lio专题

【LVI-SAM】激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节
激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节 1. 特征提取实现过程总结1.0 特征提取过程小结1.1 类 `FeatureExtraction` 的整体结构与作用1.2 详细特征提取的过程1. 平滑度计算(`calculateSmoothness()`)2. 标记遮挡点(`markOccludedPoints()`)3. 特征提取(`extractF

IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
更多优质内容,请关注公众号:智驾机器人技术前线 1.论文信息 论文标题:IGE-LIO: Intensity Gradient Enhanced Tightly-Coupled LiDAR-Inertial Odometry 作者:Ziyu Chen, Hui Zhu, Biao Yu, Chunmao Jiang, Chen Hua, Xuhui Fu and Xinkai Kuan

LIO-SAM: 紧耦合的激光与惯导里程计方案
点云PCL免费知识星球,点云论文速读。 标题:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 作者:Tixiao Shan, Brendan Englot, Drew Meyers, Wei Wang, Carlo Ratti, and Daniela Rus 来源:分享者 欢迎各位加入免费知识

ubuntu18.04 配置 mid360并测试fast_lio
1.在买到Mid360之后,我们可以看到mid360延伸出来了三组线。 第一组线是电源线,包含了红色线正极,和黑色线负极。一般可以用来接9-27v的电源,推荐接12v的电源转换器,或者接14.4v的电源转换器。 第二组线是信号线,共5根线,包含了2根pps线,秒脉冲;包含了2根GPS信号输入和GPS信号输出线,和一根地线。 第三组线是数据线,是一个网线,直接连接笔

Point-LIO:鲁棒高带宽激光惯性里程计
1. 动机 现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。 2. 主要贡献 1) 提出了一种逐

镭神雷达在lio-sam中使用的数据格式修改
有两点修改,一、重新定义点云类型,二、修改点云时间 重新定义点云类型 // leishen lidarstruct LeiShenPointXYZIRT {PCL_ADD_POINT4DPCL_ADD_INTENSITY;uint16_t ring;double time;EIGEN_MAKE_ALIGNED_OPERATOR_NEW} EIGEN_ALIGN16;POINT
LIO-EKF: 运行数据UrbanNav与mid360设备详细教程
一、代码连接 代码下载连接: YibinWu/LIO-EKF: Maybe the simplest LiDAR-inertial odometry that one can have. (github.com) 编译步骤: cd srcgit clone git@github.com:YibinWu/LIO-EKF.gitcatkin_makesource devel/setup.bas

