planner专题

轨迹规划论文阅读20220109-A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles
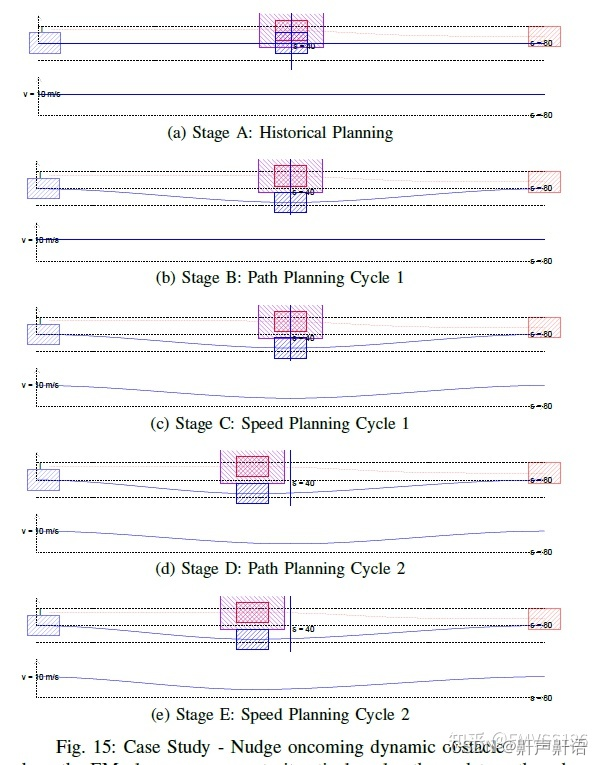
0、摘要 提出了一种基于轨迹优化的高效实时自动驾驶运动规划方法。将轨迹空间离散化->利用cost functions 来找到最佳轨迹。 引[CSDN1]: 规划器首先把规划空间离散化 ,并根据一组代价函数搜索最优轨迹,然后对轨迹的path和speed进行迭代优化。文中提出了一种“post-optimization”的方法,可以弥补离散化难以求出最优解的问题(离散越密,越接近最优解),
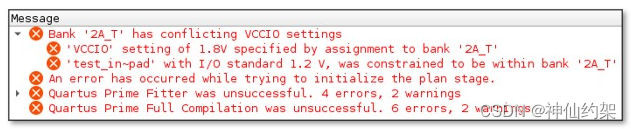
【INTEL(ALTERA)】Quartus® 软件 Pin Planner 中 Agilex™ 5 FPGA的 HSIO 库可以选择 1.8V VCCIO?
目录 说明 解决方法 说明 由于 Quartus® Prime Pro Edition 软件版本 24.1 存在一个问题,Quartus® 软件 Pin Planner 中的 I/O 组属性 GUI 允许用户选择 1.8V 作为 HSIO 银行位置的 VCCIO。HSIO bank 支持的有效 VCCIO 电压仅为 1.0V、1.05V、1.1V、1.2V 和 1.3V。 如果将任何
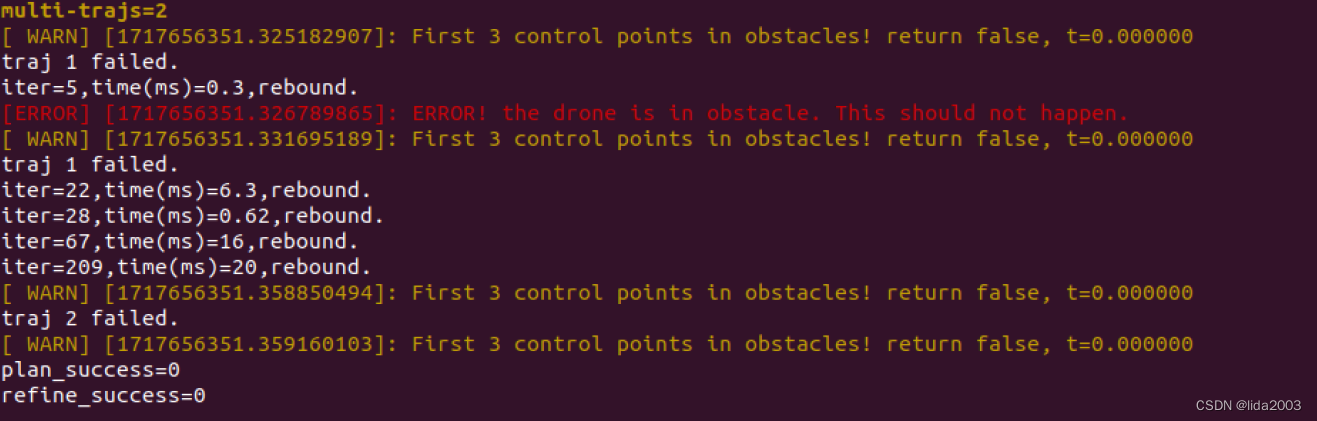
Linux 35.5 + JetPack v5.1.3@ego-planner-swarm编译安装
Linux 35.5 + JetPack v5.1.3@ego-planner-swarm编译安装 1. 源由2. 编译&安装Step 1:依赖库安装Step 2:建立工程Step 3:编译工程Step 4:安装工程 3. 问题汇总3.1 组件ros-noetic-roslint问题3.2 uav_simulator/local_sensing - CUDA优化3.3 编译命令`catkin

