本文主要是介绍路径规划算法:Voronoi Planner讲解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
路径规划算法:Voronoi Planner讲解

附赠自动驾驶学习资料和量产经验:链接
Voronoi Diagram(也称作Dirichlet tessellation)是由俄国数学家Georgy Voronoy提出的一种空间分割算法。它通过一系列的种子节点(Seed Points)将空间切分为许多子区域,每个子区域被称为一个Cell,每个Cell中的所有点到当前Cell中的种子节点(Seed Points)的距离小于到其它所有种子节点(Seed Points)的距离。

图片来源: https://www.youtube.com/watch?v=7eCrHAv6sYY

每个Cell中包含的都是距离当前Cell距离最近的所有点,因此Cell的边界就是距离种子点(Seed Points)最远的点的集合。利用Voronoi Diagram的这个特性,将障碍物的边界当做种子点(Seed Points),那么Cell的边界就是远离所有障碍物的可行驶路径。
Voronoi Planner最大化的利用了障碍物之间的空隙,确保生成的路径是最大程度远离所有障碍物的安全行驶路径。

图片来源:https://natanaso.github.io/ece276b2018/ref/ECE276B_5_ConfigurationSpace.pdf
1、使用Voronoi Diagram进行路径规划
下图是一所大学校园的地图,图中包含各种多变形的障碍物,我们可以使用使用Voronoi Planner实现在地图中查找一条安全路径,最大程度的避开障碍物。

the northern half of Columbia's Morningside Campus.图片来源:https://www.cs.columbia.edu/~pblaer/projects/path_planner/
为了实现Voronoi路径规划,首先用一系列的离散点集序列组成的小线段模拟逼近多边形障碍物的每个边。

The points that approximate thepolygonal obstacles. 图片来源:https://www.cs.columbia.edu/~pblaer/projects/path_planner/
然后使用这些近似的离散点作为输入,使用Voronoi构造算法构造Voronoi Diagram。

The points that approximate thepolygonal obstacles. 图片来源:https://www.cs.columbia.edu/~pblaer/projects/path_planner/
Voronoi diagram构造完成之后,消除顶点包含在障碍物或者与障碍物相交的Voronoi Edge,剩下的Voronoi Edge就构成了避开所有障碍物的可行驶路径集合。

The points that approximate thepolygonal obstacles. 图片来源:https://www.cs.columbia.edu/~pblaer/projects/path_planner/
最后,将Voronoi Edge转化为Grahp结构,将机器人的起点位置和终点位置关联到最近的Voronoi Edge,然后通过图搜索算法(Dijkstra等)就可以生成一条从起点到终点的安全行驶路线。
2、Voronio Planner VS Sample Planner
从下图的对比可以看出,Voronoi Planner规划的路径的特点是尽量的远离障碍物。

图片来源:Local and Global Motion Planning for Unmanned Surface Vehicle

图片来源:Local and Global Motion Planning for Unmanned Surface Vehicle
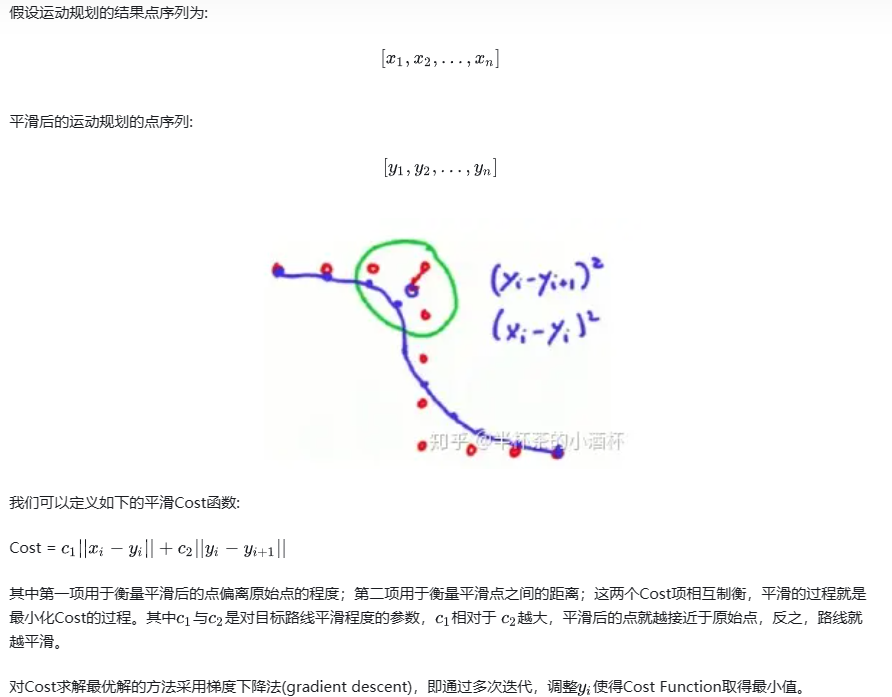
3、梯度下降的路径平滑算法
同基于采样的运动规划生成的曲线一样,Voronio Planner生成的曲线都是不平滑的折线,所以需要对路径进行平滑操作,平滑的方法也比较多,今天先介绍其中一种。
3.1 问题定义
如下图所示,s表示运动规划的起点,e表示运动规划终点,斜线填充的网格表示障碍物位置,蓝色的线为运动规划算法(RRT、Voronoi etc.)规划出的路线,曲折不平;红色为平滑后的运动曲线,对车辆的实际行驶比较友好。