lio-sam建图实现
参考:https://blog.csdn.net/unlimitedai/article/details/107378759 https://blog.csdn.net/weixin_44126988/article/details/131654142?ops_request_misc=&request_id=&biz_id=102&utm_term=lego-loam%E5%BB%BA%E5%
lio_sam+move_base导航仿真实现
文章目录 在仿真中使用lio_sampoint_cloud转laser_scan三维点云转二维栅格地图move_base参数配置 在仿真中使用lio_sam 参考https://py1995.blog.csdn.net/article/details/137286327?spm=1001.2014.3001.5502 point_cloud转laser_scan 参考ht
经典文献阅读之--LOG-LIO(高效局部几何信息估计的激光雷达惯性里程计)
0. 简介 局部几何信息即法线和点分布在基于激光雷达的同时定位与地图构建(SLAM)中是至关重要,因为它为数据关联提供了约束,进一步确定了优化方向,最终影响姿态的准确性。然而即使在使用KD树或体素图的辅助下,估计法线和点分布也是耗时的任务。为了实现快速法线估计,《LOG-LIO: A LiDAR-Inertial Odometry with Efficient Local Geometric I
ubuntu20.04 运行 lio-sam 流程记录
ubuntu20.04 运行 lio-sam 一、安装和编译1.1、安装 ROS11.2、安装 gtsam1.3、安装依赖1.4、下载源码1.5、修改文件1.6、编译和运行 二、官方数据集的运行2.1、casual_walk_2.bag2.2、outdoor.bag、west.bag2.3、park.bag 三、一些比较好的参考链接 记录流程,方便自己快速复现 一、安装和编译
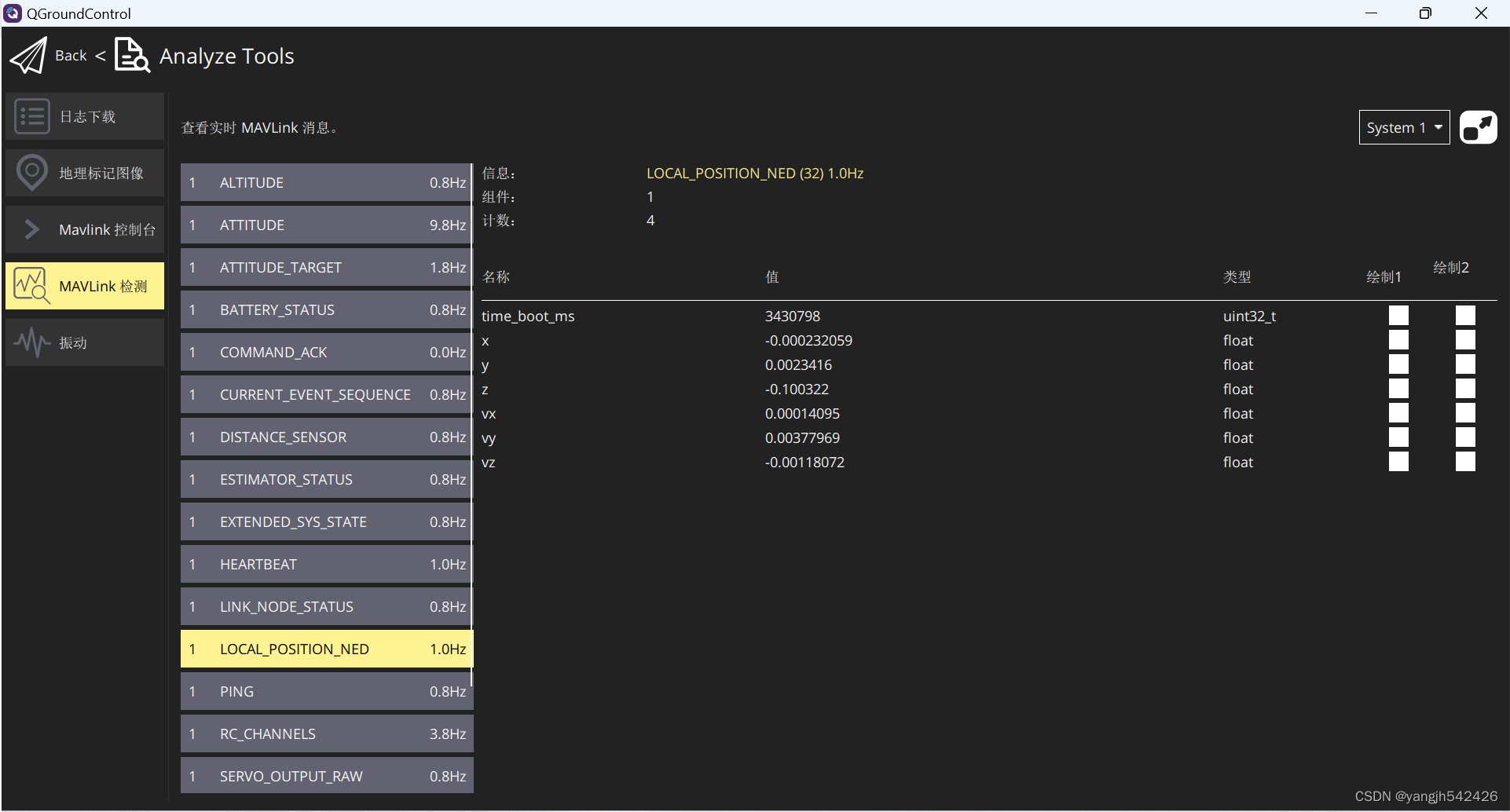
PX4|基于FAST-LIO mid360的无人机室内自主定位及定点悬停
目录 前言环境配置运行fast-lio修改px4位置信息融合方式编写位置坐标转换及传输节点 前言 在配置mid360运行环境后,可使用mid360进行室内的精准定位。 环境配置 在livox_ros_driver2的上级目录src下保存fast-lio的工程 git clone https://github.com/hku-mars/FAST_LIO.gitcd FAST

LIO-SAM 安装 编译 学习记录
一.准备工作 1源码: 1.1加速mirrors / TixiaoShan / LIO-SAM · GitCode 1.2原版GitHub - TixiaoShan/LIO-SAM: LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 2依赖 3编译 cd ~/catkin_ws/src
