本文主要是介绍Point-LIO:鲁棒高带宽激光惯性里程计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 动机
现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。
2. 主要贡献
1) 提出了一种逐点(point-wise) LIO框架,该框架在实际采样时间融合激光雷达点,而不会累积到帧中。去除点累积消除了帧内运动失真,并允许以接近点采样率的高里程计输出和建图更新,这进一步使系统能够跟踪非常快的运动。
2) 为了进一步提高系统带宽到超出IMU测量范围,用随机过程模型对IMU测量进行建模。将该模型扩展到系统运动学中,并将IMU测量值视为系统输出。即使IMU饱和,随机过程增强的运动学模型也可以平滑估计系统状态,包括角速度和线加速度。
3) 将这两个关键技术集成到一个完全紧耦合的LIO系统中,称为Point-LIO。系统使用流形扩展卡尔曼滤波器通过在其各自的采样时间融合每个LiDAR点或IMU数据来更新系统状态。通过利用系统的稀疏性和线性,开发的系统即使在微型飞行器上基于低功耗ARM的计算机上也能实现实时状态估计。
4) 开发的系统在由具有非常小FoV的新兴固态LiDAR收集的各种挑战性的现实世界数据中进行了测试。结果表明,Point-LIO具有运动畸变补偿能力,具有高里程计输出速率 (4-8 kHz) 和高带宽 (>150Hz) 的能力。该系统还能够在初始阶段后通过饱和IMU测量来估计极端激进运动 (角速度大于75 rad/s) 下的状态。此外,对来自各种公开LiDAR数据集的12个序列的详尽基准比较表明,Point-LIO实现了与其他方法一致可比的准确性和效率,同时花费更少的计算资源。最后演示了实际无人机上的实际应用。
3. 方法概览

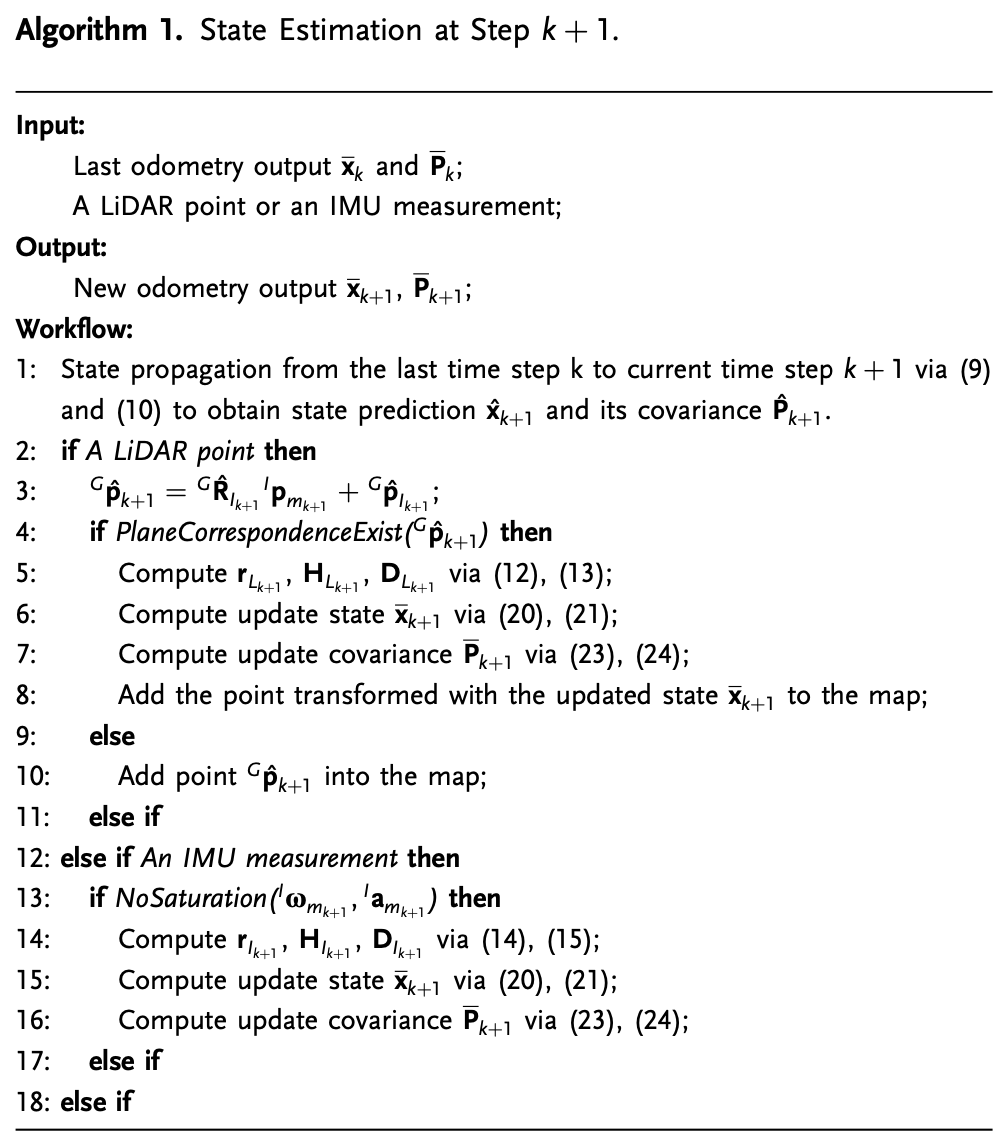
其设计理念主要基于:1) LiDAR点是在相应的时间顺序采样的,而不是同时采样的帧;2) IMU数据是系统的测量,而不是输入。接收到每个测量值(即LiDAR点或IMU数据),就将其在流形扩展卡尔曼滤波器框架中融合。顺序采样的LiDAR点和IMU数据都用于在各自的时间戳更新状态,从而得到极高频率(4-8 kHz)的里程计输出:
- 对于接收到的每个LiDAR点,搜索地图的对应平面 (为了在允许新注册点的同时实现快速的平面对应搜索,使用了在FAST-LIO2 中开发的增量k-d树 (ikd-Tree))。
- 如果点与从地图中的点拟合的平面匹配,则计算残差以使用流形卡尔曼滤波器更新系统状态。优化的位姿最终将LiDAR点注册到全局帧中并合并到地图,然后进行下一个测量 (LiDAR点或IMU数据)。
- 否则,如果点没有匹配的平面,则通过卡尔曼滤波器预测的位姿将其直接添加到地图中。
- 对于每个IMU测量,分别对IMU的每个通道进行饱和度检查,具有饱和值的通道将不用于状态更新。
4. 状态估计
4.1. 符号
本文使用了误差状态卡尔曼滤波器,相关变量的定义如下:
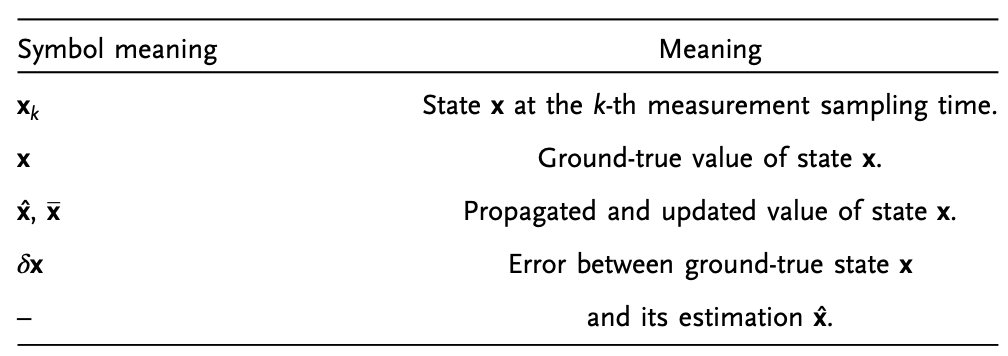
另外,定义了两个符号
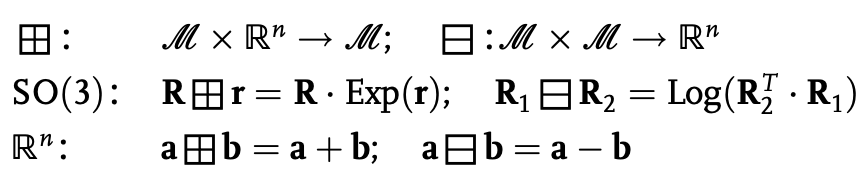

4.2. 运动学模型
4.2.1. 状态转移模型
连续运动模型

离散运动模型


4.2.2. 测量模型
系统中存在两种测量,分别是激光雷达测量和Imu测量。二者的频率一般是不同的,所以也不是同步触发的。
本文忽略标定,则

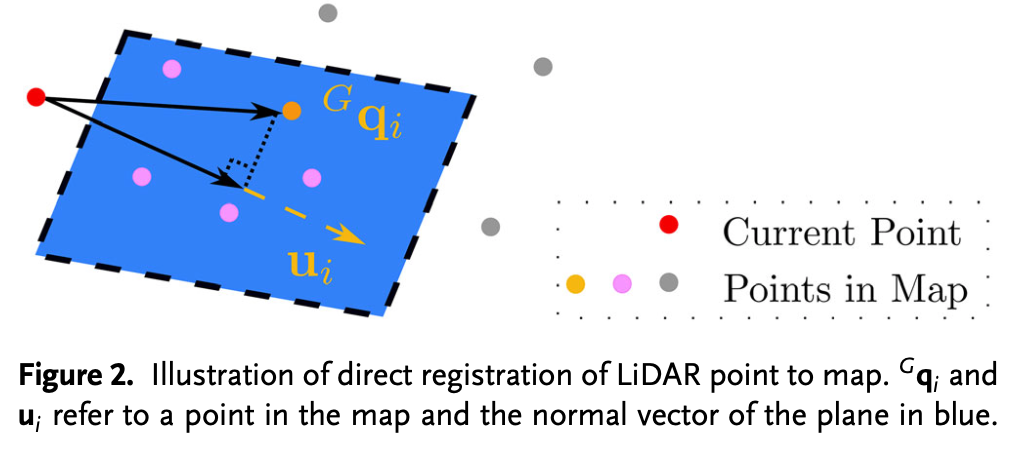
利用位姿把点转换到全局坐标系后,根据局部平面假设有

其原理图如图2所示
 Imu的测量包含角速度测量和加速度测量。
Imu的测量包含角速度测量和加速度测量。
 可以把激光雷达和Imu和测量联立为如下形式
可以把激光雷达和Imu和测量联立为如下形式

