本文主要是介绍ros Moveit学习记录(一) MoveIt Setup Assistant,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ros MoveIt Setup Assistant 记录
- 1. 准备工作
- 2. 使用记录
- a. 打开Moveit! Setup Assistant
- b. *Create New Moveit Configuration* -> 填入`urdf.xacro`的地址
- c. Self-Collisions:全选了即可
- d. Define Virtual Joints
- e. Define Planning Groups
- f. Define Robot Poses
- g. 我的没有 End-Effector,因此`End Effectors`略过。
- h. franka panda不需要Add Passive Joints。
- i. Controllers
- j. Simulation 和 3D Perception 默认即可
- g. Generate Configuration Files
- 结果
最近在学习Moveit。记录一下Moveit Setup Assistant使用过程。
MoveIt Setup Assistant 是一个图形用户界面,用于为任何机器人配置MoveIt使用。它的主要功能是为您的机器人生成Semantic Robot Description Format(SRDF)文件。此外,它还生成其他必要的配置文件,以便与MoveIt pipeline 一起使用。
1. 准备工作
安装moveit (我的ROS版本是 Noetic)
sudo apt-get install ros-noetic-moveit
官方的安装有些复杂,应该这样就可以了。
以franka为例,下载它的description,主要包括 URDF文件和franka部件的meshes。
sudo apt install ros-noetic-franka-description
