moveit专题

ros(noetic) 之moveit机械臂
sudo apt updatesudo apt install ros-noetic-moveit-setup-assistant source devel/setup.sh rosrun moveit_setup_assistant moveit_setup_assistant

Ubuntu16.04 ROS kinetic使用moveit小结
Ubuntu16.04 ROS kinetic使用moveit小结 最近使用moveit中的MoveGroupPython接口控制UR3机械臂移动,在这个过程中踩了一些坑,特将填坑的过程记录一下。 问题一: [ WARN] [1567497398.552827574]: Fail: ABORTED: No motion plan found. No execution at
ros Moveit学习记录(一) MoveIt Setup Assistant
ros MoveIt Setup Assistant 记录 1. 准备工作2. 使用记录a. 打开Moveit! Setup Assistantb. *Create New Moveit Configuration* -> 填入`urdf.xacro`的地址c. Self-Collisions:全选了即可d. Define Virtual Jointse. Define Planning G

【Ubuntu20.04+Noetic】UR5e+Gazebo+Moveit
环境准备 创建工作空间 mkdir -p ur5e_ws/srccd ur5e_ws/src UR机械臂软件包 UR官方没更新最新的noetic的分支,因此安装melodic,并需要改动相关文件。 安装UR的模型配置包,包里面有UR模型文件,moveit配置等: cd ~/ur5e_ws/srcgit clone -b melodic-devel https://githu
Ros-kinetic学习Moveit!配置小结
Ros-kinetic 的Moveit!教程网上并不多,但与indigo的配置方法类似。 首先,安装Moveit! sudo apt-get install ros-kinetic-moveitsource /opt/ros/kinetic/setup.bash 安装pr2相关文件 sudo apt-get install ros-kinetic-pr2-common 打开Mo