4.3. 扩展卡尔曼滤波
Point-LIO的状态估计使用了紧耦合的扩展卡尔曼滤波。
4.3.1. 状态传播
设在第k步时状态为,协方差为
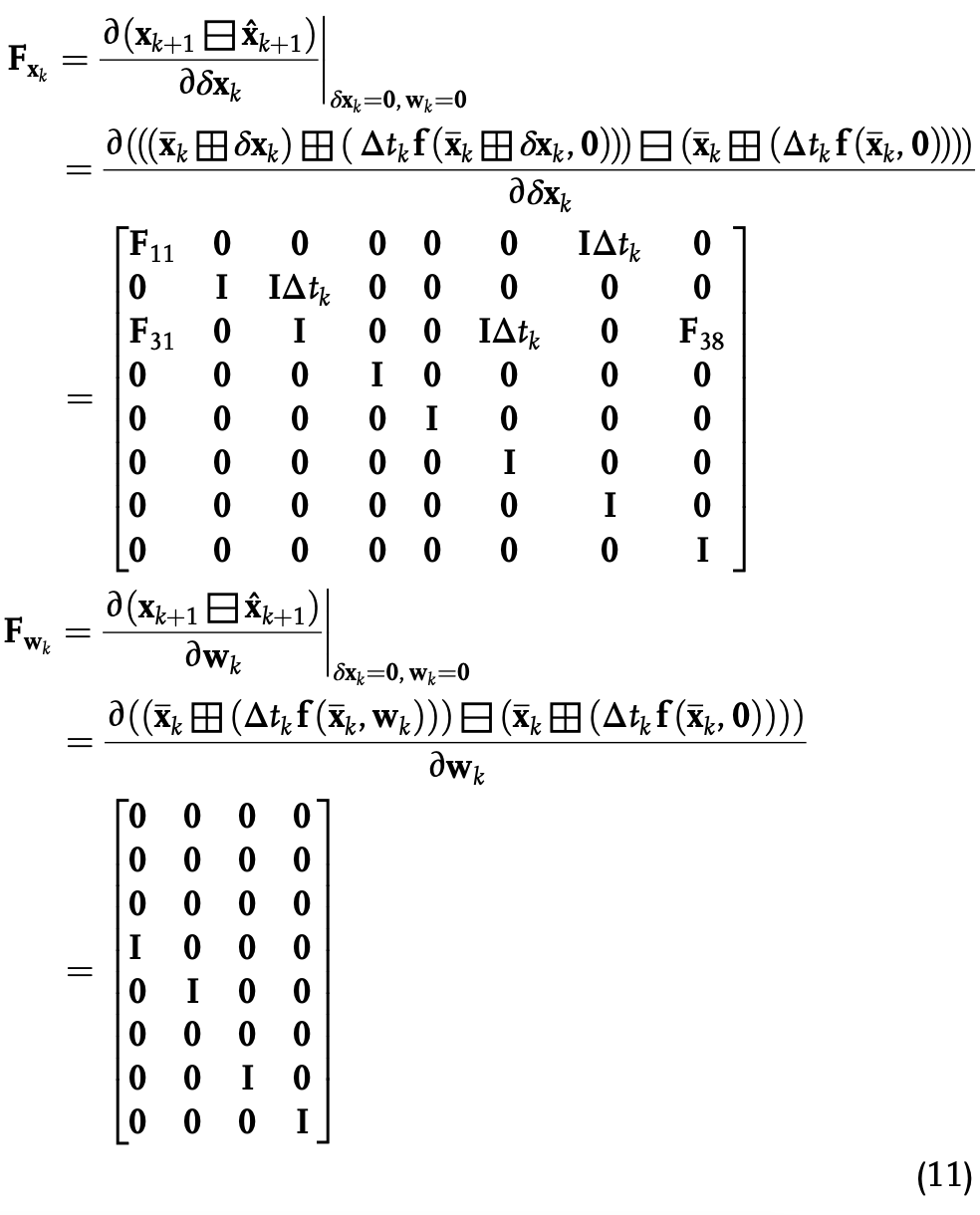
,此时收到了传感器的最新测量值,则需要把状态由k步更新到k+1步,其状态转移方差为

协方差传播为

其中
4.3.2. 残差计算
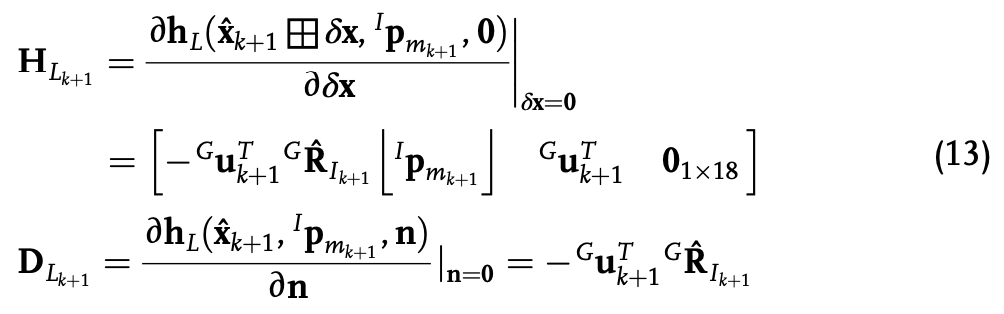
- 激光雷达测量
利用位姿把每个激光雷达点投影到全局坐标系中,寻找最近邻点拟合为局部平面并计算残差。如果最近邻的5个点不能拟合为平面,则当前点直接进入地图,而不参与残差计算与状态更新。
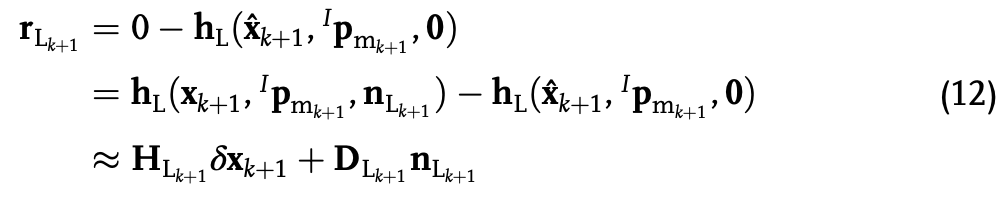
其中
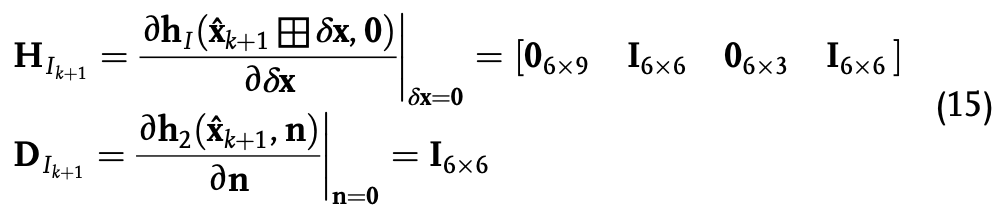
- Imu测量
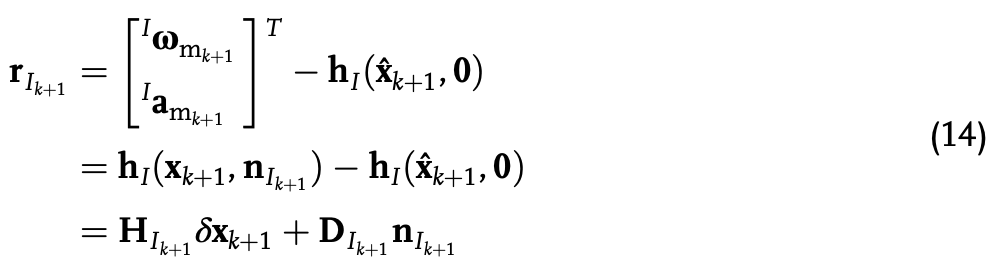
其中
把源自激光雷达测量和Imu测量组合在一起:

4.3.3. 状态更新
状态和协方差的传播给了未知状态一个先验的高斯分布

观测模型也给了一个高斯分布

把先验分布和测量模型组合起来,生成状态的后验分布。

其中,该优化问题是一个标准的二次规划问题,最优解
可以由卡尔曼更新得到。

继而得到

更新的状态可以用于下一步的传播。
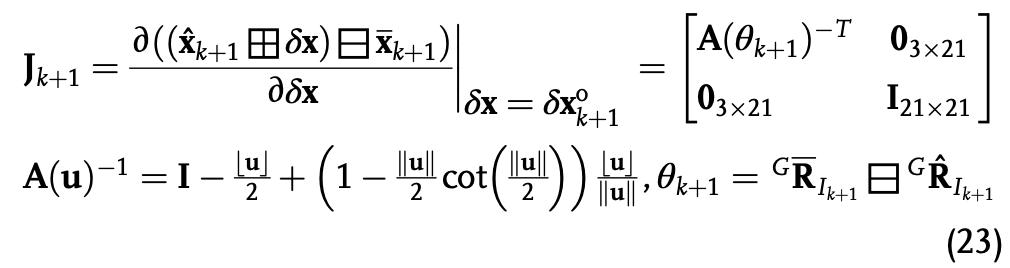
接下来,要估计协方差:


4.4. 分析
本文提出的LIO框架,在接受每个激光雷达点时消费之并更新状态,形成了点级别的里程计。其输出频率等于激光点的频率。
点级别LIO框架的另一个优点是运动补偿。
5. 评测
主要评估三方面:
- 去除运动畸变;
- 高频率、高带宽的里程计;
- 饱和IMU情况下的状态估计;
5.1. 实现细节
使用C++和ROS实现:
- EKF是基于作者在先前工作中开发的IKFoM工具箱(https://github.com/hku-mars/IKFoM)实现的。
- 使用FAST-LIO2中开发的增量k-d树 (ikd-Tree) 作为地图结构,其默认参数为:局部地图大小 L = 2000 m,空间下采样分辨率 l = 0.25 m,ikd-Tree的重平衡阈值为
= 0.6,
= 0.5,用于并行重建(在第二线程中)的子树大小阈值为
= 1500。
- 尽管系统被设计为在每次LiDAR点接收后执行状态估计,但实际上,受LiDAR制造商提供的可用驱动程序的限制,LiDAR点在累积完整扫描后被打包,然后发送到LIO系统。为了满足这一实际限制,Point-LIO根据它们各自的时间戳对接收到的包中包含的所有LiDAR点和IMU数据进行排序。然后,将排序后的数据逐个逐点处理-LIO。
在所有评估中,将Point-LIO与最先进的基于帧的里程计FAST-LIO2进行了比较:
- FAST-LIO2的所有结果都是使用开源的FAST-LIO2及其默认参数值 (基本上也是上面的参数值) 得到的
- 由于FAST-LIO2为每次接收到的LiDAR帧执行分辨率为0.3的空间降采样,为了公平比较,也在Point-LIO中执行这样的空间降采样,然后再进行数据排序和逐点更新
消融实验:
- 逐点更新:仅用逐点更新,而没有应用有色随机模型。系统与FAST-LIO2相同,将IMU测量值建模为系统运动学模型的输入,但不同之处在于扫描中的每个单独的LiDAR点都用于像本文提出的系统那样顺序更新系统,该系统命名为Point-LIO-input。
5.2. 实验平台
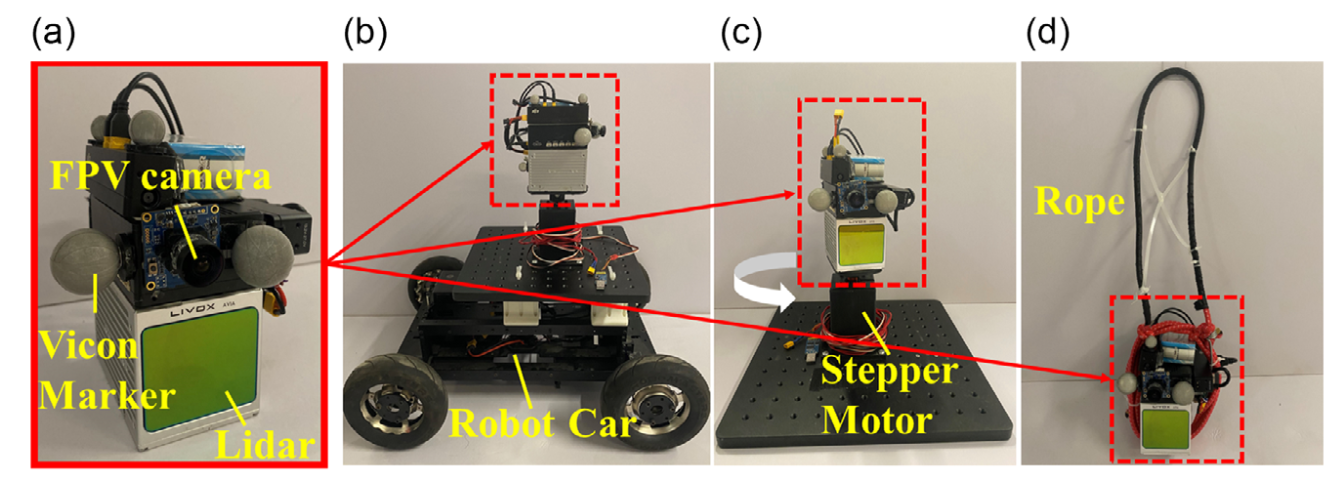
- 固态3D激光雷达Livox Avia:1)70.4° (水平) × 77.2° (垂直) 圆形FoV和非常规的非重复扫描模式,可产生230,000Hz的点测量结果;2)内置的IMU (BMI088型) 可产生200Hz的IMU数据;3)点和IMU数据以从10 hz到100Hz可调的频率收集。
- 第一人称视角 (FPV) 相机
- 五个用于真值测量的Vicon标记。
- 为了产生不同类型的运动,构建了三个不同的平台来承载传感器套件,包括:1)机器人车 (图3 (b)),深圳大疆开发的RoboMaster 2019 AI;2)由步进电机驱动的旋转平台 (图3 (c)),Nimotion STM4260A;3)一个钟摆(图3(d))
5.3. 运动畸变处理
使用图3 (b) 所示的机器人车收集了一些序列,测试了三种不同的场景,即
- 公园:Belcher Bay Park (非结构化场景)
- 广场:HKU的百年小广场 (半结构化场景)
- 走廊:HKU的Haking Wong大楼的走廊 (结构化场景)
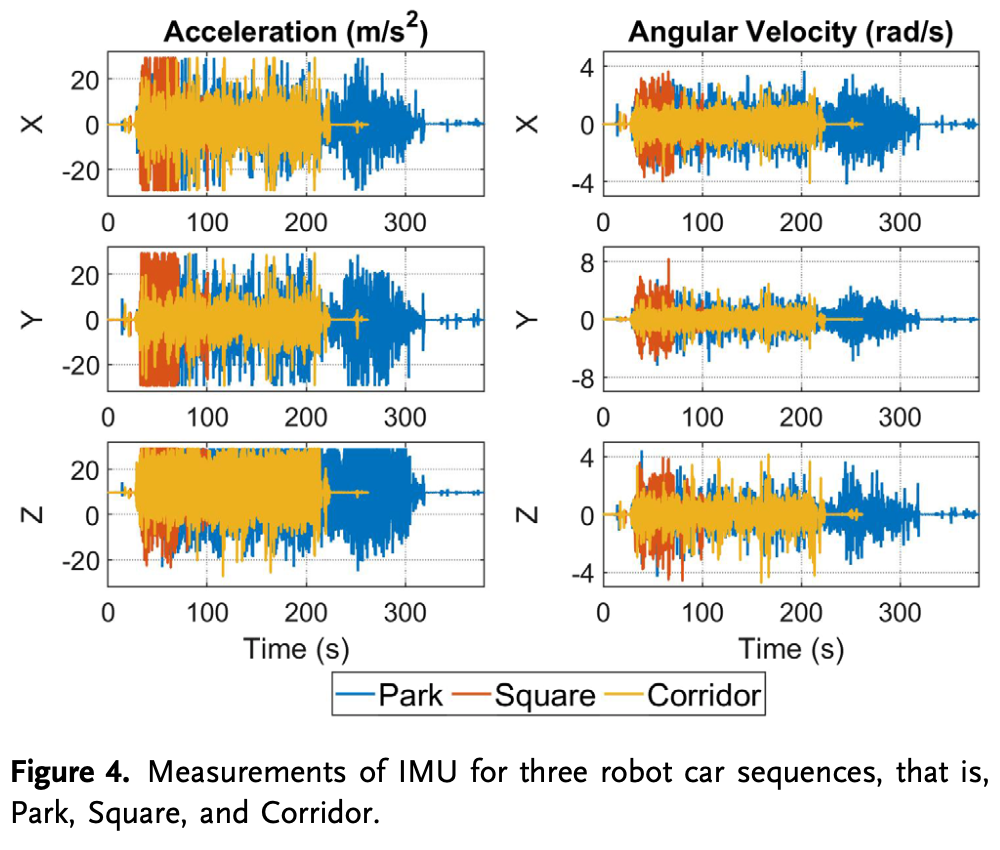
在所有序列中,机器人车返回起点,能够计算漂移。LiDAR数据的频率为10Hz。一个挑战是机器人车在地面上移动时的强烈振动。由于传感器套件安装在底盘上,没有任何减震器,振动将直接传递给传感器,导致剧烈的抖动运动,如图4所示的内置IMU数据所示。
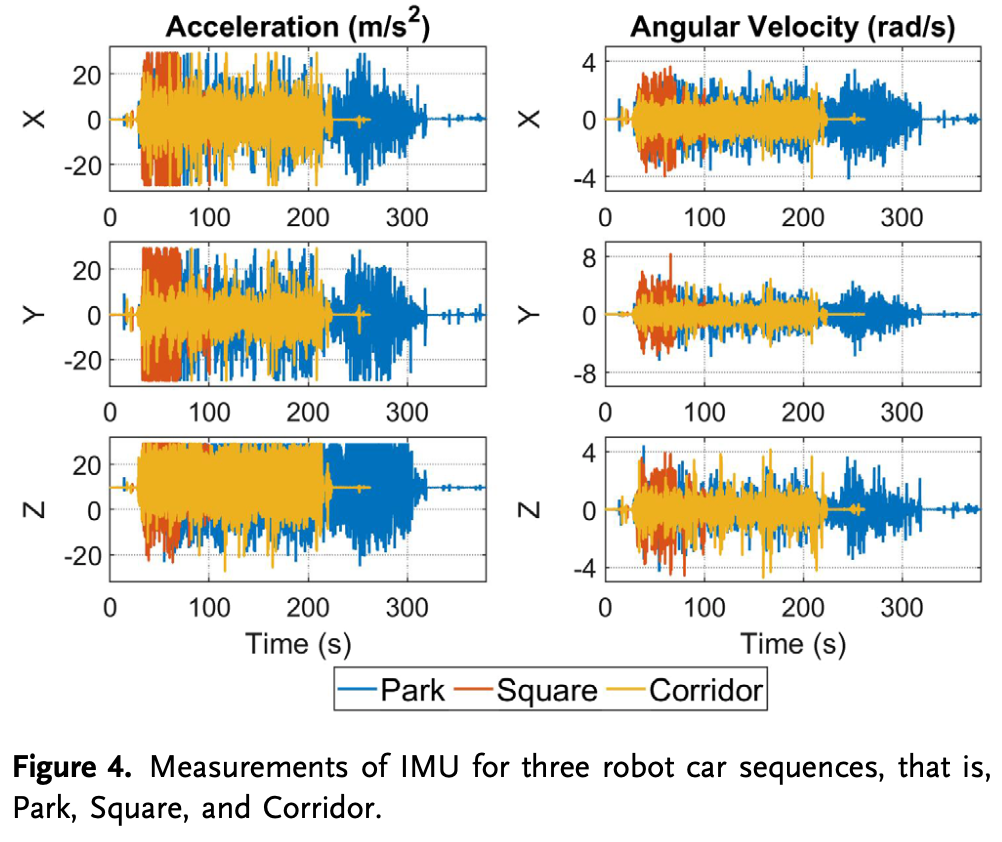
当机器人汽车在开始时静止时,IMU测量值稳定地很小。随着汽车开始移动,IMU的测量值迅速变化。
5.3.1. 建图结果
每个图里,
- 首先展示最终建图结果的全局视图 (即子图 (a)),然后关注包含大平面 (例如墙) 的某些局部区域 (子图 (b))。
- 进一步通过墙上点的一致性 (子图 (c)),比较建图精度1)FAST-LIO2 (即 (b1),(c1))2)Point-LIO-input (即 (b2),(c2))3)Point-LIO (即 (b3),(c3))。
- 最后,为了显示帧内运动失真,展示了上面选择的局部区域中的一次扫描 (在一个扫描周期0.1 s内的累积) 的点 (子图 (d)) 以及进一步放大(子图 (e)),其中红点指的是当前扫描中已注册的LiDAR点,白点是累积到当前扫描的地图结果1)FAST-LIO2 (即(d1) 、 (e1))2)Point-LIO-input (即 (d2),(e2))3)Point-LIO (即 (d3),(e3))