新建一个workspace
mkdir -p ~/ws_test/src
cd ~/ws_test/src
catkin_init_workspace
2. 使用记录
a. 打开Moveit! Setup Assistant
roslaunch moveit_setup_assistant setup_assistant.launch
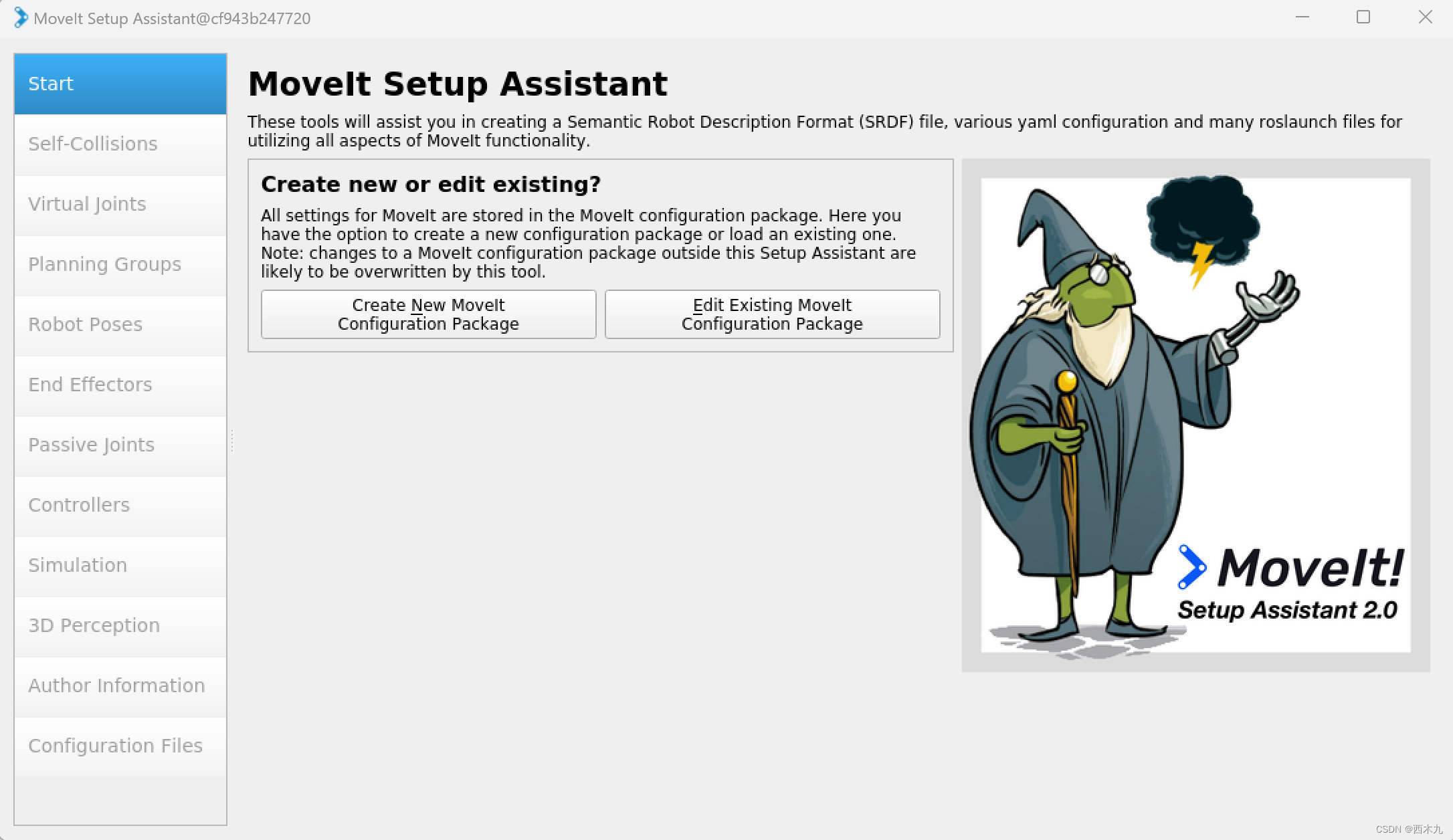
b. Create New Moveit Configuration -> 填入urdf.xacro的地址
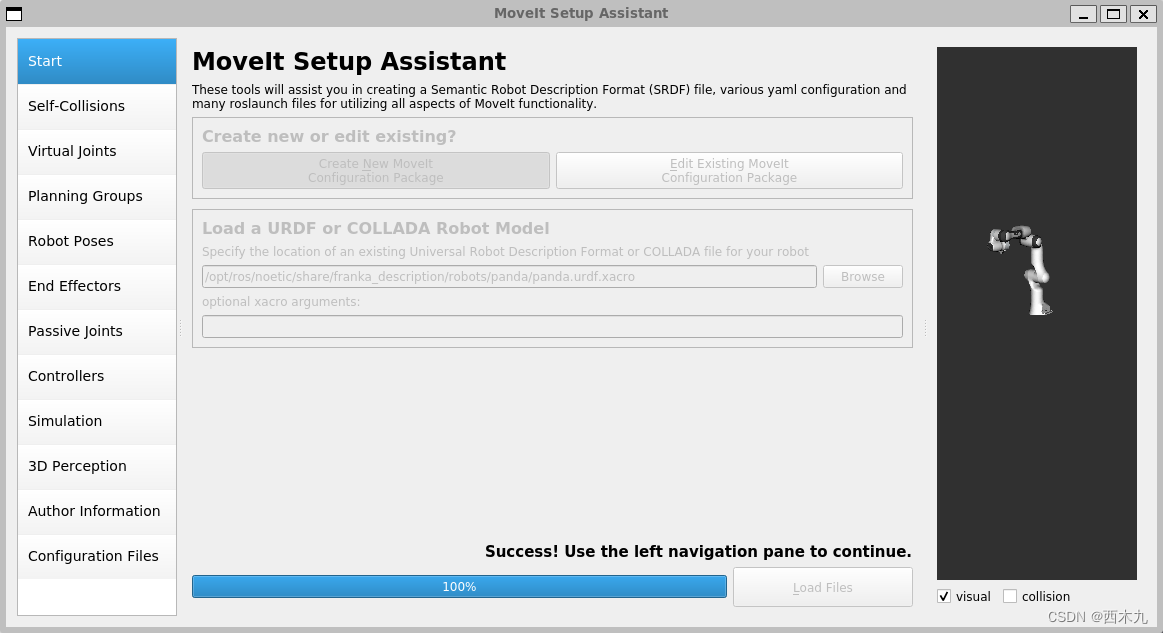
