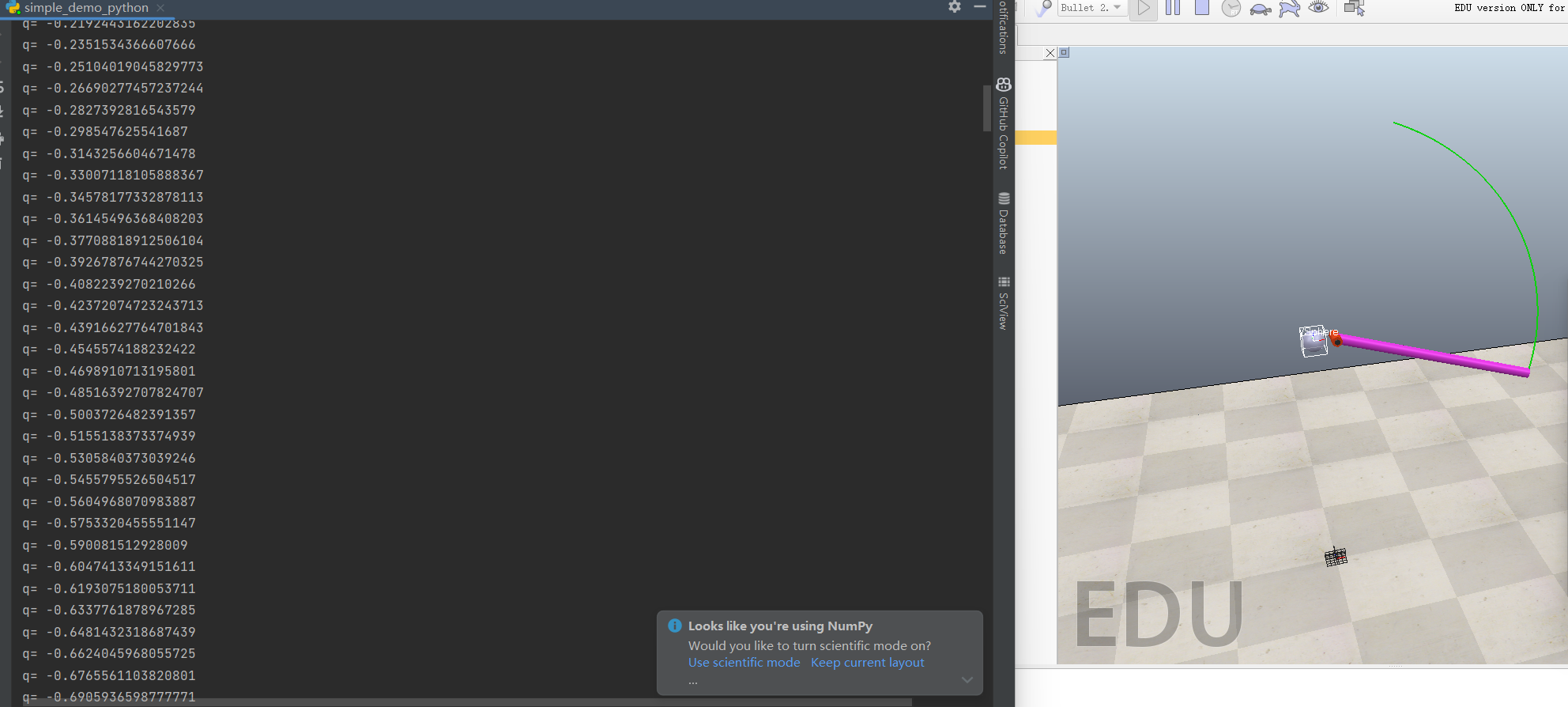
首先需要将使用Python远程控制的文件导入到文件夹,核心是深蓝色的三个文件。 本版本为4.70,其文件所在位置如下图所示,需要注意的是,目前不支持Ubuntu22的远程api: 双击Sphere这一行的灰色文件,可以看到远程 simRemoteApi 的串口号为19998,当在Coppeliasim运行后,后台会发布该串口,可以利用Python进行远程控制。 import

基于强化学习的倒立摆平衡控制系统simulink仿真,可以显示三维虚拟模型动画效果
目录 1.算法仿真效果 2.MATLAB核心程序 3.算法涉及理论知识概要 4.完整MATLAB 1.算法仿真效果 matlab2022a仿真结果如下: 2.MATLAB核心程序 ......................................................%从解码器获取状态向量的索引index

Inverted Pendulum Control--倒立摆控制案例--现代控制理论之创新实践报告说明--ROS+Gazebo
考核要求参考博文:https://blog.csdn.net/ZhangRelay/article/details/88654172 倒立摆小车案例:https://zhangrelay.blog.csdn.net/article/details/51065684 创新实践报告占比10%,请于第8周课程结束前提交!请,请,请独立完成! 本文实现更为简单,降低难度,不用小车,使用
matlab极点配置已知超调量,一级倒立摆MATLAB仿真、能控能观性分析、数学模型、极点配置...
题目一: 考虑如图所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。倒立摆系统的参数包括:摆杆的质量(摆杆的质量在摆杆中心)、摆杆的长度、小车的质量、摆杆惯量等。 图倒立摆系统 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。 要求:1、建立倒立
matlab simulink 直线一级倒立摆控制(自起摆和稳态控制)
1、内容简介 略 6-可以交流、咨询、答疑 2、内容说明 控制器设计 自起摆建模 规定正方向:顺时针为角度(力矩)正方向,向右为位移正方向。 在规定的正方向条件下,图 1 所示摆杆的角度φ为正值, 下车向右加速,故a为正值,则摆杆相对于小车的运动方程可表示为: 其中,J是指摆杆相对于摆杆转轴的转动惯量, 若垂直向下位置规定为π,则有: 由
基于MATLAB的单级倒立摆仿真
有关代码及word文档请关注公众号“挽风笔谈”,后台回复A010.02即可获取 一、单级倒立摆概述 倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆,是一类典型的快速、多变量、非线性、强耦合、自然不稳定系统。由于在实际中存在很多类似的系统,因此对它的研究在理论上和方法上均有重要意义。 单级倒立摆系统(Simple Inverted Pendulum System)是由倒立摆和

强化学习实践(二)Gym(安装、环境搭建、运行倒立摆(代码可运行))
1.准备工作 优先选用conda,conda不仅可以安装python,也是环境管理的工具,我们可以通过conda创建python环境,每个环境之间是相互独立,这样不同的环境可以使用不同版本的python,不同版本的开发包,避免了Python版本不同需要来回切换的问题。 gym目前并不支持python3.11版本,但我最初安装的conda的python是3.11版本,