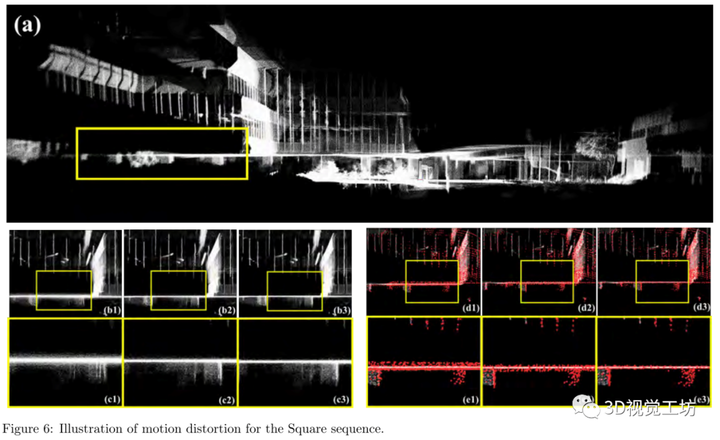
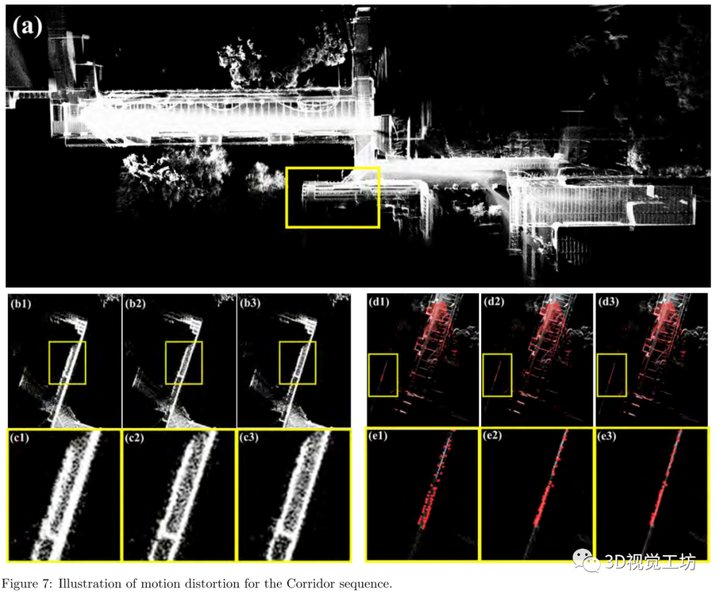
从图5,图6和图7的子图 (c) 可以看出,FAST-LIO2 (c1) 的整体图明显比Point-LIO-input (c2) 厚,Point-LIO (c3) 产生的墙比Point-LIO-input更薄。这种现象的原因在于如图5、图6和图7的子图 (e) 所示的每个单独扫描中的帧内运动补偿。可以看出,所选壁周围的所有红点都应该属于同一平面,但是由于帧内运动失真,它们实际上会从壁上散射FAST-LIO2 (e1)。Point-LIO-input和Point-LIO的这种帧内失真现象得到了很大缓解 ((e2) 和 (e3))。FAST-LIO2使用基于IMU测量的向后传播来将扫描的所有点投影到扫描结束的位姿。此过程很容易受到IMU测量噪声,偏差估计误差和有限的IMU采样率的干扰。具体来说,由传感器振动引起的加速度和角速度即使在IMU的一个采样间隔内也以高速率变化,导致大的IMU传播误差,因为假设角速度和加速度在一个采样间隔期间是恒定的。此外,低帧率 (即10Hz) 还需要长时间 (即100 ms) 的IMU传播,这累积了位姿误差并导致大的帧内失真,如子图 (b1) 和 (c1) 所示。相反,Point-LIO在其真实采样时间处融合LiDAR点,而没有任何点累积,这从根本上消除了运动失真,如Point-LIO-input的子图 (c2) 和Point-LIO的子图 (c3) 所示。此外,当将两个逐点更新方案Point-LIO-input (c2) 与Point-LIO (c3) 进行比较时,Point-LIO的性能稍好。这是因为Point-LIO-input仍然使用IMU测量来传播状态 (尽管仅用于一个LiDAR点间隔),因此仍然受IMU测量噪声和偏差估计误差影响。相反,Point-LIO使用IMU测量的滤波但不使用原始数据来传播状态,这稍微减少了 (e3) 中观察到的运动失真。
5.3.2. 漂移结果
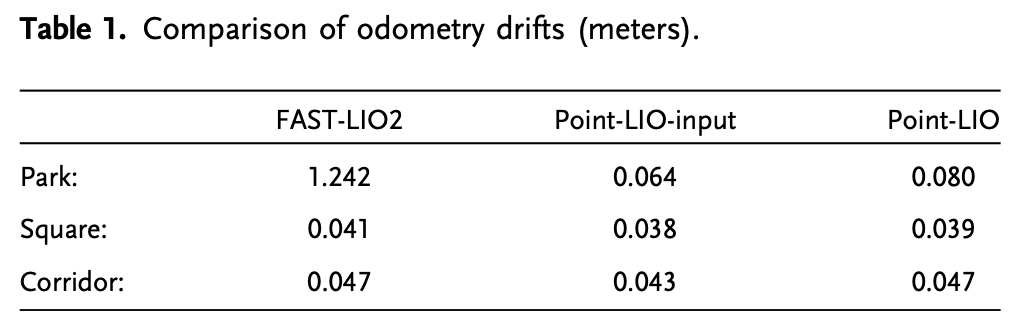
由于机器人车的不完善操作,开始和结束位置之间的距离不完全为零,但小于10cm。可以看出:
- 对于Square和Corridor序列,FAST-LIO2,Point-LIO-input和Point-LIO具有可比的漂移。
- 对于Park序列,FAST-LIO2无法返回起点,这是因为公园是一个非结构化的环境,这使得运动失真对测距精度的影响更加明显。
5.4. 高频率、高带宽里程计输出
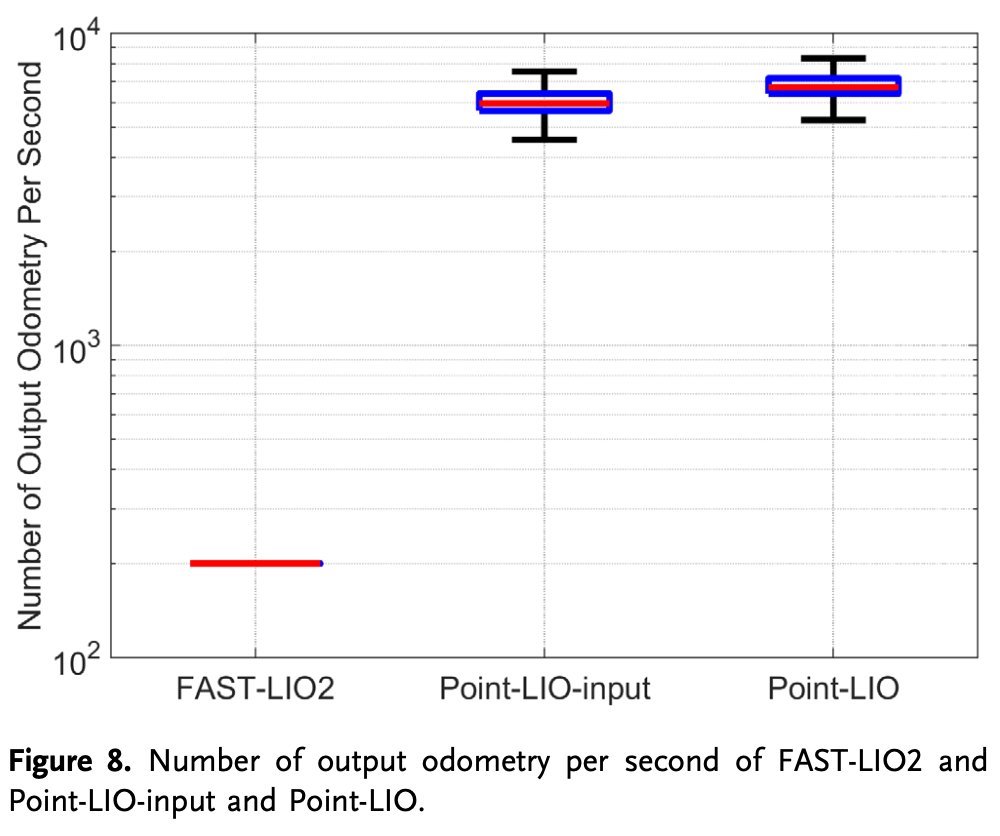
通过向步进电机提供快速变化的速度命令,在使用旋转平台 (图3 (c)) 收集的室内数据集 (表示为 “Odo”) 上测试FAST-LIO2、Point-LIO-input和Point-LIO的里程计输出频率。在本实验中,LiDAR包的速率为100Hz。即使以100Hz的LiDAR速率收集数据集,通过将一个帧分成多个帧 (但低于200Hz的IMU速率),FAST-LIO2框架也自然可扩展到更高的状态更新频率。因此,将一个LiDAR帧分为两个运行FAST-LIO2。图8显示了里程计输出频率的分布。FAST-LIO2的输出频率是200Hz,和帧率一样。Point-LIO-input和Point-LIO的频率在4kHz和8kHz之间。
为了能够进行带宽分析,以上实验以最高频率300Hz记录来自Vicon跟踪器的真值测量重新进行。将系统输出 (根据里程计估计的偏航角) 除以系统输入 (由Vicon系统测量的真值偏航角),我们得到在不同的输入频率下FAST-LIO2、Point-LIO-input和Point-LIO的幅度响应 (dB),如图9所示。
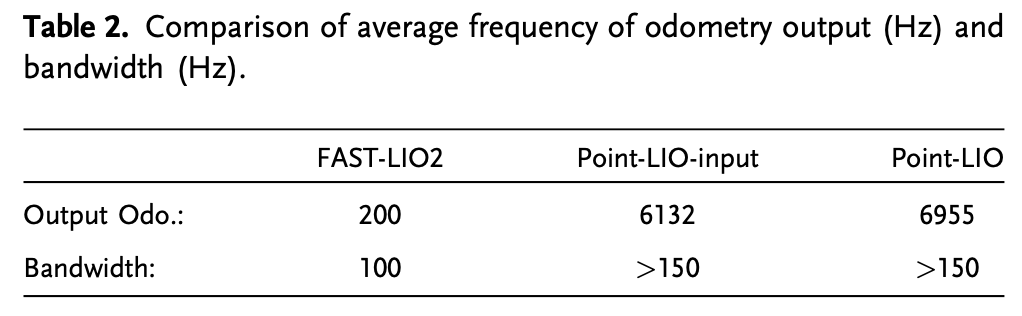
可以看出,当输入频率接近100Hz时,FAST-LIO2的幅度响应开始下降,这表明带宽为100Hz (见表2)。根据Nyquist-Shannon采样定理,当输出频率为200Hz时,100Hz也是可达到的最高带宽。相反,Point-LIO-input和Point-LIO都具有大于150Hz的带宽,这超出了Vicon系统的测量能力。
5.5. 饱和IMU测量下的极激进运动
尽管到目前为止,Point-LIO-input和Point-LIO具有可比的性能,但本节展示了Point-LIO即使超出IMU测量范围,也能够跟踪极其激进的运动。在实验中产生两种类型的运动:
- 旋转运动 (表示为 “Satu-1”)
- 在空间中盘旋 (表示为 “Satu-2”)
由于较高的旋转速率或较大的离心力,两个实验在初始阶段后都会遭受IMU饱和。据我们所知,以前的SLAM系统无法应对这种激进的运动或饱和的IMU测量。
5.5.1. 旋转运动
使用放置在杂乱的实验室环境中的旋转平台进行 (见图10 (a1)-(a4))。在实验过程中,传感器套件由步进电机在步进角速度命令下旋转,该步进角速度命令从零逐步增加到峰值,然后在结束时减小到零。所得的峰值角速度为75rad/s (yaw),远远超过IMU测量范围,即35rad/s。高角速度还会导致大约的峰值加速度,也远远超出IMU测量范围,即大约
。