noetic的地址在这里:
/opt/ros/noetic/share/franka_description/robots/panda/panda.urdf.xacro
我的这个默认就没有爪子,后续我会记录爪子的补全过程。
如果找不到可以 find / -name franka_description

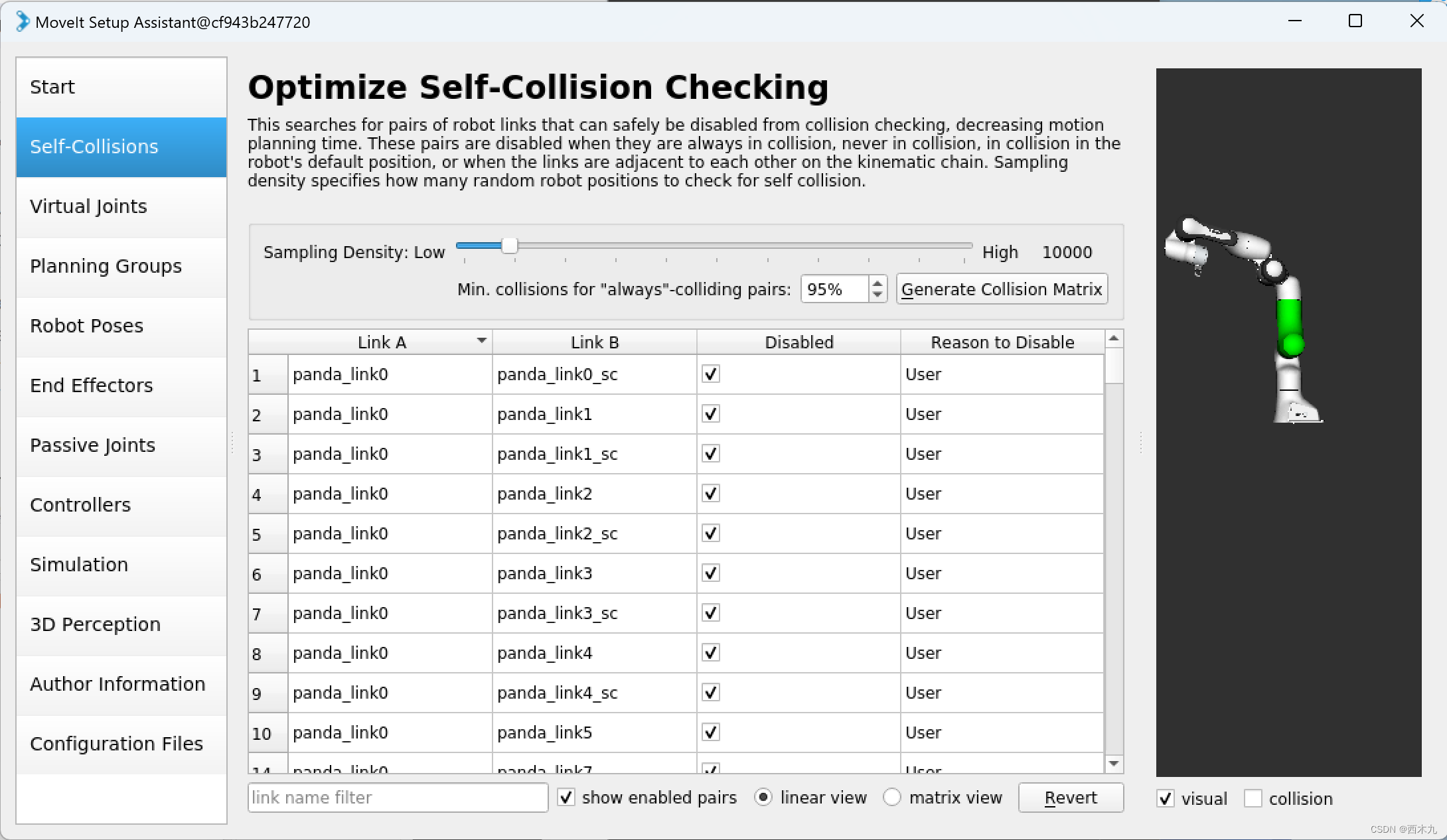
c. Self-Collisions:全选了即可
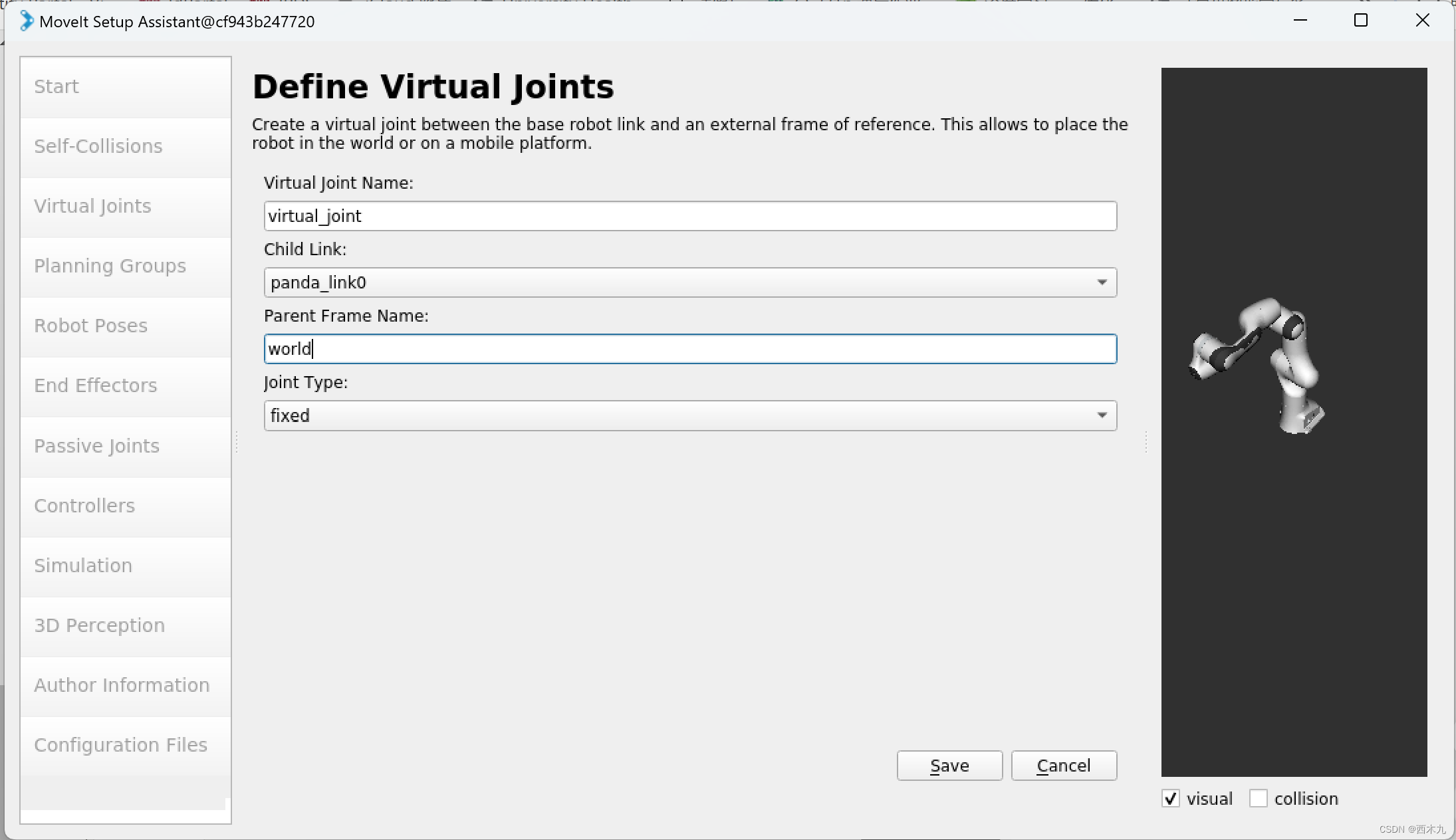