实体Panda机械臂,Moveit规划报Unable to find a valid state nearby the start state (using jiggle fraction ...问题
最近用了一款panda机械臂(科研版的)这样式儿的: 依照https://frankaemika.github.io/docs/installation_linux.html 进行了相关配置: 系统信息: Ubuntu18.04 LTS ROS melodic源安装Moveit,源安装libfranka已安装franka_ros包内核版本 4.14.12-rt10 #1 SMP
ROS 运动规划 (Motion Planning): MoveIt! 与 OMPL
最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错误怎么解决。表面上看,解决这些问题的方法就是提供正确的代码,正确的编译方法,正确的运行步骤。 然而,这种解决方法只能解决这个特定的问题,而且解决之后我们也无法学到一些实际的东西。要想彻底明白,需要从源头入手,也就是说, 不要问“MoveIt! 怎么把机械手从空间一个点移到另一个点
ROS Moveit 配置全网最详细教程
前言 Moveit的使用、配置和原理相关的内容较多,特别是assistant生成的moveit_config包,内容较多,在配置时容易让用户搞不清关系,导致配置过程艰难、漫长。 同时互联网的Moveit文档较为杂乱,配置方法也有区别,因此笔者在学习过程中梳理出了Moveit的使用、配置和原理教程,希望对后来人有所帮助。 提示: 本篇文章字数约94000字,阅读时间超2h,建议收藏作为move
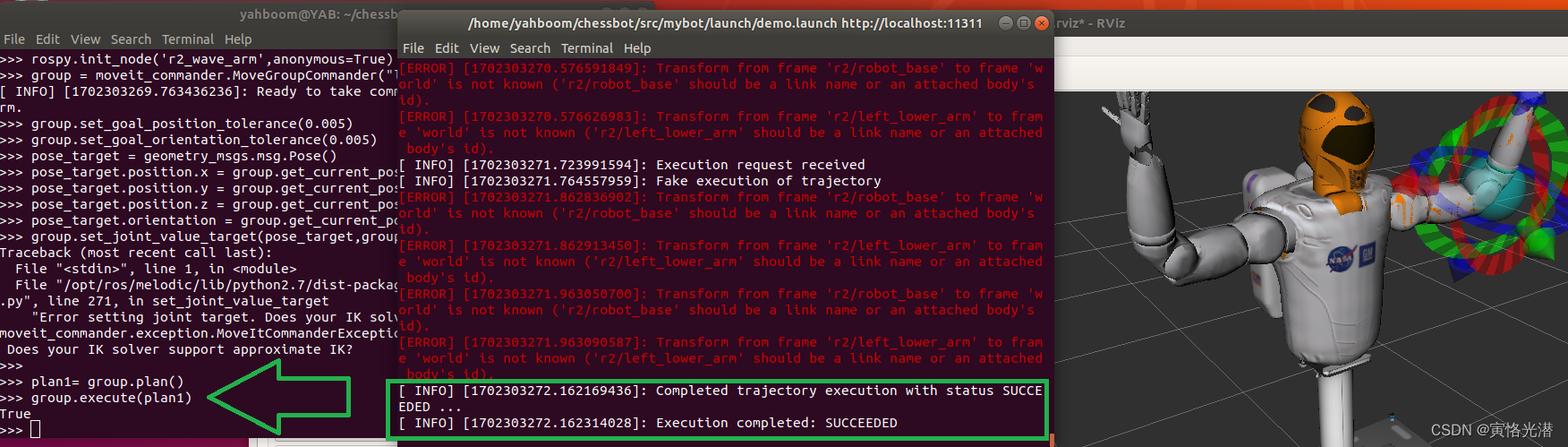
ROS仿真R2机器人之安装运行及MoveIt的介绍
R2(Robonaut 2)是NASA美国宇航局与GM通用联合推出的宇航人形机器人,能在国际空间站使用,可想而知其价格是非常昂贵,几百万美刀吧,还好NASA发布了一个R2机器人的Gazebo模型,使用模型就不需要花钱了,由于我们的机器人软件通常是不依赖于具体机器人的,所以在R2学到的东西也可以应用到其他的机器人身上,所以我们在仿真平台上来操作它。 1、安装R2机器人 1.1、O
ROS MoveIt!
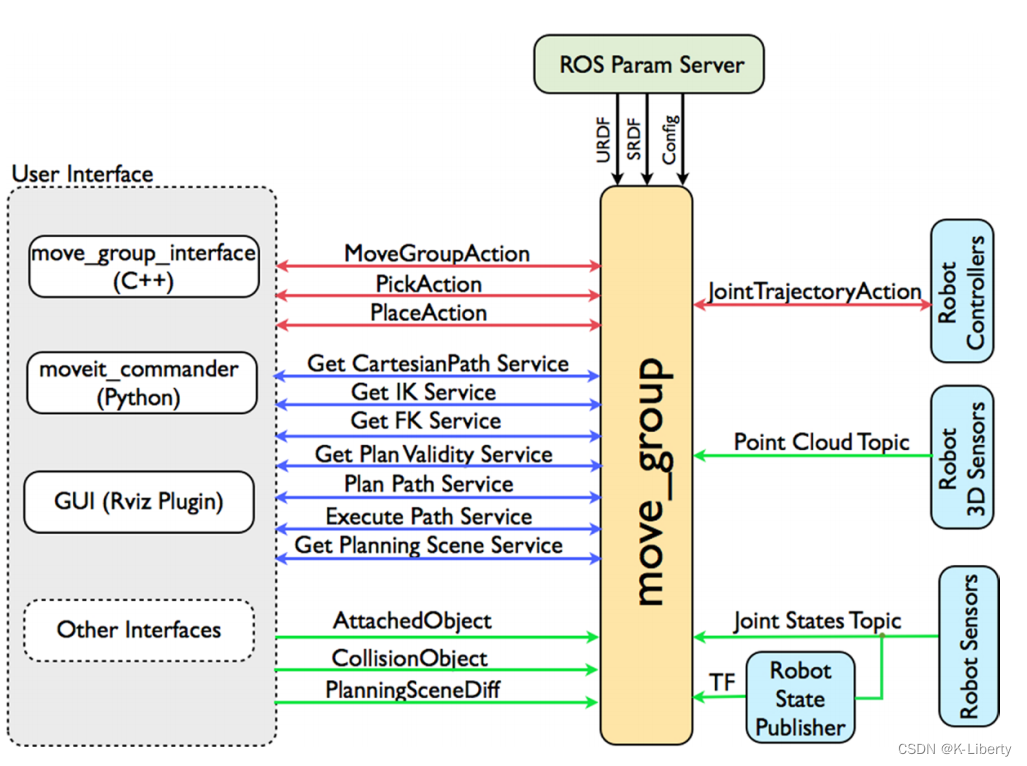
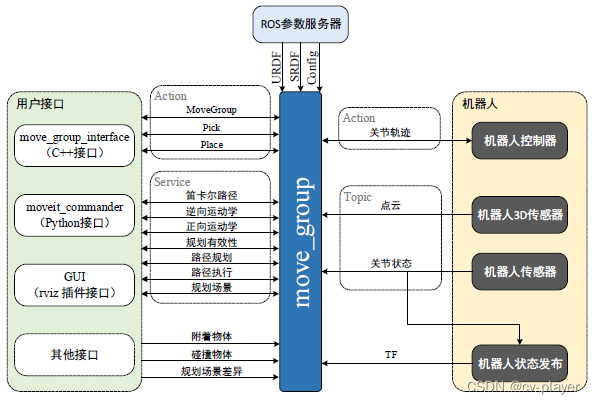
MoveIt!是一个用于ROS的开源运动规划库,提供多种功能,包括用于运动规划的快速逆运动学分析、用于操纵的高级算法、机械手控制、动力学、控制器和运动规划。(通过提供一个GUI来协助MoveIt!所需的各种设置,它允许使用RViz进行视觉反馈。) MoveIt! 组件和模块: MoveGroup:这是MoveIt!的核心节点,负责管理和执行运动规划任务。它提供了许多服务和动作接口供用户