图10 (c1) 和 (c2) 中所示的板载FPV图像给出了旋转过程的图示。Point-LIO的建图结果如图10 (b1) 所示,它显示了建图结果与环境基本一致,估计的结束位置与开始位置非常吻合,如图10 (b2) 所示。
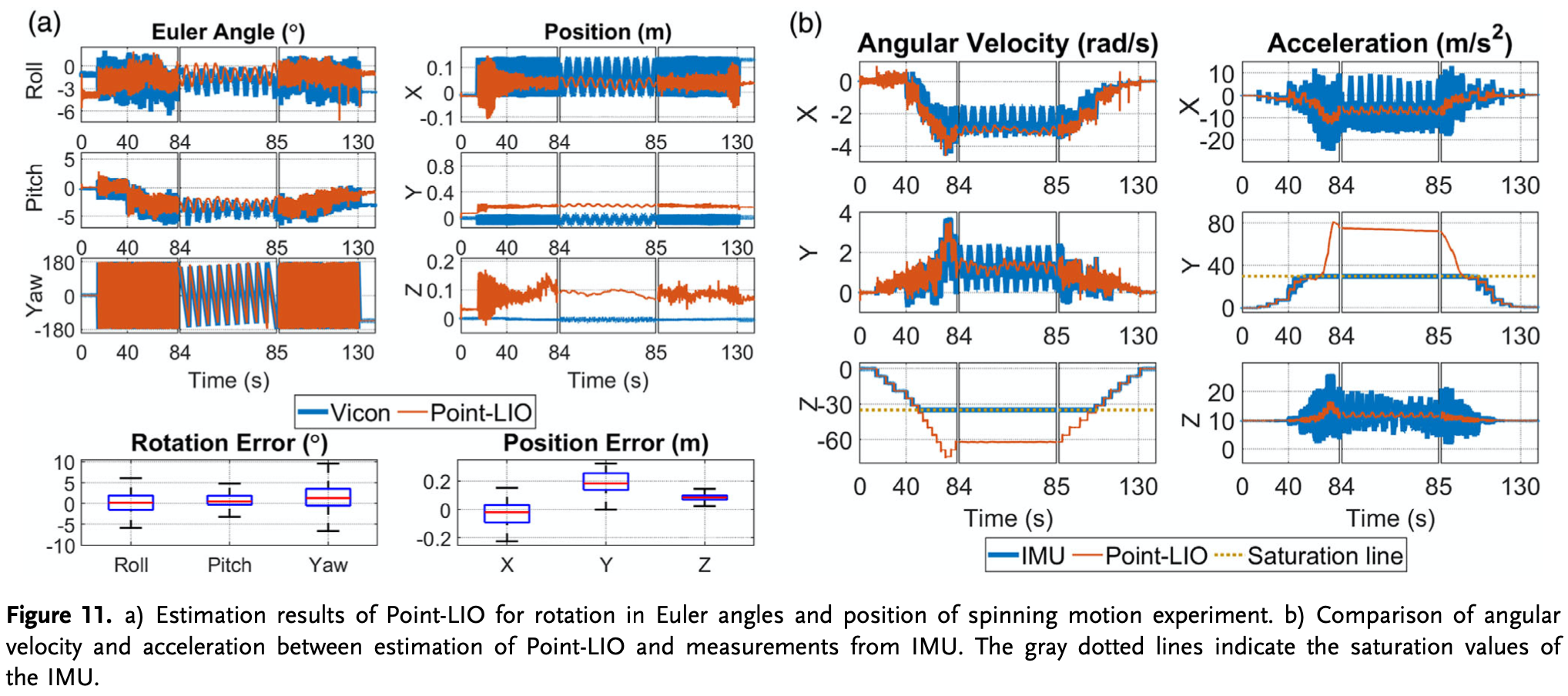
将估计的运动学状态 (包括欧拉角旋转和位置) 与图11 (a) 中的GT进行比较,其中x轴被分成三个部分以放大时间段84-85s。yaw的连续快速变化是由于步进电机驱动的连续旋转,位置上的正弦形波动是由Vicon标记和步进电机轴之间的偏移引起的。可以看出:
- 估计的yaw角可以在整个过程中紧密跟踪实际yaw角
- 总体旋转和平移误差 (以RMSE计) 分别为4.60°和0.233m。平移的RMSE略大主要是由y方向引起的,从一开始,该方向的约束就不足。考虑到实验中的极端运动,这种平移误差是可以接受的。
Point-LIO的另一个好处是能够估计IMU饱和时的角速度和加速度 (即系统的状态,因此可以通过卡尔曼滤波器进行估计)。图11 (b) 展示了估计值与IMU测量值的关系。可以看出,在50-106s的时间段内,IMU饱和 (陀螺仪的z轴和加速度计的y轴),而Point-LIO仍然可以给出合理的估计。在该区域之外,尽管对一些高频分量进行了滤波,但Point-LIO的估计与IMU测量结果非常吻合。