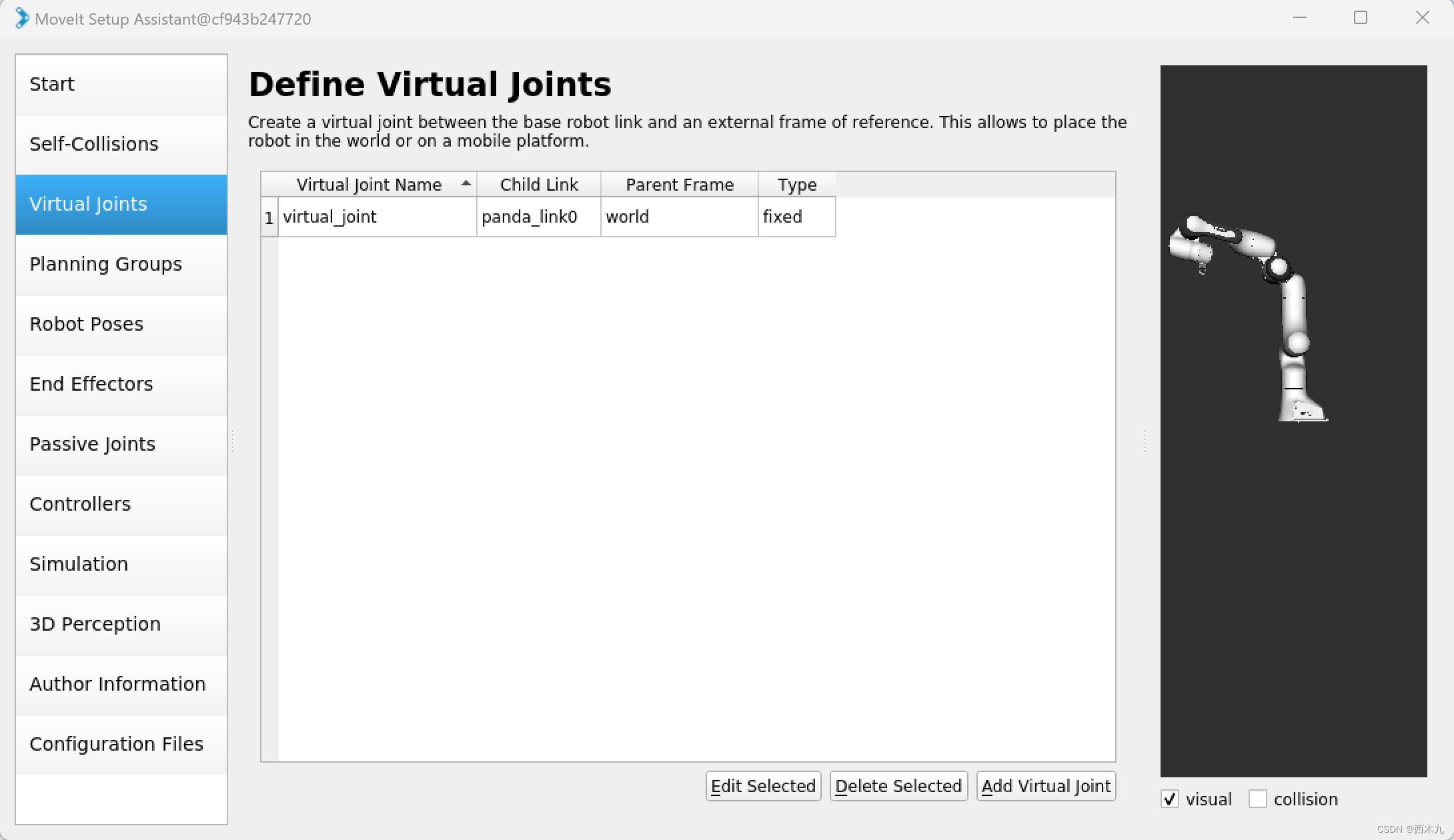
d. Define Virtual Joints
如下图所示
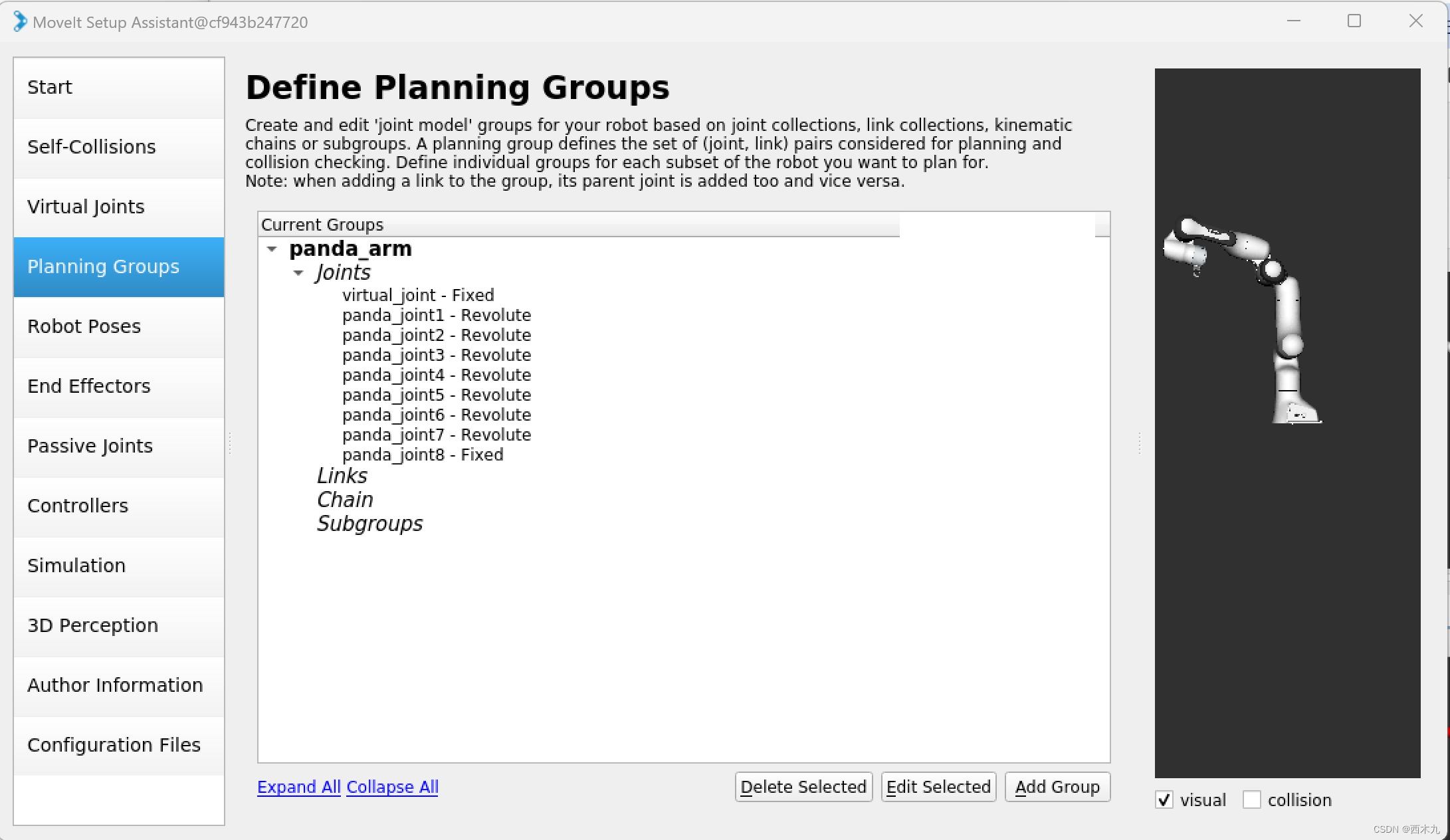
e. Define Planning Groups
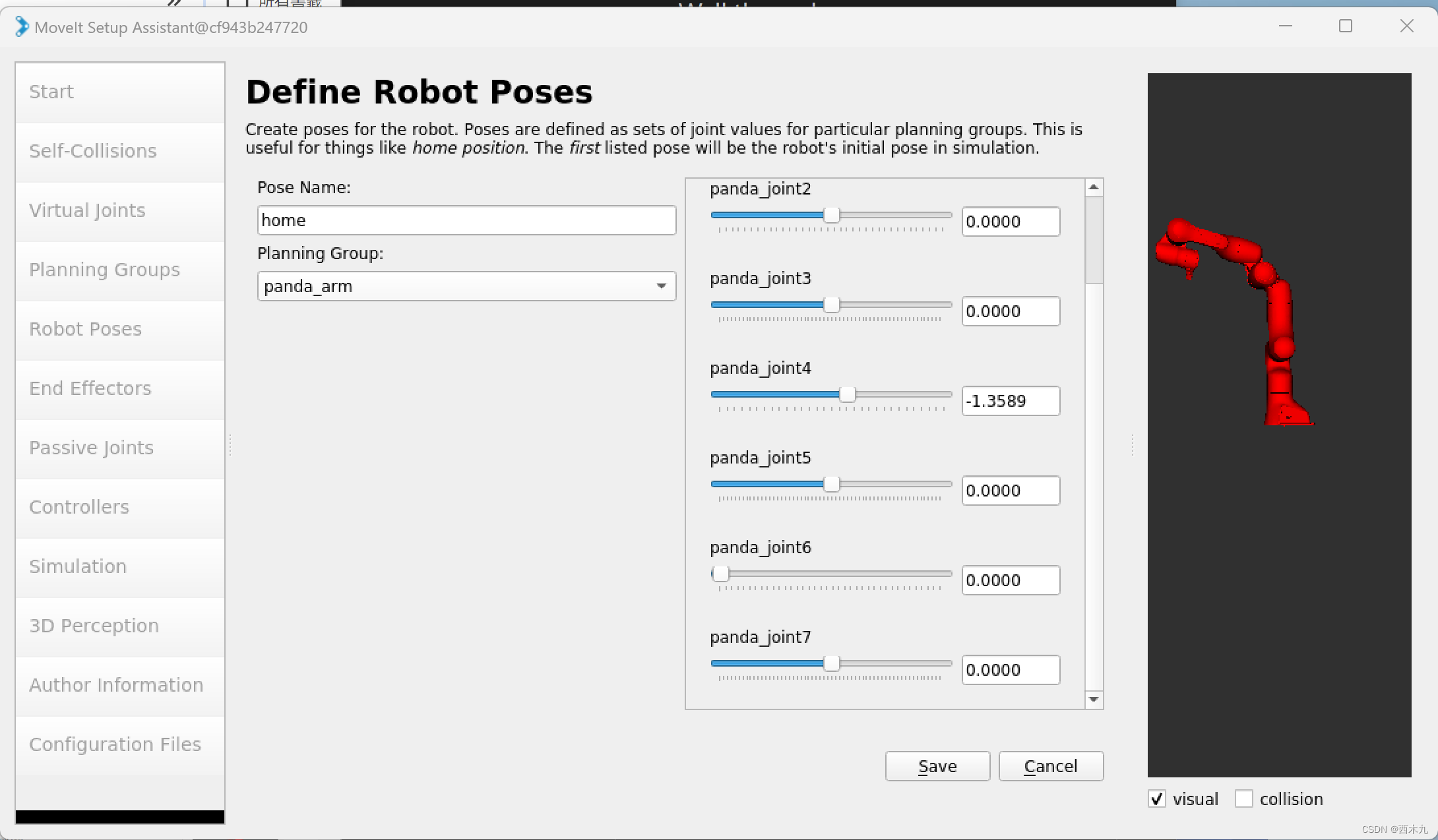
f. Define Robot Poses
g. 我的没有 End-Effector,因此End Effectors略过。
h. franka panda不需要Add Passive Joints。
i. Controllers
忘记截图。