Ubuntu14.04安装MoveIt以及Kinect2驱动的问题
2019年1月15日更新:回头看这篇博客,写的比较乱、冗杂,所以,做了一些修改。 之所以写这篇博客,是因为我在这个上面浪费了两三天时间,算是总结出来一个比较正确的安装流程。 电脑配置:型号:ThinkPad E470,220G固态硬盘,8G内存,双显卡:Intel HD Graphics 620和NVIDIA GeForce 940MX。 系统:Win10与Ubuntu14.04双系统。关于
通过外部程序获得Moveit-Rviz的MotionPlanning面板相同的操控能力
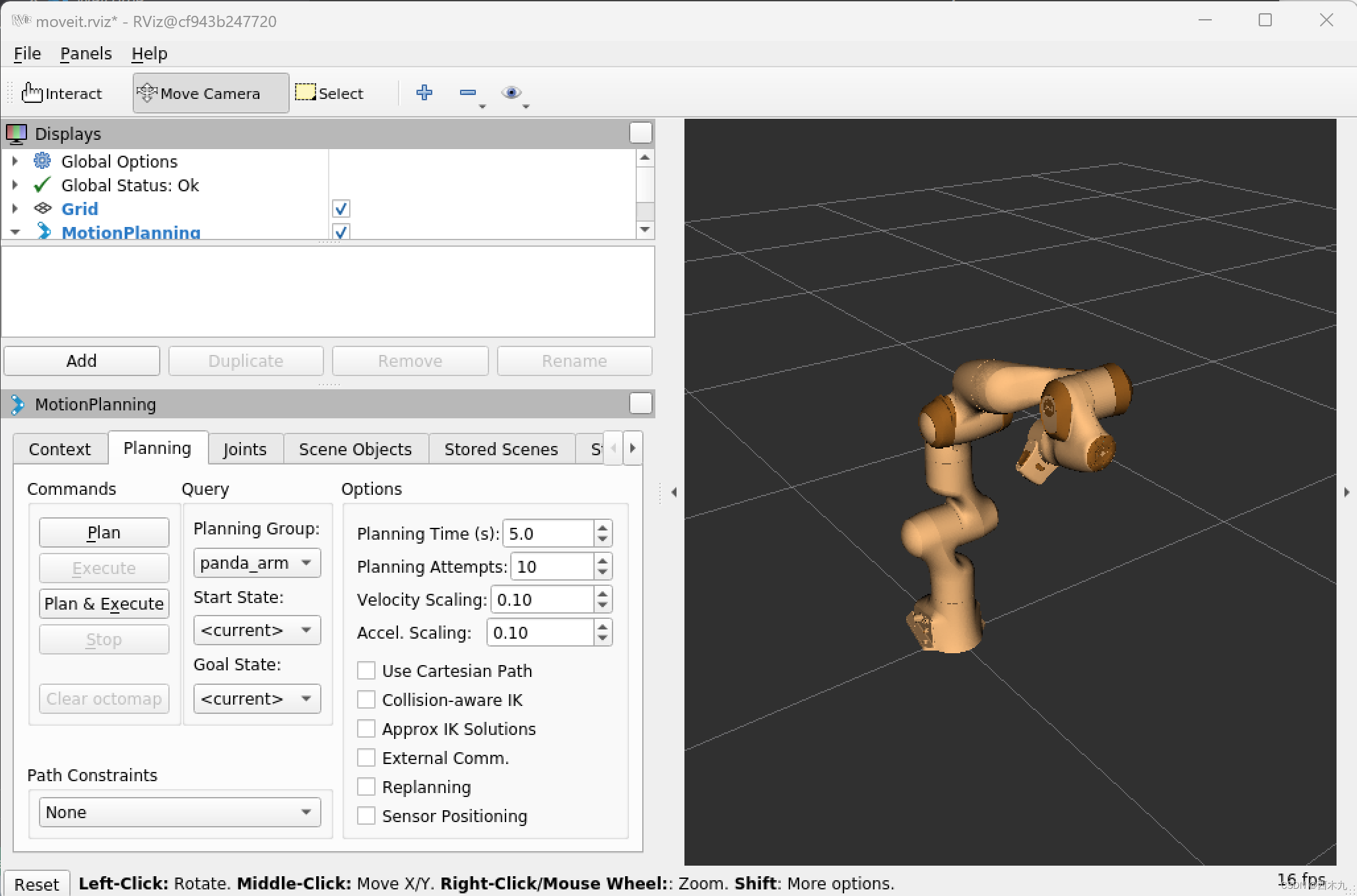
在Moveit-Rviz启动之后,在机器人的末端会显示一个Interactive Marker用来指示目标方位,可以通过鼠标来移动和旋转该Marker,操作时会有一个虚拟的机器人随之运动。当按下MotionPlanning面板中的Plan按钮便会显示从当前方位到目标方位的一个运动轨迹。当按下Execute按钮后机器人就会实际运动到目标方位。 Moveit在rviz中提供的操控Topic 当勾选
![MoveIt教程[19]:IKFast Kinematics Solver](/front/images/it_default.jpg)
MoveIt教程[19]:IKFast Kinematics Solver
在本节中,将介绍为MoveIt配置IKFast插件。 一.What is IKFast 来自Wikipedia: IKFast,机器人运动学编译器,是Rosen Diankov的OpenRAVE运动规划软件中提供的一个强大的逆运动学求解器。与大多数逆运动学求解器不同,IKFast可以解析求解任何复杂运动学链的运动学方程,并生成语言特定的文件[如C++]供以后使用。最终的结果是非常稳定的解决方案,可