IMU+激光雷达融合使用LIO-SAM建图学习笔记——详细、长文、多图、全流程
第一章 前言 写在前面:本文适用于任何想要学习并复现、完成LIO-SAM实地建图的朋友,以下内容全部都是我跟着网络上各个教程,最后成功完成建图的过程记录,文章中包括常规步骤以及报错解决办法等,关于原理则很少涉及。另外本人也是刚刚接触这个领域的小白,只会照猫画虎,因此文章中难免存在不足之处,欢迎批评指正,如有侵权联系删除。 1、先决条件 下面是我建图的一些软件、
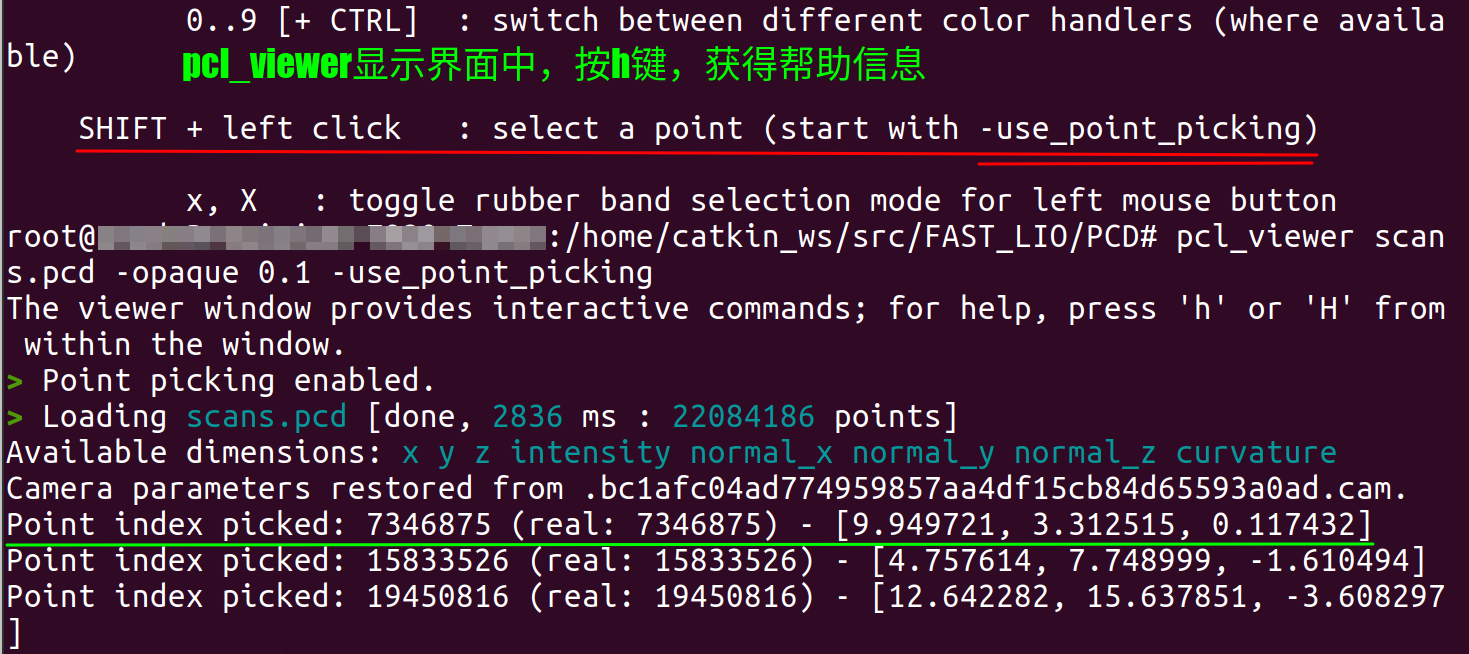
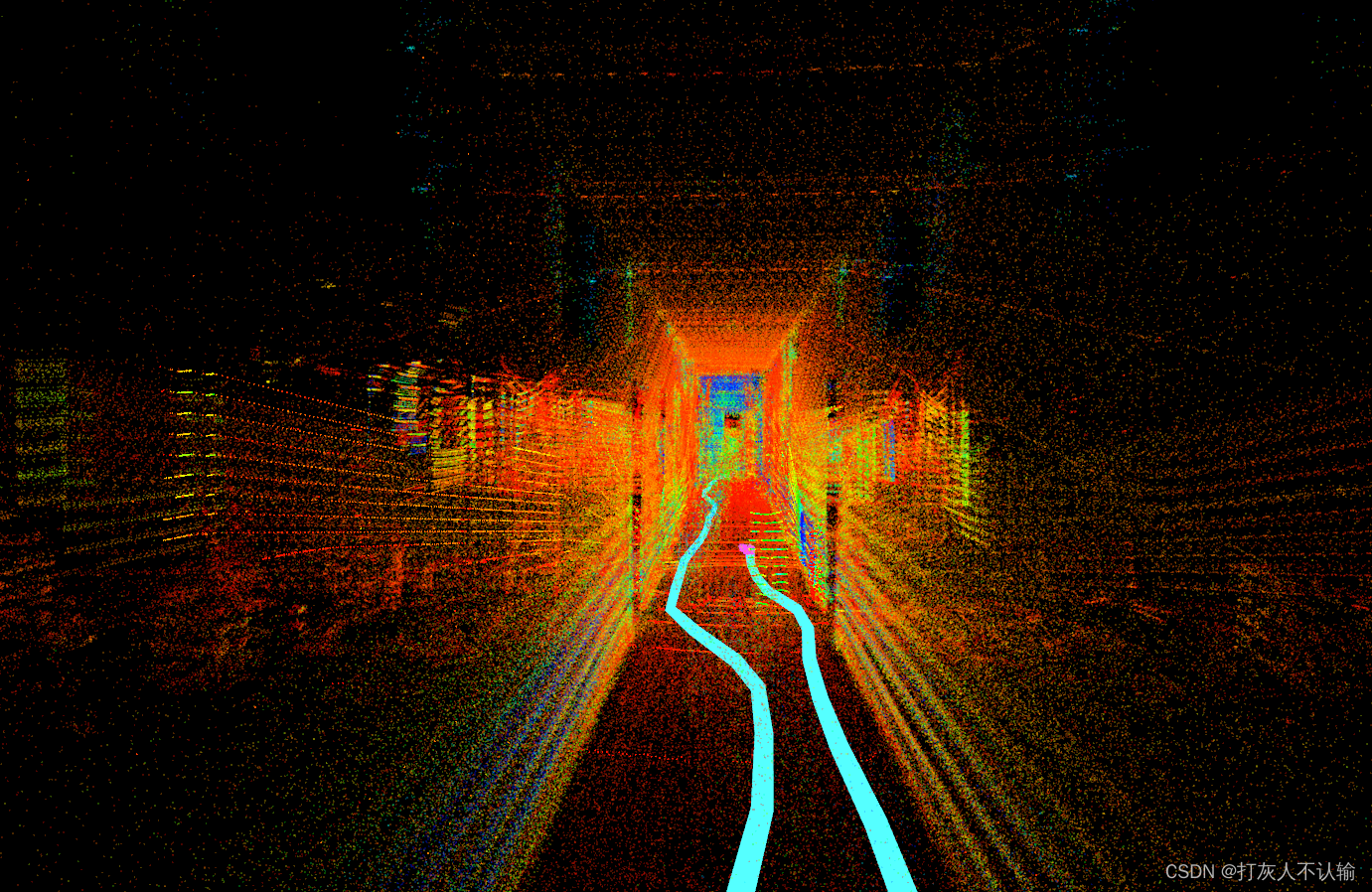
Docker 环境下运行 Fast_LIO 进行三维建模的前/后处理设置
Title: Docker 环境下运行 Fast_LIO 进行三维建模的前/后处理设置 文章目录 前言I. 扫图获取点云数据一. Fast_LIO 扫图注意事项二. 扫图操作脚本命令三. 扫图时 Rviz 显示问题 II. Docker 的安装、配置与运行一. 安装 Docker二. 创建 Docker 层三. 启动容器1. 第一个容器终端2. 第二个容器终端 四. 在 Docker 和宿
《LIO-SAM阅读笔记》IMU作用总结
LIO-SAM作为一个Lidar和IMU为主的紧耦合框架,两者缺一不可,这里总结一下LIO-SAM中IMU起到的作用: 1.利用当前帧Lidar里程计作为起点,结合IMU预积分,得到IMU里程计信息。 此处IMU里程计是以IMU的频率向外发送位姿估计,提高了SLAM系统里程计的发送频率。 2.利用IMU预积分对Lidar每帧点云进行运动去畸变。 3.利用IMU里程计信息对Lidar每