Add Controller->命名arm_position_controller-> 选择controller type position_controllers/JointPositionController->Add Planning Group Joints -> Save
j. Simulation 和 3D Perception 默认即可
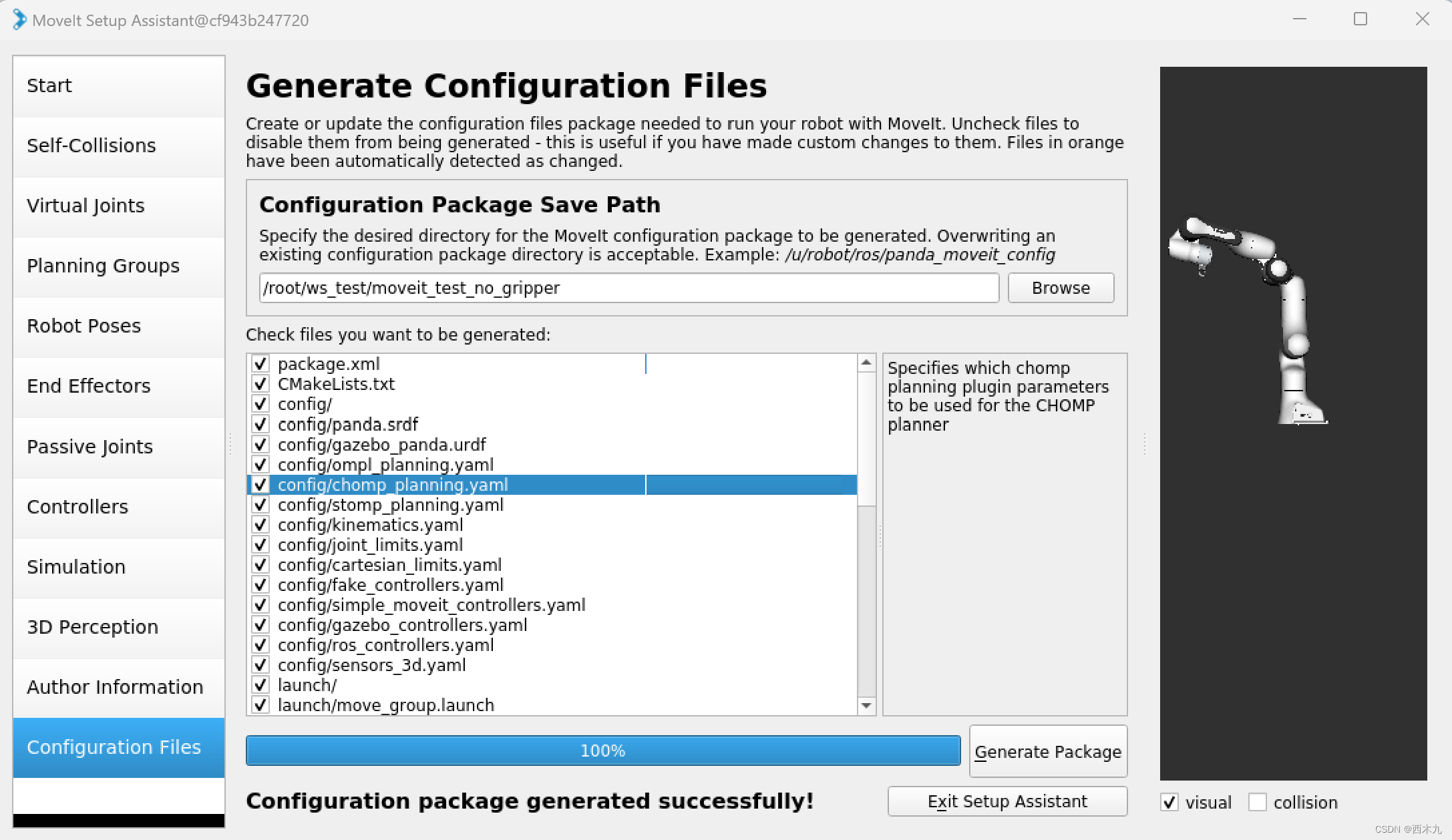
g. Generate Configuration Files
此处我的地址设置有误,若设为/root/ws_test/src/moveit_test_no_gripper会更好。
