point专题

时间序列|change point detection
change point detection 被称为变点检测,其基本定义是在一个序列或过程中,当某个统计特性(分布类型、分布参数)在某时间点受系统性因素而非偶然因素影响发生变化,我们就称该时间点为变点。变点识别即利用统计量或统计方法或机器学习方法将该变点位置估计出来。 Change Point Detection的类型 online 指连续观察某一随机过程,监测到变点时停止检验,不运用到

COD论文笔记 ECCV2024 Just a Hint: Point-Supervised Camouflaged Object Detection
这篇论文的主要动机、现有方法的不足、拟解决的问题、主要贡献和创新点: 1. 动机 伪装物体检测(Camouflaged Object Detection, COD)旨在检测隐藏在环境中的伪装物体,这是一个具有挑战性的任务。由于伪装物体与背景的细微差别和模糊的边界,手动标注像素级的物体非常耗时,例如每张图片可能需要 60 分钟来标注。因此,作者希望通过减少标注负担,提出了一种仅依赖“点标注”的弱

POL(Point-of-Load)负载点电源
负载点(POL)电源在靠近负载处单独放置电源调节器(线性稳压器或DC-DC),解决了高性能半导体器件,例如:微控制器、ASIC等,所面临的高峰值电流、低噪声裕量等设计挑战。 一般我们会把负载点电源尽量靠近负载放置, 这么做可以最大限度地确保供电效率和准确性。 图 1 常见POL电源的拓扑结构 Typical设计POL设计

【译】PCL官网教程翻译(17):快速点特征直方图(FPFH)描述符 -Fast Point Feature Histograms (FPFH) descriptors
英文原文阅读 快速点特征直方图(FPFH)描述符 计算复杂度直方图(见点特征直方图(PFH)描述符)对于一个给定的有 n n n个点的点云 P P P为 O ( n k 2 ) O (nk ^ 2) O(nk2), k k k是每个点P的最邻近点个数。对于要求实时或接近实时的应用程序,密集点的特征直方图的计算效率是一个一个主要问题。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPF

【译】PCL官网教程翻译(16):点特征直方图(PFH)描述符 -Point Feature Histograms (PFH) descriptors
英文原网页查看。 点特征直方图(PFH)描述符 就点特征表示而言,表面法线和曲率估计是在表示特定点周围的基本的几何形状方面。虽然计算速度极快,也很容易,但是它们不能捕捉太多的细节,因为它们只能用很少的值来近似一个点的k邻域的几何形状。直接的结果是,大多数场景将包含许多具有相同或非常相似的特征值的点,从而减少了它们的信息特征。 本教程介绍了一组为简单起见而创建的3D特征描述符PFH(点特征直方图

【CVPR‘24】深度补全:Flexible Depth Completion for Sparse and Varying Point Densities
【CVPR'24】深度补全:Flexible Depth Completion for Sparse and Varying Point Densities 摘要1. 引言3. 方法3.1 基础深度估计架构3.2 基于亲和度的偏移校正3.3 校正置信度预测3.4 联合深度估计与完成3.5 损失 4. 实验4.1 数据集和评估指标4.2 实验概述4.3 消融研究 参考文献 摘要