Baxter机器人 Moveit!与gazebo学习
第一步,网络设定 编辑网络链接ipv4为与Baxter机器人同一网段,Baxter机器人为10.1.1.12,并启动baxter.sh sim仿真,设置环境。 $ cd ~/ros_ws/$ ./baxter.sh 第二步,启动启动终端,打开Baxter Gazebo,需要导入models,否则模型会很黑 $ roslaunch baxter_gazebo baxter_worl
机器人操作系统ROS(九):MoveIt!与机械臂控制
机器人操作系统ROS(九):MoveIt!与机械臂控制 MoveIt!简介MoveIt!系统架构MoveIt!编程与机械臂控制关节空间规划工作空间规划笛卡尔运动规划避障规划 Pick and Place示例 MoveIt!简介 MoveIt!是在2012年在PR2与多个机械臂功能包的基础上集成得到的ROS软件包,它为开发者提供了一个易于使用的集成化开发平台,由一系列移动操作的功能
睿尔曼超轻量仿人机械臂-ROS第一篇 启动机械臂的Moveit
本文主要讲述了睿尔曼六轴机械臂在ROS中的功能包配置,及如何根据文件启动Moveit做仿真。文中涉及的机械臂ROS包已存放网盘,链接如下: 链接:https://pan.baidu.com/s/1LC0SsoRJ-HOHcFXkN0I1cQ?pwd=xk8f 提取码:xk8f 目录 1. 机械臂ROS包介绍 2. 使用前环境准备 3. 源码的安装编译 4.在rviz中显示机械臂模型