Implicit-SDF-Planner代码详解(2)
Implicit-SDF-Planner代码详解(2) 第三部分:轨迹优化 在获得了一条初始路径后,下一步就是在此基础上生成一条光滑、安全、动力学可行的轨迹,这就是轨迹优化要解决的问题。 让我们回到plan_manager.cpp,看看PlannerManager的generateTraj函数: void PlannerManager::generateTraj(const vector<
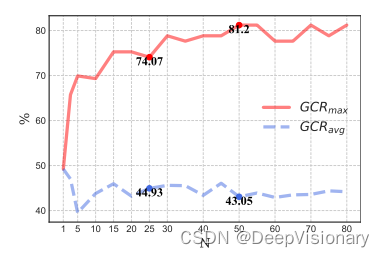
革新机器人任务规划:TREE-PLANNER引领高效、准确的机器人动作生成新趋势
DeepVisionary 每日深度学习前沿科技推送&顶会论文分享,与你一起了解前沿深度学习信息! 引言 任务规划在机器人技术中扮演着至关重要的角色。它涉及到为机器人设计一系列中级动作(技能),使其能够完成复杂的高级任务。这一过程不仅需要考虑机器人的能力,还需考虑周围环境以及可能存在的各种约束和不确定性。近年来,利用大型语言模型(LLMs)直接生成动作成为了任务规划领域的新趋势。这种方法因其卓
Garden Planner for Mac v3.8.62注册激活版:园林绿化设计软件
Garden Planner for Mac是一款专为苹果Mac OS平台设计的园林景观设计软件。这款软件的主要功能是帮助用户设计梦想中的花园,包括安排植物、树木、建筑物和其他物体。 Garden Planner for Mac提供了一个包含1200多种植物和物体符号的库,这些符号都可以进行定制。用户可以使用易于使用的“拖放”界面来排列这些元素,快速创建出理想的花园设计。此外,软件还包含一系列的

lexicographic_planner
系列文章目录 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 TODO:写完再整理 文章目录 系列文章目录前言一、lexicographic_planner介绍二、lexicographic_planner的整体流程1.路径探索的步骤(1)伪代码:(2)步骤 2.路径优化的步骤(1)代价函数的设计(2)通过代价函数挑选最优路径【词袋优化的方法】&#x

ROS Navigation Stack之dwa_local_planner源码分析
DWA和base_local_planner的关系 在base_local_planner包中有两个文件叫trajectory_planner.cpp 以及对应的ros实现,其和DWA是同一层的。 由于nav_core提供了统一的接口,因此我们可以先看看统一的接口有哪些,那我们便知道每一个算法里比较重要的函数有哪些。 nav_core包里的base_local_planner.h文件 //最