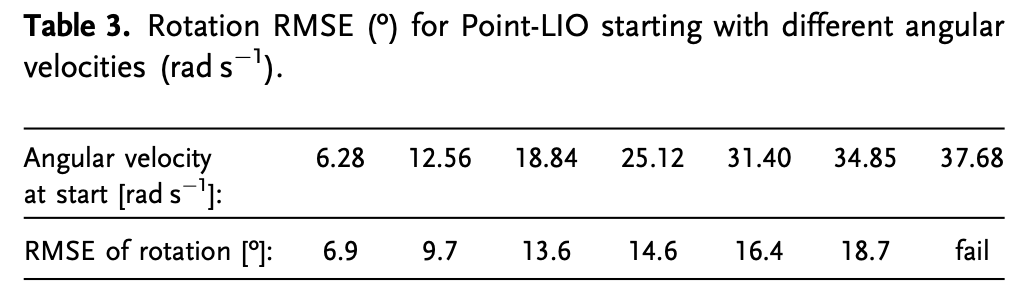
通过以不同的电动机初始角速度启动Point-LIO来进一步挑战它。如图12中的地图结果和表3中的旋转RMSE所示,当初始角速度低于IMU饱和值,即35rad/s,Point-LIO能够通过构建合理的地图和状态估计来生存。与上述传感器从静止位姿开始的情况相比,状态估计的质量略有下降。这种性能下降是合理的,因为快速的初始角速度导致Point-LIO在一开始就构建有偏差的地图,这进一步误导了随后的状态估计。这也导致旋转RMSE随初始角速度的增加而增加,如表3所示。当初始角速度超出IMU测量范围时,Point-LIO由于太大的初始状态估计而失败 (例如,初始角速度估计设置为零,而实际大于35 rad/s)。
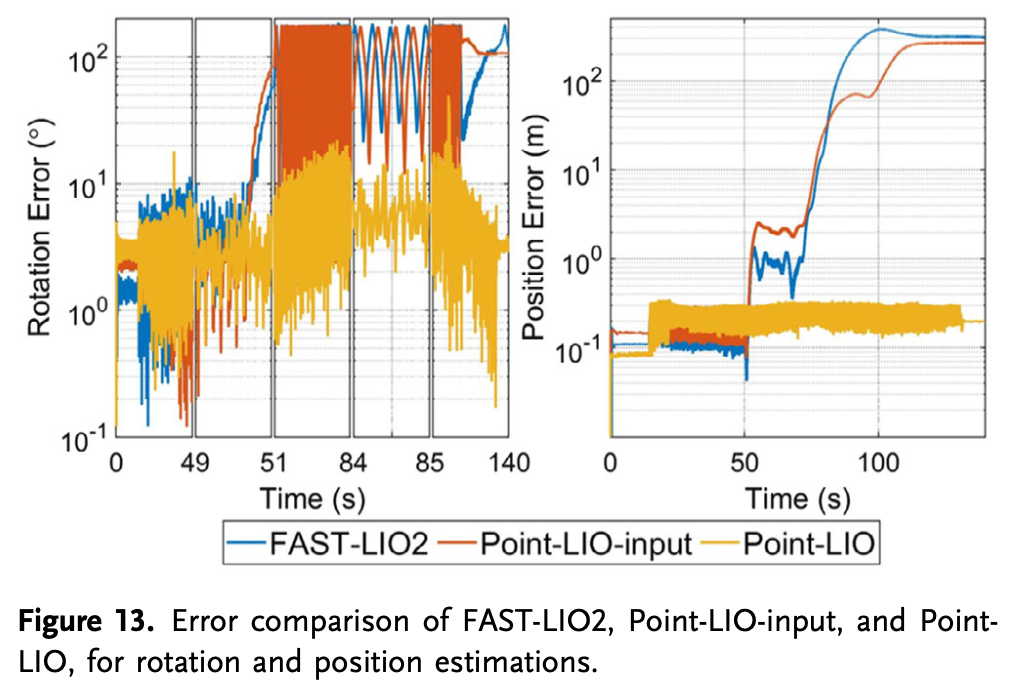
最后,作为对比,在同一数据集上运行FAST-LIO2和Point-LIO-input,旋转和位置的误差比较如图13所示。可以看出:
- FAST-LIO2,Point-LIO-input和Point-LIO的估计在IMU正常工作的前50s期间具有可比的旋转误差。
- 从IMU开始饱和的50s开始,FAST-LIO2和Point-LIO-input的旋转估计开始立即发散,并且位置的估计也开始漂移然后发散。
总之,FAST-LIO2以及Point-LIO-input在饱和IMU测量下无法工作,而如果没有从一开始就饱和,Point-LIO可以很好地生存。
5.5.2. 盘旋运动
该实验是在相同的实验室环境中使用摆锤进行的 (参见图14 (d))。在此实验中,传感器套件被绑在绳索的一端,该绳索在垂直平面中摆动成盘旋轨迹 (请参见图14 (b))。

此运动导致圆底部的加速度高达,超过了IMU测量范围
。图14 (e) 中所示的FPV图像给出了运动的视觉图示。
定性结果:
图14 (c1) 和 (c2) 显示了Point-LIO的建图结果。由于LiDAR面向前方,具有70.4°×77.2° 圆形FoV,因此仅绘制了实验室的一侧。估计的轨迹如图14 (a) 所示,与图14 (b) 所示的实际传感器路径高度吻合。
定量结果:
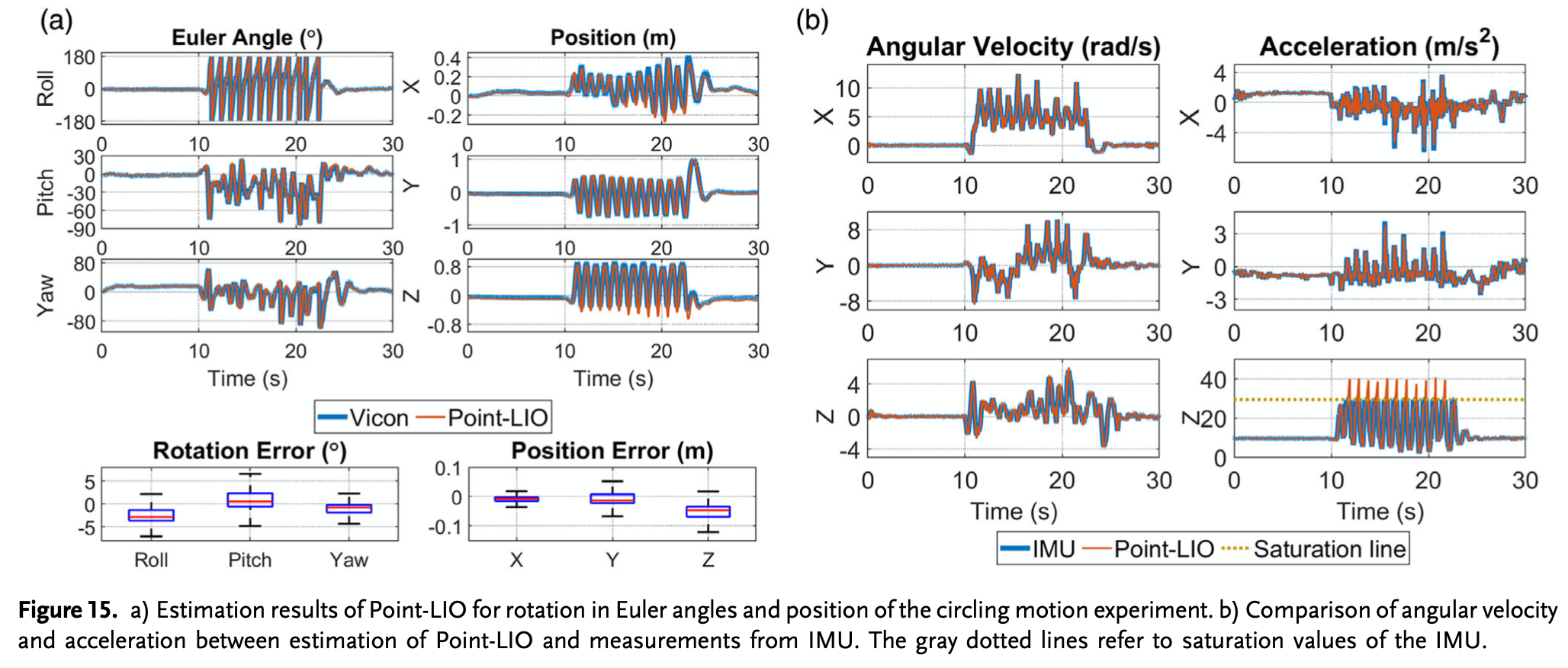
将估计的欧拉角旋转和位置与图15 (a) 中由Vicon测量的真值进行比较,其中欧拉角和位置的估计在12个连续圆都成功了。平均旋转误差和平移误差的RMSE分别为4.42°和0.0990 m。图15 (b) 显示了通过Point-LIO与IMU测量值的估计角速度和加速度。可以看出:
- 当这些动态状态在IMU测量范围内时,估计值与IMU测量非常吻合
- 即使IMU饱和,Point-LIO也可以给出合理的加速度估计

图16进一步示出了Point-LIO、Point-LIO-input和基于帧的里程计FAST-LIO2之间的误差比较。与上一个实验类似,由于能够应对IMU饱和,Point-LIO的估计误差始终低于其他两个。
5.6. 实时性能