《LIO-SAM阅读笔记》-为何要引入增量式里程计?
前言: LIO-SAM在后端中同时维护着两个里程计,一个是增量式里程计,一个是优化后的里程计,其中优化后的里程计是经过imu、回环、gps因子图联合优化后的结果,是整个系统中最准确的位姿估计,那么为什么还需要维护增量式里程计呢? 以下是我的理解,不一定正确,如有错误,或者不一样的见解欢迎在评论区留言讨论。 我认为最主要的原因(或者是最大的用途)是需要用增量式里程计信息结合imu预积分信息
《LIO-SAM阅读笔记》3.后端优化
前言: LIO-SAM后端优化部分写在了mapOptimization.cpp文件中,本部分主要进行了激光帧的scan-to-map匹配,回环检测以及关键帧的因子图优化。本部分主要有两个环节同步进行,一个单独开辟了回环检测线程,另外一个是lidar数据的回调函数。 功能简介: 1、scan-to-map匹配:提取当前激光帧特征点(角点、平面点),局部关键帧map的特征点,执行scan-to-
《LIO-SAM阅读笔记》1.IMU预积分模块
前言: LIO-SAM是一个多传感器融合的紧耦合SLAM框架,融合的传感器类型有雷达、IMU和GPS,其中雷达和IMU在LIO-SAM框架中必须使用的。LIO-SAM的优化策略采用了GTSAM库,GTSAM库采用了因子图的优化方法,其提供了一些列C++的外部接口,以便用户方便传入参数等进行优化。特别的是GTSAM库专门单独设计关于IMU计算与优化的接口。 IMU
