本文主要是介绍MoveIt的【Use Cartesian Path】选项及computeCartesianPath函数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- rviz中的【Use Cartesian Path】
- C++接口中的【computeCartesianPath】
- !!!特别注意!!!
rviz中的【Use Cartesian Path】
在rviz中使用MoveIt时,在MotionPlanning选项卡有一个【Use Cartesian Path】的选项,勾选之后,规划出来的路径是两个移动点的直线路径。
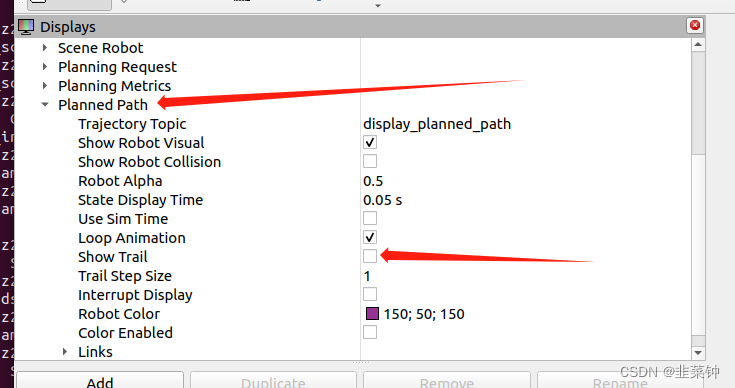
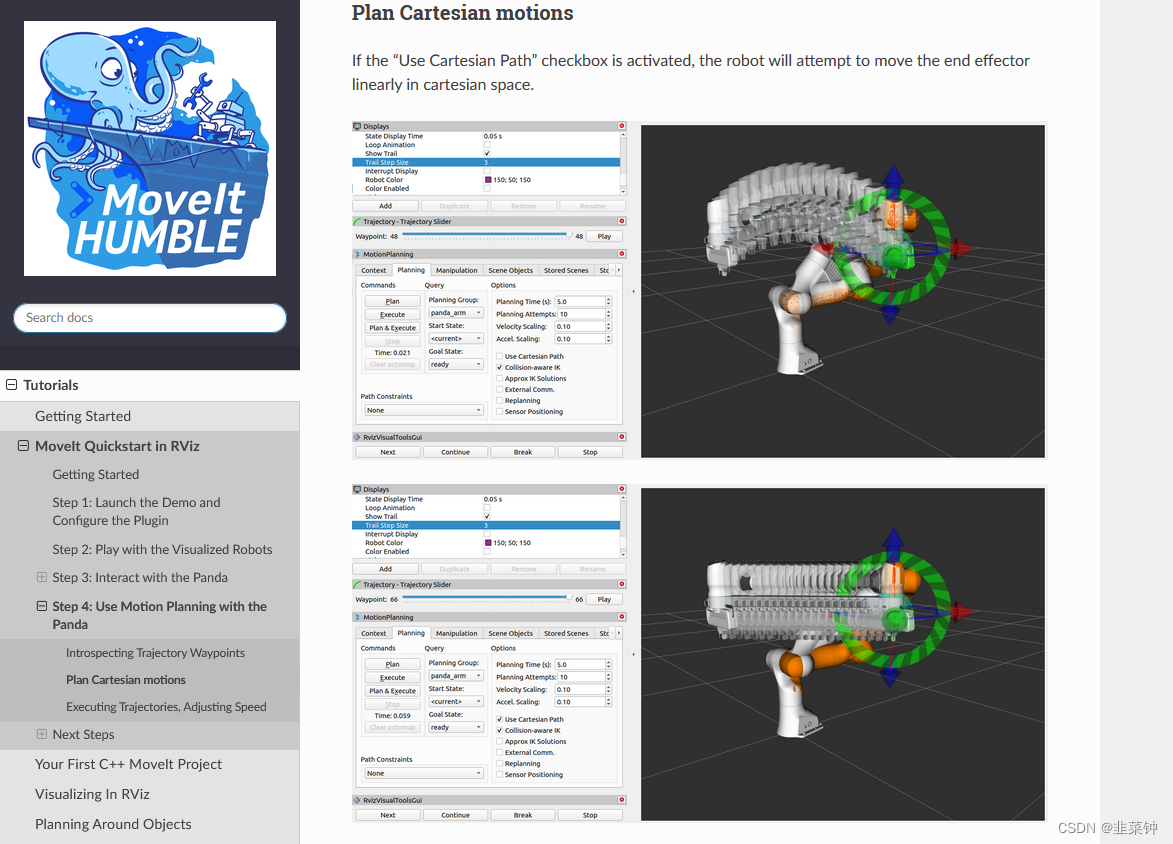 上图中的显示轨迹的选项在【MotionPlanning–>Planned Path–>Show Trail】:
上图中的显示轨迹的选项在【MotionPlanning–>Planned Path–>Show Trail】:
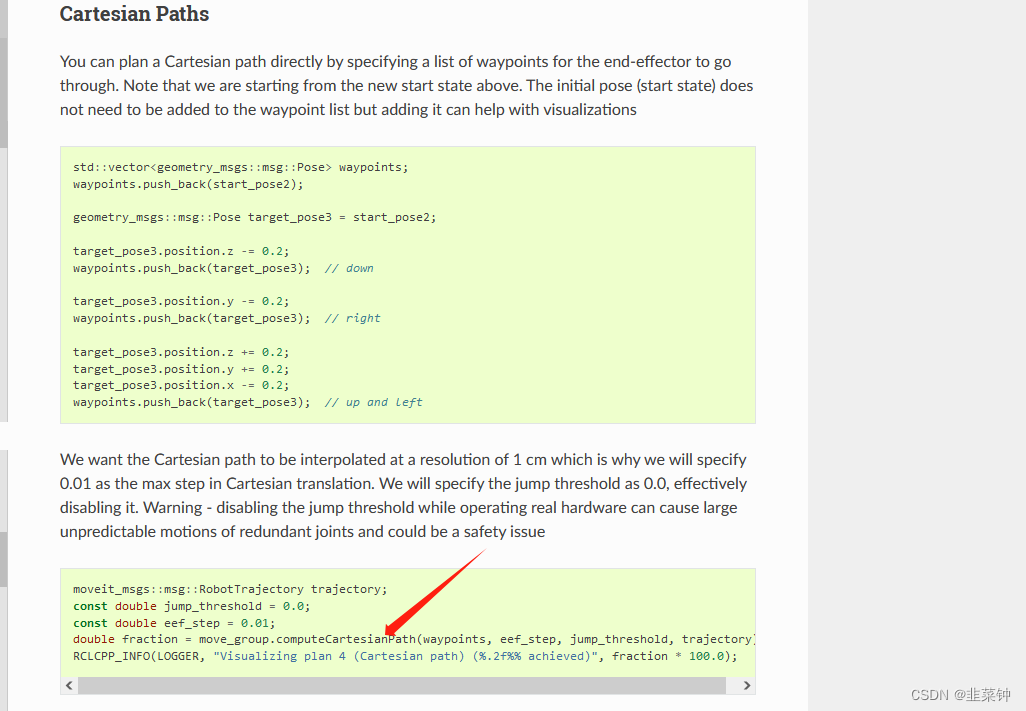
C++接口中的【computeCartesianPath】
在moveIt的c++接口中,也有对应的一条函数【computeCartesianPath】,功能也是一样的:
!!!特别注意!!!
需要特别注意的是,此种方式规划出来的路径是不进行碰撞外部检测的,也就是不会避障。
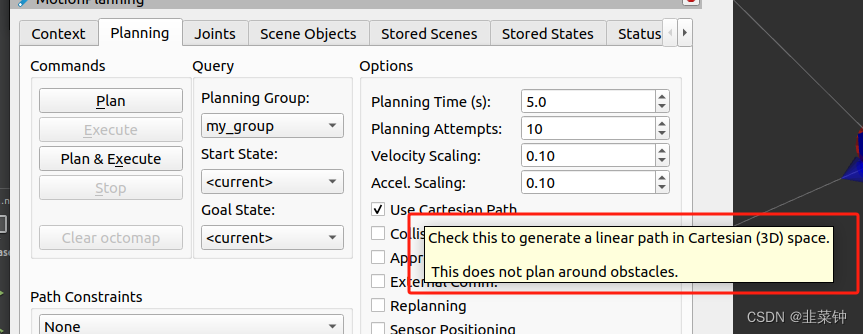
Check this to generate a linear path in Cartesian (3D) space. This does not plan around obstacles.
勾选此项以在笛卡尔(3D)空间中生成一条线性路径。此举将不考虑避开障碍物。
参考:
【MoveIt Quickstart in RViz】
【Move Group C++ Interface】
这篇关于MoveIt的【Use Cartesian Path】选项及computeCartesianPath函数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