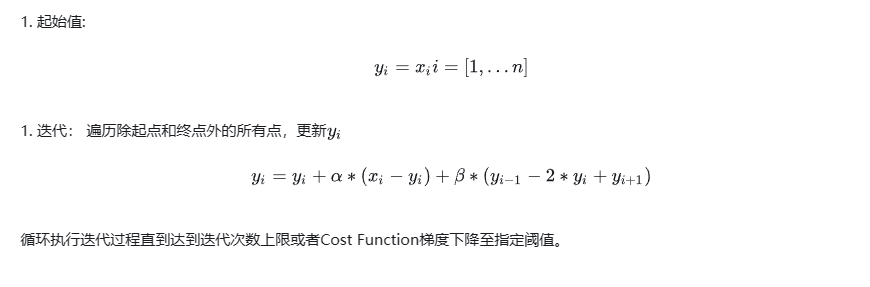
3.2 算法实现
上图代码一个5x5的网格地图,红色圆圈代表一条从(0,0)到(4,4)的规划路线,下Python面代码演示了如何由这条路线生成一条平滑路线。

from math import *path = [[0, 0],[0, 1],[0, 2],[1, 2],[2, 2],[3, 2],[4, 2],[4, 3],[4, 4]]def smooth(path, weight_data = 0.5, weight_smooth = 0.1, tolerance = 0.000001):# Make a deep copy of path into newpathnewpath = [[0 for col in range(len(path[0]))] for row in range(len(path))]for i in range(len(path)):for j in range(len(path[0])):newpath[i][j] = path[i][j]change = tolerancewhile change >= tolerance:change = 0for i in range(1,len(path) - 1):for j in range(len(path[0])):d1 = weight_data * (path[i][j] - newpath[i][j])d2 = weight_smooth * (newpath[i-1][j] + newpath[i+1][j] - 2 * newpath[i][j])change += abs(d1 + d2)newpath[i][j] += d1 + d2return newpath newpath = smooth(path)for i in range(len(path)):print('['+ ', '.join('%.3f'%x for x in path[i]) +']> ['+', '.join('%.3f'%x for x in newpath[i]) +']')
平滑后的路径输出结果如下:
[0.000, 0.000]> [0.000, 0.000]
[0.000, 1.000]> [0.021, 0.979]
[0.000, 2.000]> [0.149, 1.851]
[1.000, 2.000]> [1.021, 1.979]
[2.000, 2.000]> [2.000, 2.000]
[3.000, 2.000]> [2.979, 2.021]
[4.000, 2.000]> [3.851, 2.149]
[4.000, 3.000]> [3.979, 3.021]
[4.000, 4.000]> [4.000, 4.000]
平滑算法的实际应用效果如下:

图片来源:Local and Global Motion Planning for Unmanned Surface Vehicle
相关代码
1、Boost Voronio Diagram。(https://www.boost.org/doc/libs/1_60_0/libs/polygon/doc/voronoi_diagram.htm)
2、Scipy Spatial Voronoi(https://docs.scipy.org/doc/scipy-0.18.1/reference/generated/scipy.spatial.Voronoi.html)
3、Voronoi Planner的代码实现可以参考:
https://github.com/AtsushiSakai/PythonRobotics/blob/master/PathPlanning/VoronoiRoadMap/voronoi_road_map.py
参考链接
1、Boost Voronio Diagram。(https://www.boost.org/doc/libs/1_60_0/libs/polygon/doc/voronoi_diagram.htm)
2、Robot Path Planning Using Generalized Voronoi Diagrams(https://www.cs.columbia.edu/~pblaer/projects/path_planner/)
3、Local and Global Motion Planning for Unmanned Surface Vehicle,Roman Fedorenko, Boris Gurenko
这篇关于路径规划算法:Voronoi Planner讲解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