《LIO-SAM阅读笔记》1.IMU预积分模块
前言: LIO-SAM是一个多传感器融合的紧耦合SLAM框架,融合的传感器类型有雷达、IMU和GPS,其中雷达和IMU在LIO-SAM框架中必须使用的。LIO-SAM的优化策略采用了GTSAM库,GTSAM库采用了因子图的优化方法,其提供了一些列C++的外部接口,以便用户方便传入参数等进行优化。特别的是GTSAM库专门单独设计关于IMU计算与优化的接口。 IMU
ubuntu20.04使用LIO-SAM对热室空间进行重建
一、安装LIO-SAM 1.环境配置 默认已经安装过ros sudo apt-get install -y ros-Noetic-navigationsudo apt-get install -y ros-Noetic-robot-localizationsudo apt-get install -y ros-Noetic-robot-state-publisher 安装 gtsam(
8.ROS的TF坐标变换(二):动态坐标变换、多坐标变换代码讲解(以LIO-SAM为例)
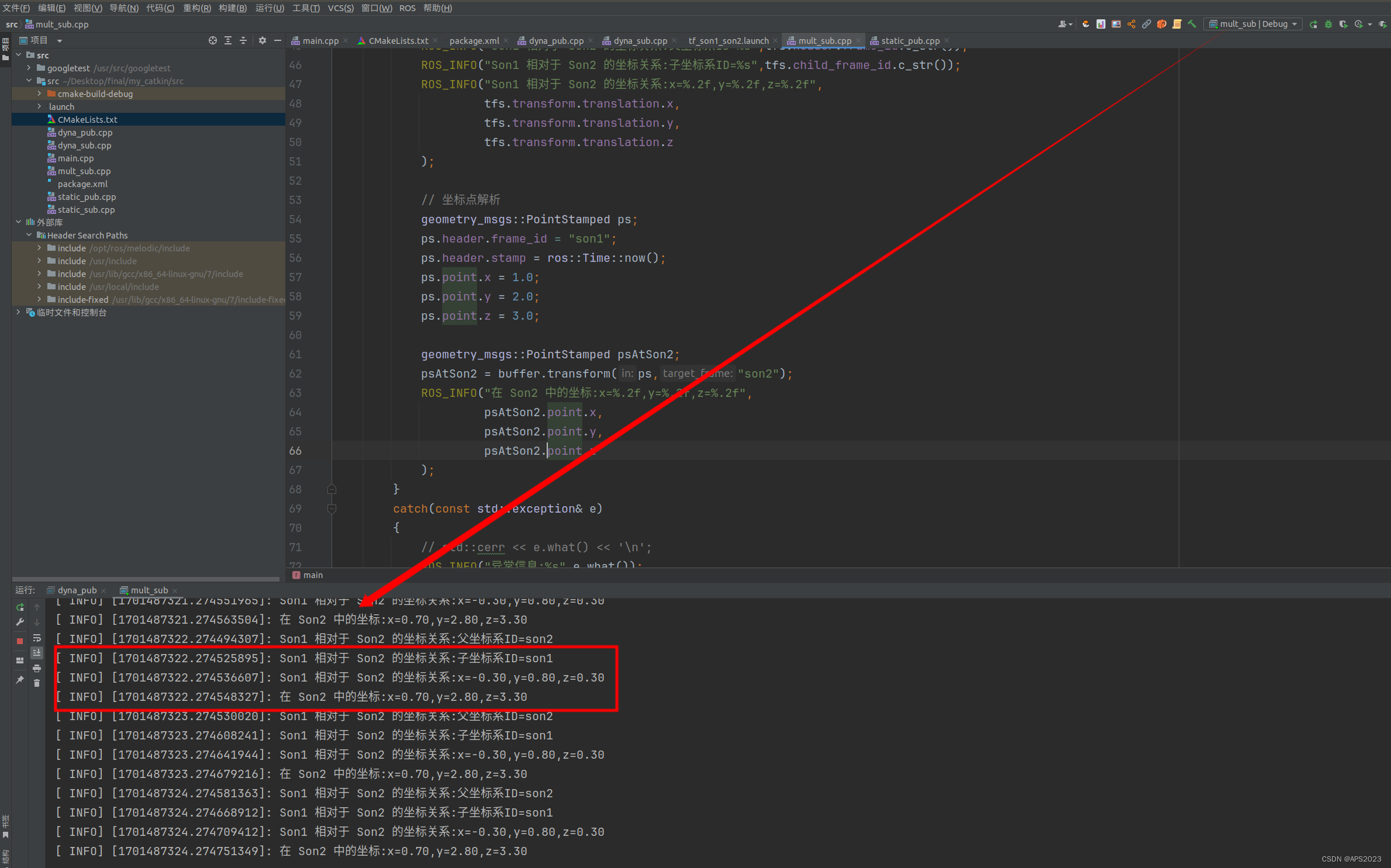
目录 1 ROS的动态坐标变换及代码解释 1.1 什么是ROS的动态坐标变换 1.2 CMakeLists.txt、package.xml基础配置 1.3 发布方代码实现 1.4 接收方代码实现 2 ROS的多坐标变换及代码解释 2.1 什么是ROS的多坐标变换 2.2 发布方代码实现 2.3 接收方代码实现 3 LIOSAM中所有的TF坐标变换代码解

Ubuntu18.04安装LIO-SAM保姆级教程