在图17中示出了用于处理LiDAR点的一次扫描的Point-LIO-output的每个步骤的平均时间成本,其在基于intel i7的微型UAV机载计算机、具有1.8 GHz四核Intel i7-8550U CPU和8 GB RAM的DJI Manifold2-C7上进行测试。建图包括搜索最近的点并将点添加到地图中,这占用了最大的时间消耗。即使在每个LiDAR点处更新系统状态,EKF滤波的时间包括状态传播和更新,对于10Hz序列小于10ms,对于100Hz序列小于1 ms。在表4中的FAST-LIO2、Point-LIO-input和Point-LIO-output之间比较一次扫描的平均总时间消耗。表示LIO在这些序列中失败。
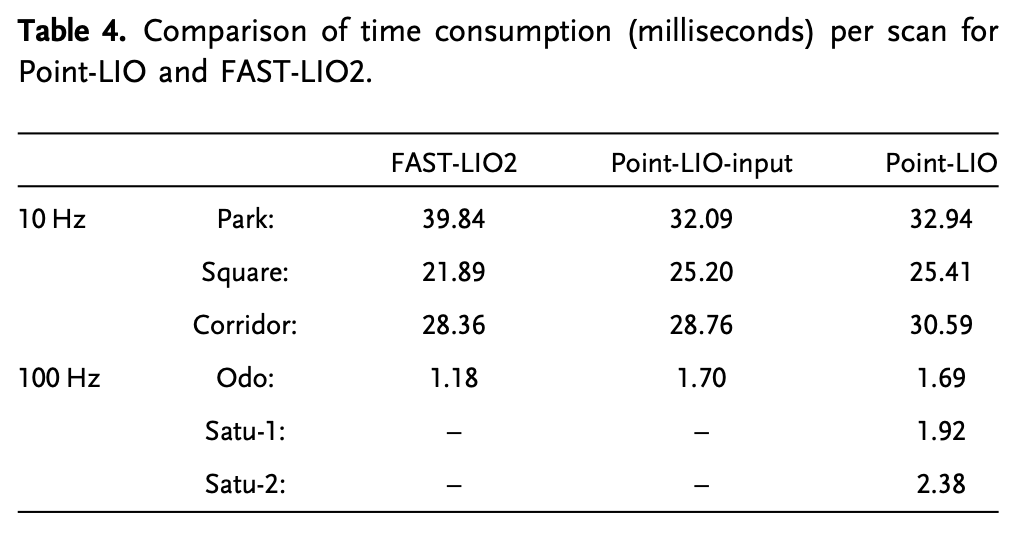
可以看出,Point-LIO (Point-LIO-input或Point-LIO),具有与FAST-LIO2相当的时间消耗,且都实现了实时性能,即,对于10Hz序列在100ms内,对于100Hz序列在10ms内。最后,所有序列上每秒处理的平均点数 (包括具有和不具有平面对应关系的点数)是33,710,并且每个点的平均处理时间为9 us。
6. 基准结果
在各种公开数据集序列上对Point-LIO进行测试,这些序列具有更平缓的运动,没有IMU饱和,并将其与其他最先进的LiDAR惯性里程计方法进行了比较,包括FAST-LIO2,LILI-OM,LIO-SAM 和LINS。用于基准比较的计算平台是与FAST-LIO2中使用的相同的轻型无人机机载计算机,它是具有1.8 GHz四核英特尔i7-8550U CPU和8GB RAM的DJI Manifold2-C7,因此FAST-LIO2,LILI-OM,LIO-SAM,LINS可以直接从FAST-LIO2论文中获得。Point-LIO使用与FAST-LIO2相同的建图结构,为了公平比较,将Point-LIO的建图参数设置为与FAST-LIO2的默认值相同,即:
- 局部地图大小L = 1000 m
- 在1:4 时间下采样(每四个LiDAR点取一个) 之后,LiDAR原始点直接输入状态估计
- 空间下采样分辨率 l= 0.5m
- ikd-Tree的重新平衡阈值为
,
,
- 对于Point-LIO的EKF部分,将卡尔曼滤波器的LiDAR测量噪声设置为
![]()
这些参数值对于所有序列都保持相同。在FAST-LIO2中使用的相同12个序列上评估本文的方法,这些序列来自4个不同的公共数据集,即 “lili”(来自LILI-OM),“utbm”,“ulhk”, “liosam”(LIO-SAM中)。其中,“lili” 使用固态3D激光雷达Livox Horizon,而其他三个数据集使用旋转的激光雷达,即,用于 “utbm” 和 “ulhk” 的Velodyne HDL-32E激光雷达,以及用于 “liosam” 的VLP-16激光雷达。这些激光雷达有不同的扫描模式。有关数据集和所选序列的更多详细信息,参见FAST-LIO2论文。
6.1. 准确率评估
和FAST-LIO2一样,采用ATE(平均平移距离)的RMSE(对于有好GT轨迹的序列)和端到端误差(对于起点终点在同一位置的序列)进行准确率评估。
6.1.1. RMSE基准
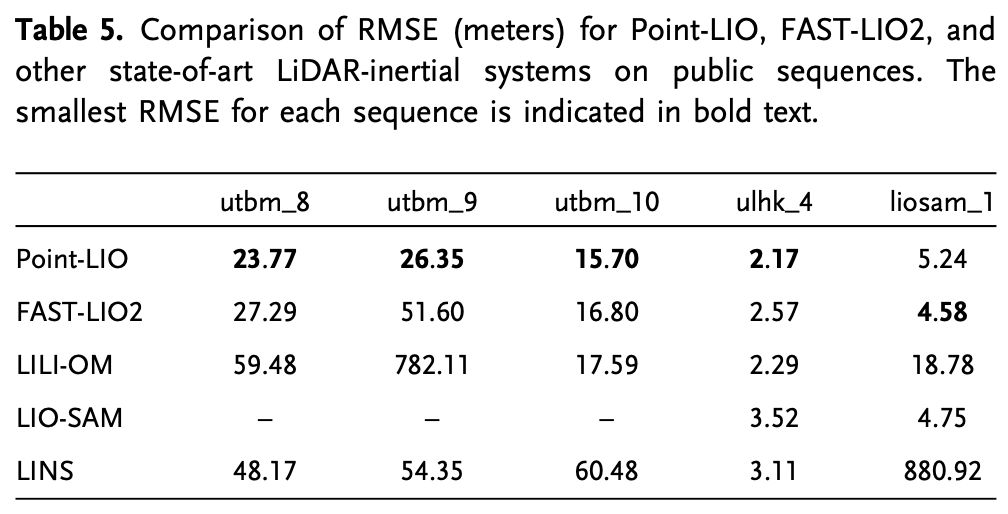
Point-LIO在5个序列中的4个达到了最好的RMSE,在utbm_9序列上最显著,在liosam_1上略比FAST-LIO2和LIO-SAM差。总体来说,Point-LIO和其他方法准确率相当(大部分情况要更好)。
6.1.2. 漂移基准
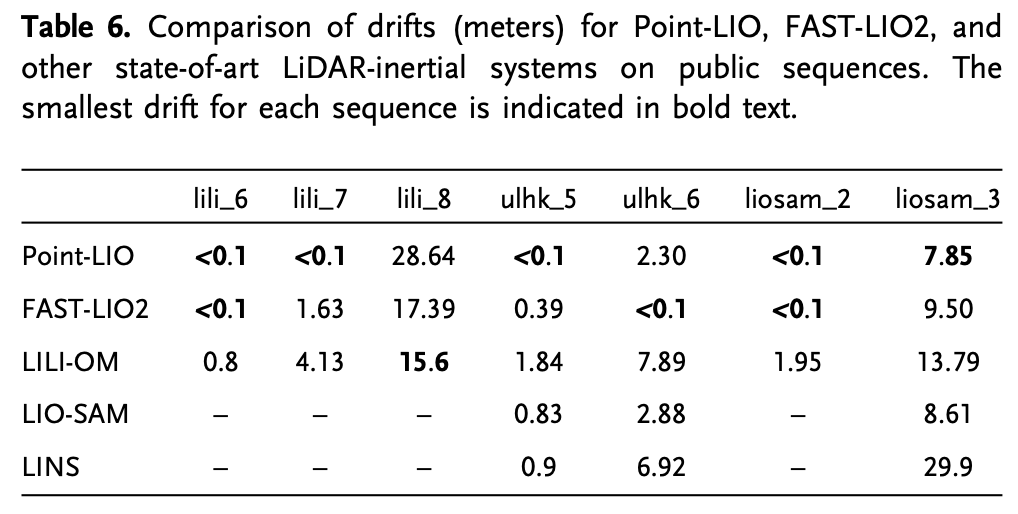
总体趋势与RMSE基准结果相似,即Point-LIO在7个序列中的5个序列中实现了最低的漂移。
- 序列lili_8的结果比LILI-OM和FAST-LIO2差,这是因为LILI-OM对他们自己的 “lili” 序列调整了参数,而Point-LIO的参数在所有序列中保持相同。
- 由于lili_8具有比其他两个 “lili” 序列长得多的轨迹,由不适当的参数引起的漂移将沿着后续过程累积,并导致比FAST-LIO2差10米以上的漂移。
- Point-LIO在序列ulhk_6上显示出比FAST-LIO2稍大的RMSE,尽管差距非常小。
从以上基准结果可以看出,Point-LIO在大多数序列中实现了更高的精度,而对于其余序列,和最佳方法的差距并不显著。考虑到所有数据集和序列的各种类型的LiDAR、环境和移动平台,这有效地显示了Point-LIO在实际数据上的准确性和鲁棒性。
6.2. 处理时间评估
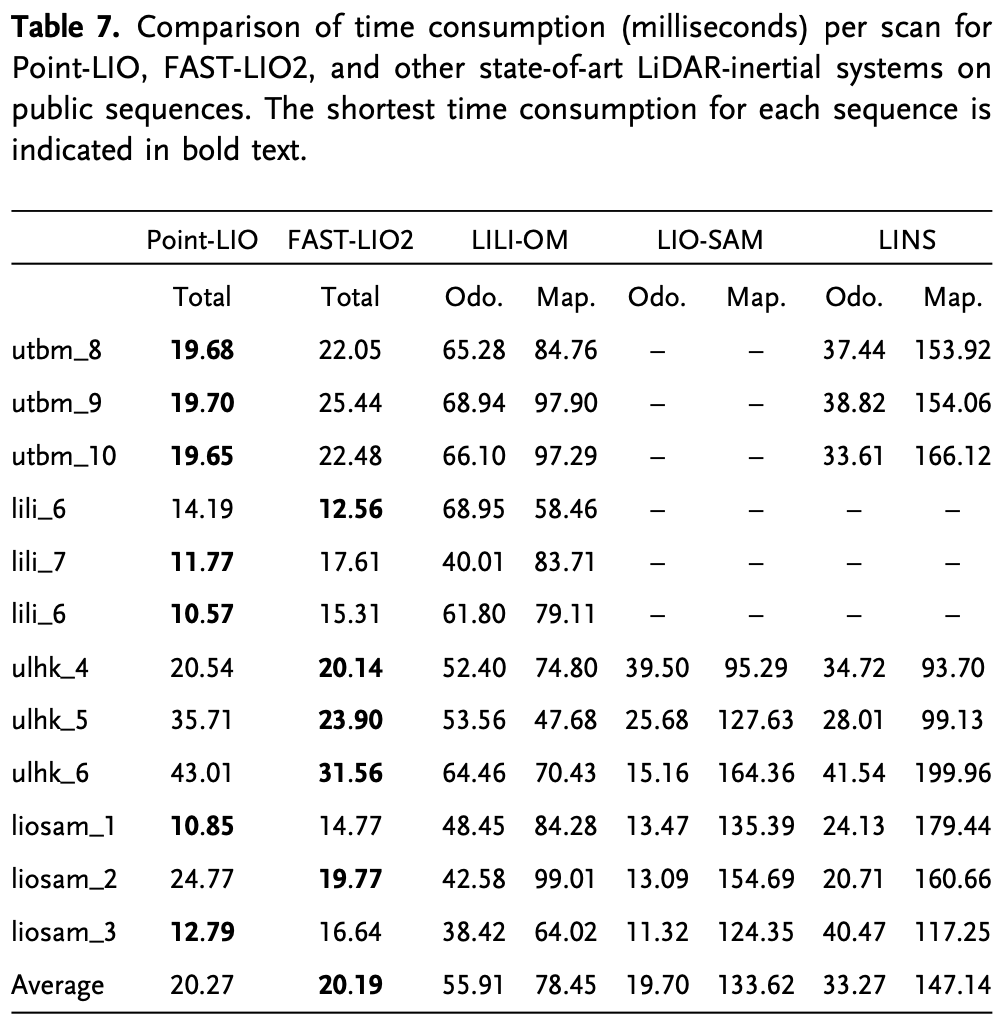
Point-LIO和FAST-LIO2都将里程计和建图集成在一起,其中在里程计更新的每个步骤中立即更新地图。因此,总时间 (表7中的 “总计”) 计算了里程计中发生的所有可能过程,包括点到地图匹配,状态估计和建图。另外,LILI-OM,LIO-SAM和LINS都基于里程计 (包括特征提取和粗位姿估计) 和建图 (例如LILI-OM中的后端融合,LIO-SAM中的增量平滑和建图,和在LINS中进行的地图细化),其每个LiDAR扫描的平均处理时间在对计算时间进行排序时由这两个部分 (“Odo.” 和 “Map.”) 求和。可以看出,与其他方法相比,Point-LIO和FAST-LIO2实现了最少的计算时间。与FAST-LIO2相比,Point-LIO在12个序列中的7个上花费的时间更少。这两种方法的平均计算时间非常接近。需要注意,基于帧的FAST-LIO2使用4个线程来并行化最近邻搜索,而Point-LIO是逐点的,必须串行执行这样的操作。尽管如此,Point-LIO平均计算时间仍然相当,这表明计算资源的使用较少,可以保留给其他模块 (例如规划、控制)。计算效率归功于系统的稀疏性以及不需要迭代卡尔曼滤波。总之,Point-LIO具有与FAST-LIO2相当的准确性和计算效率,且花费更少的计算资源。同时,Point-LIO比当前最先进的LIO算法 (即LILI-OM,LIO-SAM,LINS) 明显更快,实现了相当或更好的准确率。
7. 应用