路径规划算法:Voronoi Planner讲解
路径规划算法:Voronoi Planner讲解 附赠自动驾驶学习资料和量产经验:链接 Voronoi Diagram(也称作Dirichlet tessellation)是由俄国数学家Georgy Voronoy提出的一种空间分割算法。它通过一系列的种子节点(Seed Points)将空间切分为许多子区域,每个子区域被称为一个Cell,每个Cell中的所有点到当前Cell中的种子节点(S
TEB teb_local_planner 构建超图过程error cost分析
G2O 背景 G20 边和顶点的定义 https://blog.csdn.net/weixin_43013761/category_11647404.html 使用G20优化器 优化 路径 https://blog.csdn.net/qq_29598161/article/details/115414732 https://zhuanlan.zhihu.com/p/121628349 buil
Apollo9.0 Lattice Planner算法源码学习
一、概述 主文件:lattice_planner.cc,相关路径如下: modules\planning\planners\lattice\lattice_planner.ccmodules\planning\planners\lattice\lattice_planner.h 主程序函数: Status LatticePlanner::Plan(const TrajectoryP
一、基于xtdrone的仿真无人机学习:定点飞行 (用ego_planner
参考三维运动规划 · 语雀 零·基础知识 MAVROS(MAVLink to ROS)是一个ROS(Robot Operating System)节点,用于在ROS系统中与PX4飞控系统进行通信。 它通过将MAVLink消息转换为ROS消息,实现了ROS系统与无人机之间的数据交换和控制。 在PX4 SITL(Software-in-the-Loop)仿真环境中,无人机模型通过PX4飞控
Trajectory Rollout planner initialized with param meter_scoring not set.
警告: Trajectory Rollout planner initialized with param meter_scoring not set. Set it to true to make your settings robust against changes of costmap resolution. 未设置使用参数meter_scoring初始化的轨迹卷展栏规划器。将