目录 1 LIO-SAM的安装前要求 1.1 ROS安装:参考我的另一篇博客 1.2 gtsam安装(参考LeGO-LOAM 1.2节) 2 安装 2.1 建立catkin工作空间(我取名为LIO-SAM) 2.2 建立src文件夹 2.3 编译 3 运行LIO-SAM 系统环境:Ubuntu18.04.6 LTS 1 LIO-SAM的安装前要求 1.1 ROS安装
实验室小车跑开源LIO_SAM激光SLAM算法流程(IMU,雷达等串口配置)
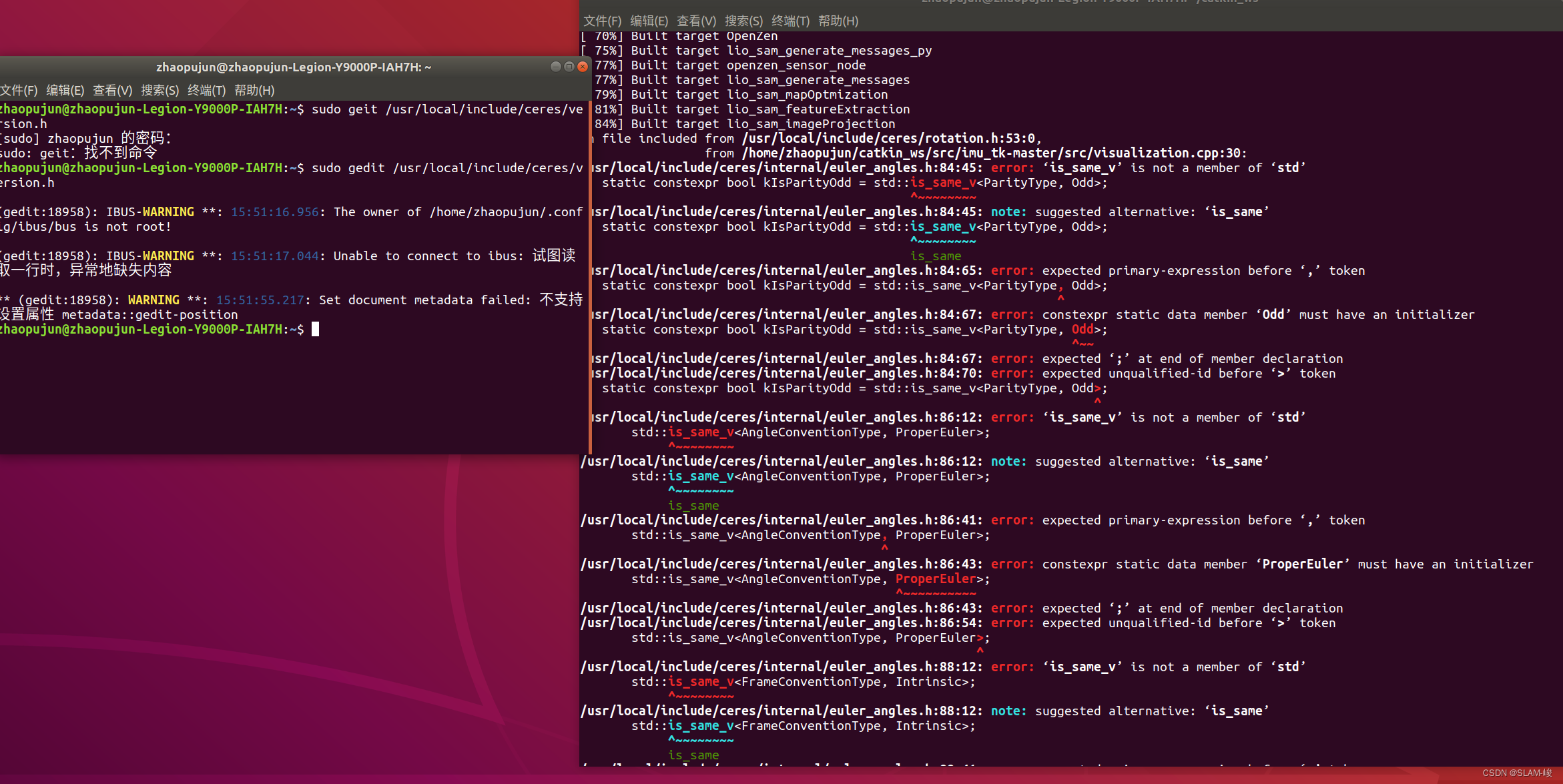
目录 1. IMU设置 2.雷达设置 3.修改配置 4.启动4个launch文件 imu节点 LIDAR节点 LIDAR数据转换节点 LIO_SAM节点 5.最终建图效果 6.推测漂移的原因 7.相关报错 一.imu_tk标定时出现的错误(一大堆错误,类似语法问题) 1. IMU设置 开源标定包标定imu,标定结果修改配置文件 ros读imu数据_好人cc的博客-

【LIO-SAM 跑自录数据集】
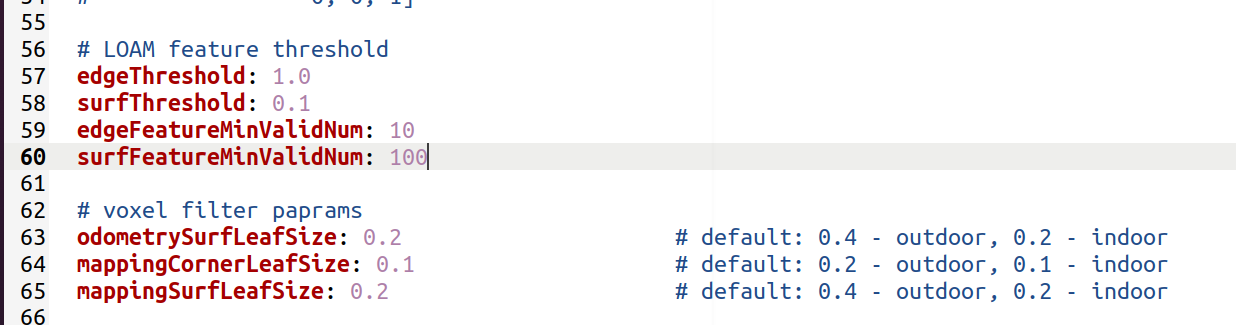
LIO-SAM 测试环境: Ubuntu18.04 ROS melodic 激光雷达:RS16 组合惯导:华测CGI-410(频率100HZ) 一、数据格式 1.1 IMU数据格式 作者用的九轴IMU,本次测试用的六轴,未对源码修改。 注:IMU单位:rad/s;m/s^2;rad; IMU坐标:y前,x右,z上(作者:x前,y左,z上) 1.2 Lidar 数据格式 LIO-SAM