将Point-LIO应用于两个无人机 (UAV) 的状态估计:
- 图18 (a) 中所示的竞赛四旋翼无人机上,其推力重量比高达5.4。高推力重量比使其能进行极其敏捷的运动。
- 另一个UAV位于称为自旋转UAV的敏捷、单驱动飞机上,如图18 (b) 所示。螺旋桨叶片通过两个被动铰链连接到电机轴,通过调节螺旋桨旋转速度的瞬时加速度和减速度,能够产生稳定UAV姿态所需的roll和pitch力矩。由于电机产生的未补偿力矩,无人机将产生高速率的连续yaw旋转。
7.1. 竞赛无人机
如图18 (a) 所示,竞赛无人机安装有Livox Avia LiDAR和FPV相机。LiDAR FoV与FPV相机的FoV对齐,基于该相机,专业人员手动控制无人机以执行极其敏捷的飞行操作。飞行是在植被、池塘和建筑物的农田上方进行的 (见图19 (b),(c))。在飞行过程中执行了几种激进的动作,包括极快的滚动翻转 (见图19 (e1)-(e3)),俯冲和横向加速。在翻转期间,角速度达到59.37 rad/s,超过IMU测量范围35 rad/s。

进行了两次飞行都成功了。由于空间限制,仅展示一次飞行的结果。建图结果如图19 (d1)-(d3) 所示,可以看出所构造的地图与地面上易于区分的精细结构 (例如树木和建筑物) 一致。

欧拉角旋转、位置和速度的估计如图20 (a) 所示,角速度与IMU测量值的估计如图20 (b) 所示。可以看到,即使在极端激进的运动下,也能够估计无人机的状态。一个轴上的最大速度达到14.63 m/s,最大加速度达到30 m/s,角速度达到59 rad/s。此外,LiDAR偶尔会面对天空,导致没有LiDAR测量,但是状态仍然能稳定地被估计。
7.2. 自转无人机
Livox Avia LiDAR位于UAV前方,当UAV经历连续yaw旋转时,FoV会快速变化。IMU是LiDAR内置的,测量范围为17.5 rad/s,而无人机的平均yaw角速度约为25 rad/s。无人机还配备了基于ARM的低功耗计算机Khadas VIM3 Pro,该计算机具有2.2 GHz四核Cortex-A73 CPU和4 GB RAM。机载计算机运行Point-LIO实时估计无人机状态,估计的状态输入给飞行控制器Pixhawk 4 Mini,以执行实时控制任务。

使用这种无人机进行了两个实验,一个是香港大学Haking Wong楼外的室外实验,如图21 (a1) 和 (a2) 所示,另一个是在图21(b1)和(b2)所示的杂乱无章的实验室进行的室内实验。两个实验的实时建图结果如图21所示, (c) 为室外,(d) 为室内。两个环境都能成功建图,且没有明显的重影。
图22 (a) 和 (b) 分别进一步示出了运动学状态 (即旋转,位置和速度),角速度和加速度的估计。在53-55s的时间间隔内放大了这些图,以更好地显示估计结果。可以看出:
- 尽管IMU在中间饱和以及快速旋转引起的快速FoV变化,仍可以产生与IMU测量一致的稳定状态估计。
- 每个LiDAR包的平均处理时间为14.63 ms,而LiDAR包的速率为50Hz,确保了实时性能。实验也证实了这一点,其中控制器能够通过实时状态反馈执行稳定的受控飞行。
8. 总结
Point-LIO是一个鲁棒的高带宽LIO框架:
- 基于一种新颖的逐点更新方案,在每个点的真实采样时间更新系统状态,而无需将点累积到帧中。消除点累积消除了长期存在的帧内运动失真,并允许以接近点采样率 (4-8 kHz) 的高里程计输出,这进一步使系统能够跟踪非常快的运动
- 为了进一步将系统带宽提高到IMU测量范围之外,将有色随机过程扩展到运动学模型中,将IMU测量作为系统输出
所开发系统的带宽、鲁棒性、精度和计算效率已在具有极其剧烈运动的现实世界的实验,以及具有多种LiDAR类型、环境和运动模式的公共数据集上进行了详尽的测试。在所有测试中,Point-LIO都实现了与其他最先进的LIO算法相当的计算效率和里程计精度,同时显著提高了系统带宽。作为里程计,Point-LIO可以用于各种自主任务,例如轨迹规划、控制和感知,尤其是在涉及非常快的自运动的情况下 (例如,在存在剧烈振动和高角速度或线速度的情况下) 或需要高速里程计输出和建图 (例如,用于高速反馈控制和感知)。将来可以在没有惯性测量的LiDAR系统,以及动态物体检测系统中探索逐点策略。
参考文献
Point-LIO: Robust High-Bandwidth Light Detection and Ranging Inertial Odometry
Point-LIO:鲁棒高带宽激光惯性里程计 - 知乎
代码浅析Point-LIO
Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry-CSDN博客
这篇关于Point-LIO:鲁棒高带宽激光惯性里程计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!