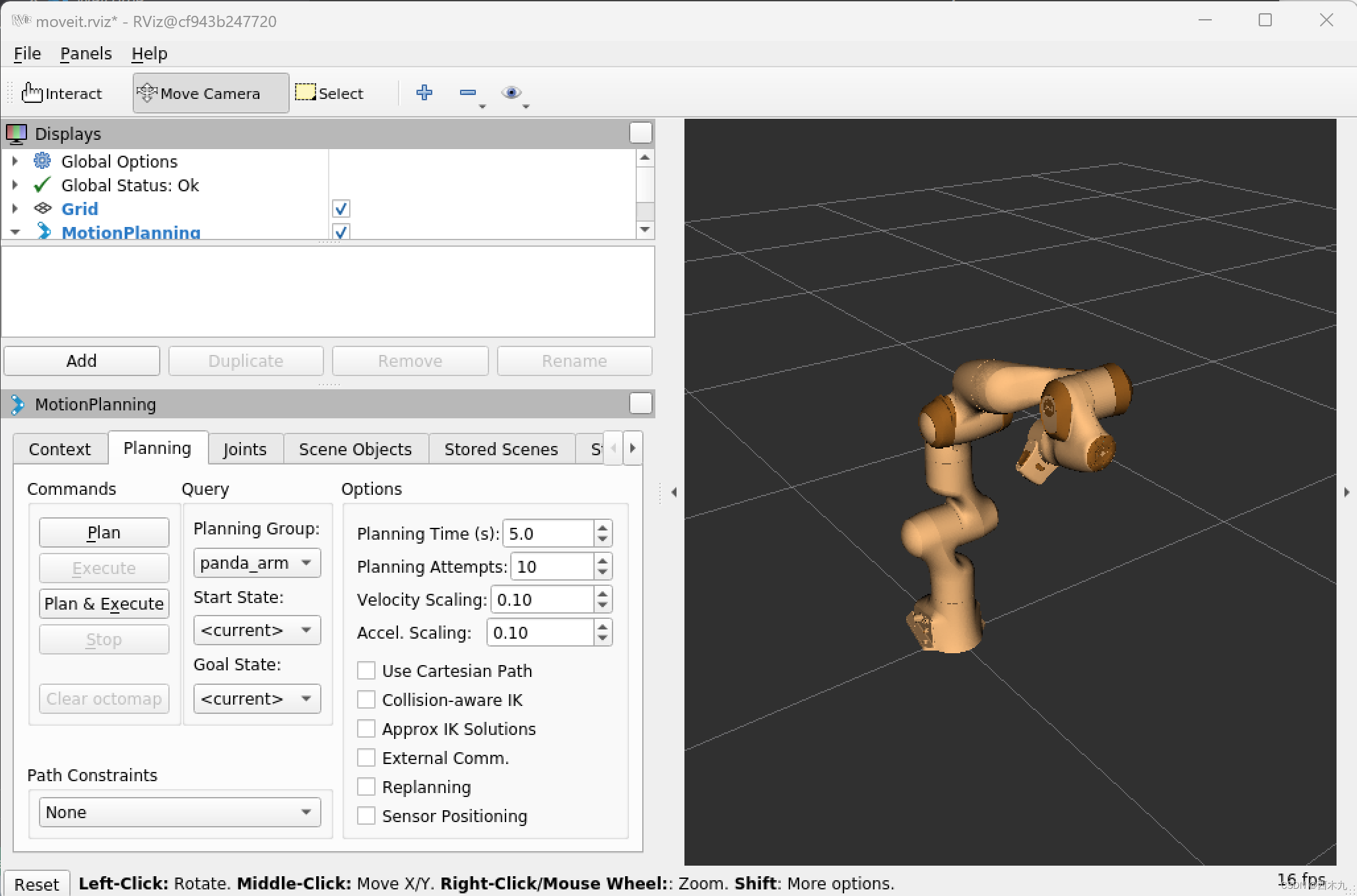
结果
可以看到ws_test下生成了文件夹
此时运行rviz会出错
roslaunch moveit_setup_assistant setup_assistant.launch
把moveit_test_no_gripper移到src下catkin_build后source devel/setup.bash再次运行就可以成功了。
这篇关于ros Moveit学习记录(一) MoveIt Setup Assistant的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