TARE Planner 注释
system_real_robot.launch 1 local_planner 2 terrain_analysis odometryHandler:计算机器人当前位置相对于上一时刻的位置的X-Y平面的欧式距离 laserCloudHandler:筛选机器人可通行区域,根据默认参数,我理解是坡度在正负11度范围内 最后发布可通行区域的高程图话题 terr
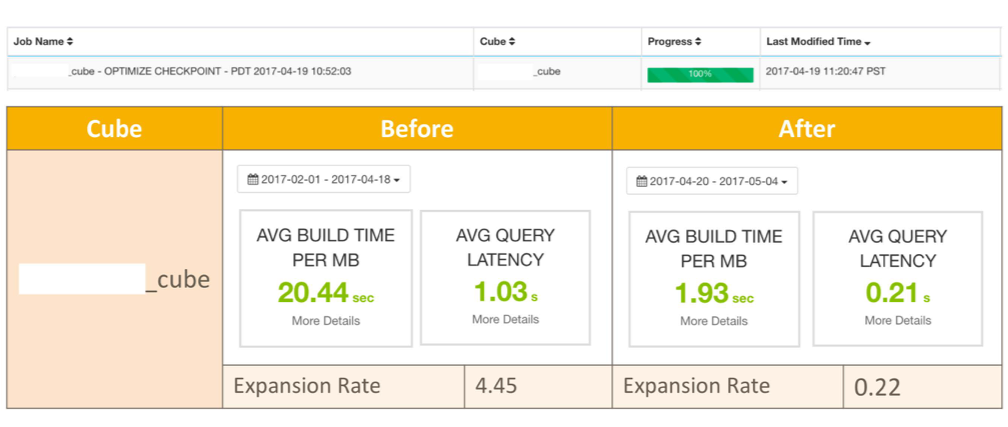
Apache Kylin功能介绍: Cube Planner助力Cube“二次瘦身”
2019独角兽企业重金招聘Python工程师标准>>> 前言 在刘慈欣的科幻小说《三体3·死神永生》中,歌者使用二向箔对太阳系进行降维打击,使其所处的空间维度由三维降低至二位,进而毁灭目标。而在 Apache Kylin 中也存在着类似“降维打击”的工具—— Cube Planner。Cube Planner 机制通过计算不同 Cuboid 的构建成本和收益,并结合用户查询的统计数据挑
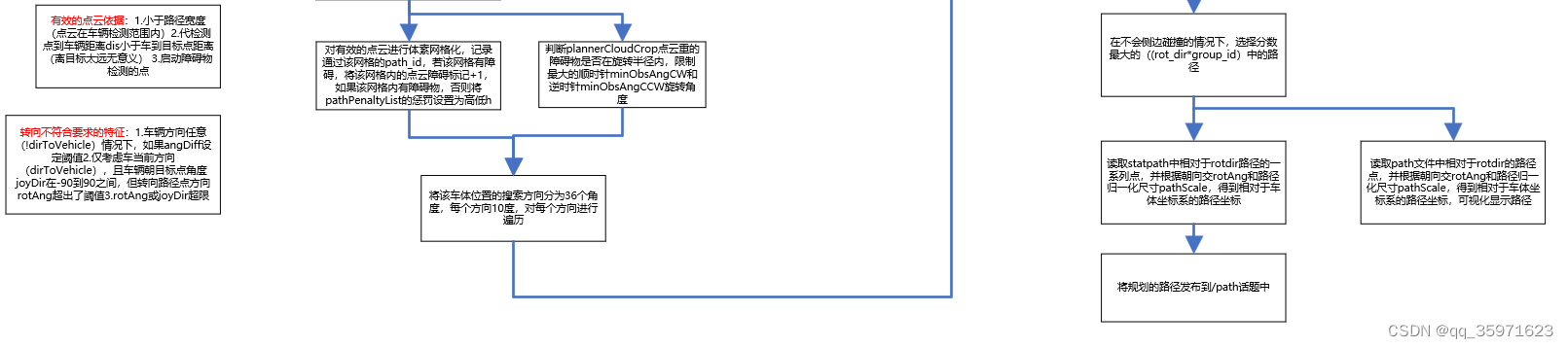
Autonomous_Exploration_Development_Environment的local_planner学习笔记
1.程序下载网址:https://github.com/HongbiaoZ/autonomous_exploration_development_environment 2.相关参考资料: https://blog.csdn.net/lizjiwei/article/details/124437157 Matlab用采样的离散点做前向模拟三次样条生成路径点-CSDN博客 CMU团队开源的局
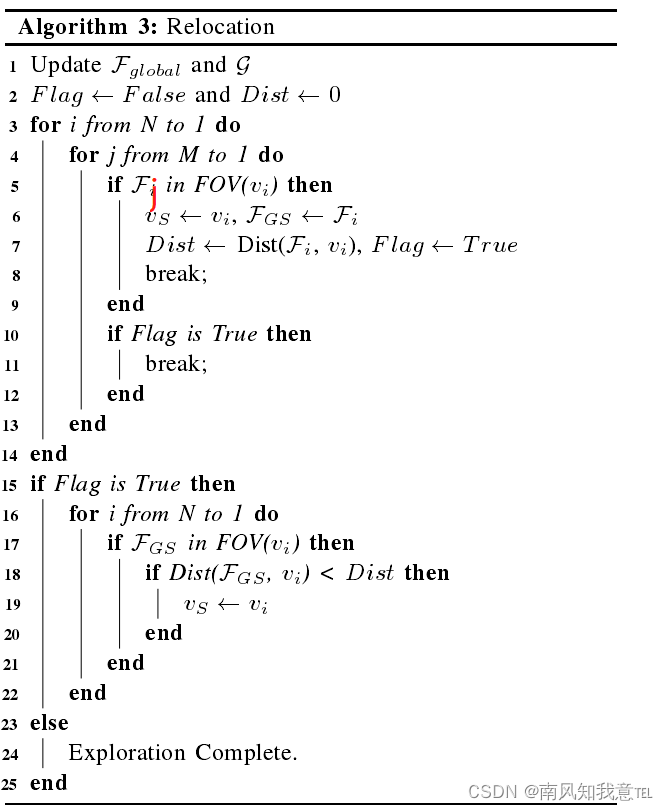
DSVP Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion
目录 DSVP整体思路:主要创新点:详细过程:探索阶段:回溯过程其他: 自己的一些问题: DSVP 文章来源: 2021,IROS 类型: 导航算法 阅读日期: December 16, 2021 DSVP Dual-Stage Viewpoint Planner for Rapid Exploration by Dynamic Expansion 整体思路: 本文算法的