古月居教程之:moveit碰撞检测添加模型
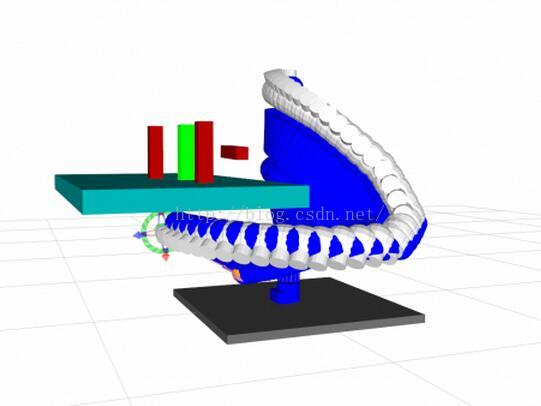
在学习古月的《ROS机器人开发实践》机械臂的10.5.4碰撞检测的时候,发现添加模型的面板和书本上的不同: 书上是点import file,但是这里只有import,我尝试过点import但是会报错,模型加载不出来。 琢磨一番后发现这个面板比书上的功能更全: 他不仅可以加模型,还可以加一些规则的形状: 1.box是正方体盒子,sphere是球体,cylinder是圆柱,cone是圆锥 2.m
![运行moveit_rviz报错 Tried to advertise on topic [/move_group/filtered_cloud] with md5sum [060021388200f](https://img-blog.csdnimg.cn/bab2a6a0d200473a9f027c6dc9adb65b.png)
运行moveit_rviz报错 Tried to advertise on topic [/move_group/filtered_cloud] with md5sum [060021388200f
运行moveit_rviz报错 [ERROR] [1656070551.111682083, 1948.582000000]: Tried to advertise on topic [/move_group/filtered_cloud] with md5sum [060021388200f6f0f447d0fcd9c64743] and datatype [sensor_msgs/Image

MoveIt! 学习笔记8 -Visualizing Collisions(碰撞可视化)(带后续使用的时候添加细节)
此博文主要是用来记录ROS-Kinetic 中,用于机器人轨迹规划的MoveIt功能包的学习记录。 英文原版教程见此链接:http://docs.ros.org/en/kinetic/api/moveit_tutorials/html/doc/move_group_interface/move_group_interface_tutorial.html 引: Visualizing Co

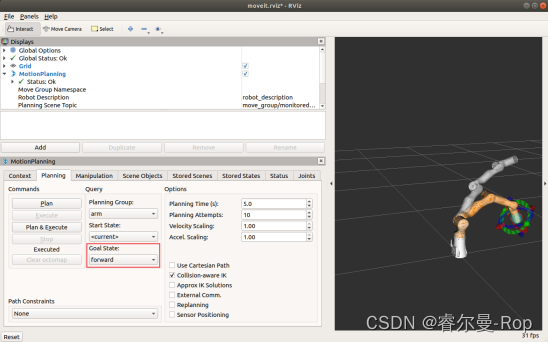
ROS MoveIt运动规划时无法拖动轨迹球的解决方法
问题描述:配置都正确,但是进入motionplanning规划轨迹时,不能拖动轨迹球,只能够用GUI控制各个轴的转角或者选择随机位置 解决方案:勾选Allow Approx IK Solutions(允许近似的运动学逆解方案)
MoveIt!入门教程-目录
转载:http://blog.csdn.net/u014365862/article/details/53444006 网址:http://www.ncnynl.com/category/ros-moveit/1/ ROS与MoveIt 说明 机械臂的运行,在工业利用上非常普及MoveIt软件包,提供全面的利用机械臂的功能包,方便在此基础做出更多的二次开发。此教程在虚拟机上测试可能会有
运动规划 (Motion Planning): MoveIt! 与 OMPL
转载:http://blog.csdn.net/improve100/article/details/50619925 运动规划 (Motion Planning): MoveIt! 与 OMPL 985 9 精华热门 2016-01-22 00:35 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错误怎么解决。
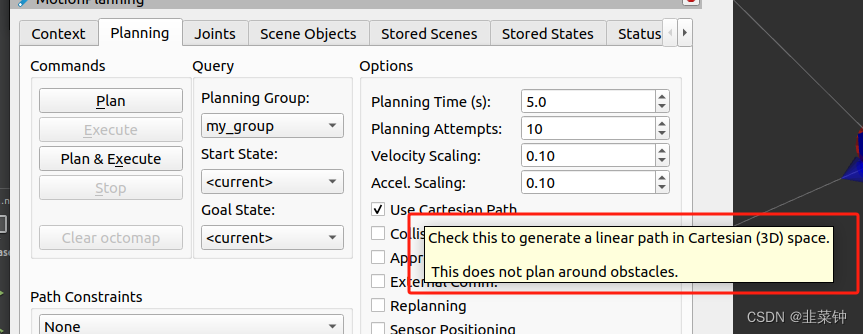
MoveIt的【Use Cartesian Path】选项及computeCartesianPath函数
文章目录 rviz中的【Use Cartesian Path】C++接口中的【computeCartesianPath】!!!特别注意!!! rviz中的【Use Cartesian Path】 在rviz中使用MoveIt时,在MotionPlanning选项卡有一个【Use Cartesian Path】的选项,勾选之后,规划出来的路径是两个移动点的直线路径。 上图中的显示轨