ROS局部路径规划器插件teb_local_planner规划流程概括总结
本部分文章主要用于对ROS局部路径规划器插件teb_local_planner的规划流程进行梳理,并概括总结,本部分计划包含5~6篇文章,各文章主要内容如下: ☆第一篇:主要介绍ROS导航包Navigation中的 Movebase节点中的路径规划的相关流程,并对其进行梳理概括 文章链接如下: ROS导航包Navigation中的 Movebase

EM planner 论文阅读
论文题目:Baidu Apollo EM Motion Planner 0 前言 EM和Lattice算法对比 EM plannerLattice Planner参数较多(DP/QP,Path/Speed)参数少且统一化流程复杂流程简单单周期解空间受限简单场景解空间较大能适应复杂场景适合简单场景 1 摘要 基于百度Apollo平台提出的一种实时运动规划系统,该规划系统包括顶层的多车道和
【Navigation】teb_local_planner 源码解析
ROS局部路径规划器插件teb_local_planner流程梳理(上) ROS局部路径规划器插件teb_local_planner流程梳理(下) 主要文件: test_optim_node.cppteb_planner_ros.cppoptimal_planner.cpp
工程分享 | 自动驾驶路径规划-Lattice Planner算法
点击上方“AI算法修炼营”,选择加星标或“置顶” 标题以下,全是干货 文章来源:百度、焉知自动驾驶 本文整合了网络上关于百度ApolloLattice Planner算法的详细介绍和相关Q&A。 大家好,今天很高兴能给大家分享Apollo 3.0新发布的Lattice规划算法。 Lattice算法隶属于规划模块。规划模块以预测模块、routing模块、高精地图和定位的结果作为输入,通过算
teb planner error
roslaunch teb_local_planner_tutorials robot_diff_drive_in_stage.launch 的时候遇到下面问题: [FATAL] [1557372871.915458637, 2.200000000]: Failed to create the global_planner/GlobalPlanner planner, are you sure

Baidu Apollo代码解析之Open Space Planner中的Hybrid A*
大家好,我已经把CSDN上的博客迁移到了知乎上,欢迎大家在知乎关注我的专栏慢慢悠悠小马车(https://zhuanlan.zhihu.com/duangduangduang)。希望大家可以多多交流,互相学习。 目录 1. 节点的定义 2. Hybrid A*的规划主流程 3. 碰撞检测 4. ReedShepp曲线加速搜索 5. 扩展相邻的节点 6. 计算节点的代价 7

EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors(论文笔记)
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors(论文笔记) ESDF欧式符号距离场避碰力估算基于梯度的轨迹优化平滑惩罚障碍惩罚可行性的惩罚数值优化 传统上,基于梯度的规划器依赖于预先构建的ESDF地图来评估梯度大小和方向,并使用数值优化来生成局部最优解。尽管优化程序收敛速度快,但由于预先构
Apollo lattice与EM planner的区别,两种规划算法的区别与联系
Apollo lattice与EM planner的区别 lattice优点在于:同时生成了符合车辆动力学的路径与速度曲线,不用去进一步平滑处理;且参数较少,计算消耗低;由于轨迹形状固定,比较适合高速或者快速路等简单场景,对于城区复杂道路,EM还是更擅长一些。细节可参考如下链接: Apollo EM planner &&lattice planner ros版本apollo3.0.0规划控制算

3DEXPERIENCE云端项目管理小工具--Project Planner项目策划者角色
云端3DEXPERIENCE平台提供了一个协作环境,使企业和个人能够以全新的方式实现创新。它将人员、创意、数据和解决方案连接到一个始终在线且可用的协作和交互环境中,可以帮助您的企业提高执行力、生产率并加速创新。 3DEXPERIENCE中的Project Planner项目策划者角色,是一个基于Web的简单且独立的应用程序。通过该应用程序,任何项目相关人员或创新团队都可以简单