【MoveIt】Chomp和Stomp的配置与使用
文章目录 仿真ChompStomp 这里首先说明,这里使用的验证的是ubuntu18.04环境下的ROS。(16.04下可能会出现不能使用的情况) 机械臂使用的是franka. 如果在使用过程中出现了很多的问题那么大多数原因其实都是因为你没有通过源码安装最新版的moveit。 这里给出一个各种规划器的参考视频->youtube 直接比较在复杂障碍物情况下他们的表现: omp

Moveit学习笔记 (二) ——用建好的urdf模型通过moveit设置助手生成moveit配置文件
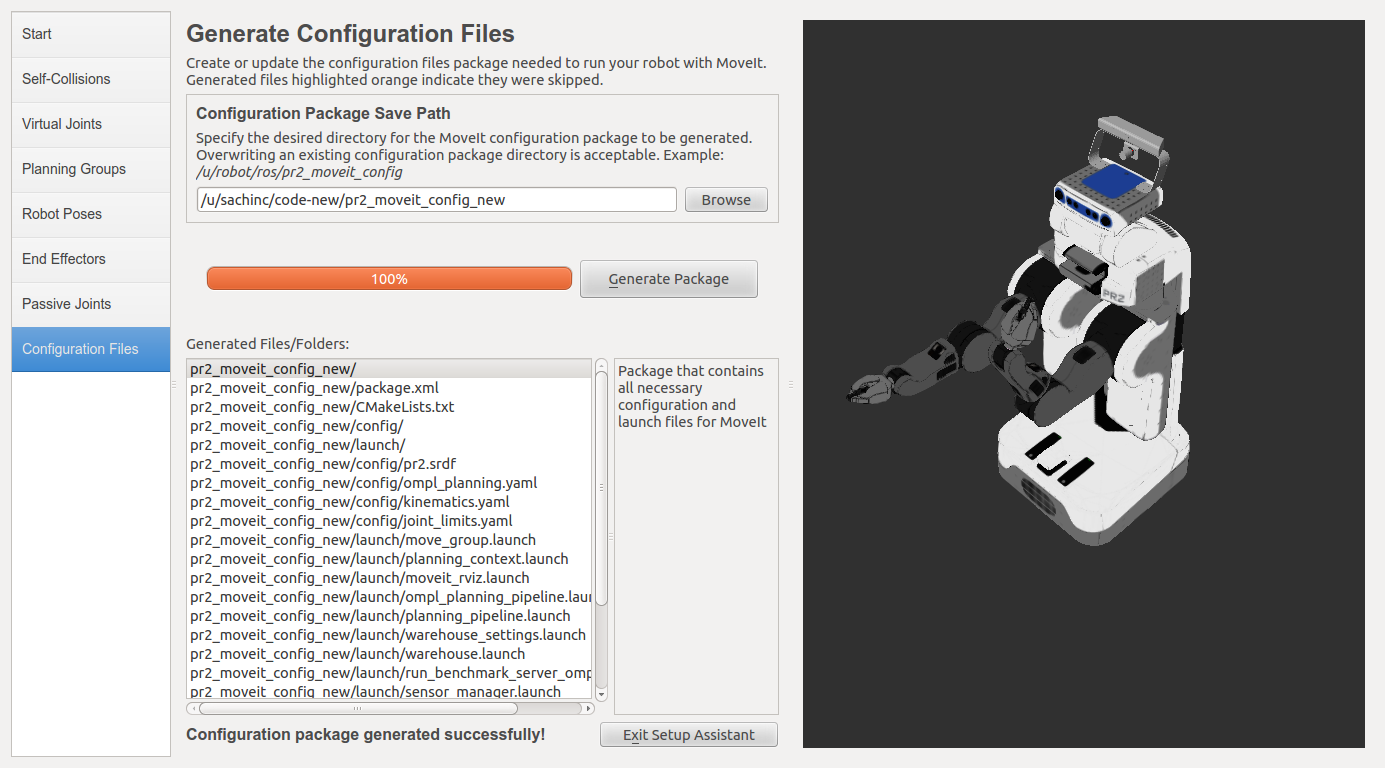
要想使用moveit强大的功能,首先需要准备好moveit所需要的一系列配置文件,srdf格式(包括机器人模型,控制器,外观等等),moveit非常人性化的提供了设置助手帮助我们自动生成这些文件,省的我们自己一条条写。接下来我们就学习怎么用之前建好的urdf模型生成srdf文件 准备工作: 确保已经安装了moveit包 1.启动moveit setup assistant roslaunc