mount: already mounted or busy. 、mount:already mounted or mount point busy.
错误:mount: already mounted or busy. 、mount:already mounted or mount point busy. 最近在装几台虚拟机,其中一台ubuntu,由于为了把磁盘文件分开,所以单独做了规划,单独mount,因为自己是一个优秀的销售员、创业者、经理人、程guan序li员yuan。所以直接copy了硬盘文件。由于mount后没写入fstab,所以m
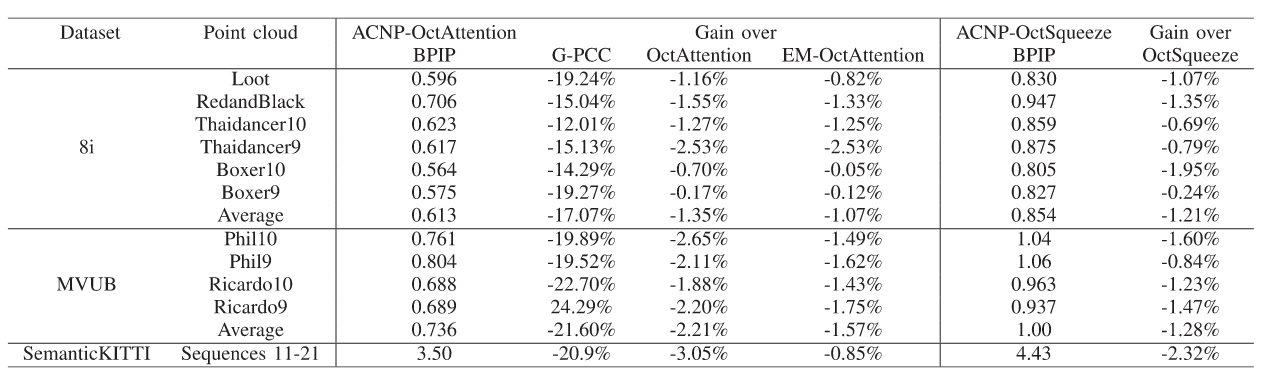
Enhancing Octree-Based Context Models for Point Cloud Geometry Compression 论文笔记
1. 论文基本信息 发布于: IEEE SPL 2024 2. 创新点 分析了基于 one-hot 编码的交叉熵损失函数为什么不能准确衡量标签与预测概率分布之间的差异。介绍了 ACNP 模块,该模块通过预测占用的子节点数量来增强上下文模型的表现。实验证明了ACNP模块在基于八叉树的上下文模型中的有效性。 3. 背景 现有上下文模型的局限性: 现有的上下文模型使用交叉熵作为损失函
XMG 重写- (UIView *)hitTest:(CGPoint)point withEvent:(UIEvent *)event方法
//重写这个方法,来完成一些指定的事件。比如说按钮被遮到下面了,但是我想让点击到这块区域的时候让按钮去相应点击 - (UIView *)hitTest:(CGPoint)point withEvent:(UIEvent *)event { // 当前坐标系上的点转换到按钮上的点 CGPoint btnP = [self convertPoint:point toVi
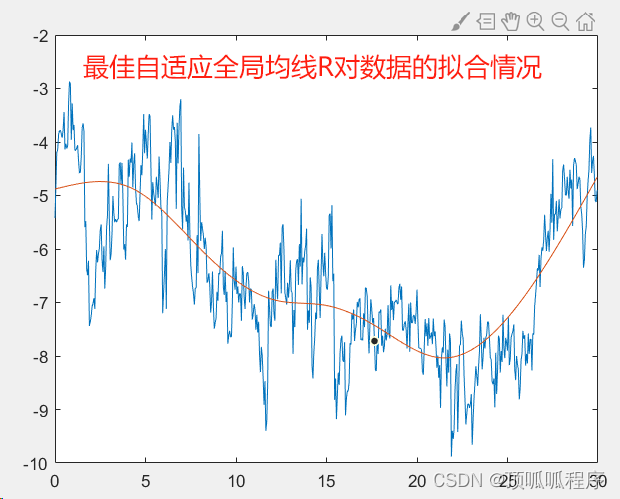
2-8 基于matlab的ESMD(Extreme-Point Symmetric Mode Decomposition)信号分解算法
基于matlab的ESMD(Extreme-Point Symmetric Mode Decomposition)信号分解算法,其基本思想是通过寻找数据序列中的极大值点和极小值点,并以此为基础进行信号分解。该方法在观测数据的趋势分离、异常诊断和时-频分析方面具有独特优势。程序已调通,可直接运行。 2-8 matlab ESMD 信号分解算法 - 小红书 (xiaohongshu.com)

Eight-point algorithm
转载地址:https://en.wikipedia.org/wiki/Eight-point_algorithm 在 2D-2D VO中,当已知内参矩阵K,需要求解 本征矩阵E ;当不知道K时,需要求解基础矩阵F ; 8点法可以用来求解E,F;实际中 the normalized eight-point algorithm更适用于求F。 ******** 番外篇Total
严重: Failed to initialize end point associated with ProtocolHandler [ajp-apr-8009] java.lang.Except
端口号8009被占用,这里提供查询出被占用的进程,杀掉他 Step 1:运行 -> cmd Step 2:命令窗口中输入:netstat -ano|findstr 8009,使用该命令可查出占用该端口的进程PID,这里是8903。 Step 3:使用taskkill /f /pid 8903,如果显示终止成功,则表明OK了,此时再去启动Tomcat,问题就不存在了。
![codeforces MemSQL Start[c]UP 2.0 - Round 1 B. 4-point polyline](https://img-blog.csdn.net/20140728040247938)
codeforces MemSQL Start[c]UP 2.0 - Round 1 B. 4-point polyline
其实这是一道很简单的题... 给出(n, m),可以得到一个矩形 让你依次连接矩形内的4个点使它们的长度和最长,而这三条线段可以相交、交叉 遇到这种情况,首先要想到对角线... 出去n==0 m==0的特判可以分4种情况: 这么一来列出4种情况总长度,取最大值对应的即可 代码如下: #include <cmath>#include <cstdio>#include <c

Talk|CVPR‘24 Oral:超越3D - Point Transformer V3中的多模态特征提取新构想
本期为TechBeat人工智能社区第599期线上Talk。 北京时间6月12日(周三)20:00,香港大学博士生—吴虓杨的Talk已经准时在TechBeat人工智能社区开播! 他与大家分享的主题是: “超越3D - Point Transformer V3中的多模态特征提取新构想”,他通过PTv3的两个核心思想——骨干网络设计的规模准则与非结构化数据的序列化技术,探究3D点云骨干网络作为一种多

【GreenHills】GHS-Point导致的调试HardFault错误
【更多软件使用问题请点击亿道电子官方网站】 1、 文档背景 该客户使用的IDE为S32 Design Studio for ARM ,使用的编译器为GHS compiler,调试器为PE。 客户在使用Ceil函数进行函数调用时,编译可以正常通过,但调试无法成功运行。 并且出现下方错误信息: UsageFault: The processor has attempted to
机器学习笔记 - 用于3D数据分类、分割的Point Net简述
一、简述 在本文中,我们将了解Point Net,目前,处理图像数据的方法有很多。从传统的计算机视觉方法到使用卷积神经网络到Transformer方法,几乎任何 2D 图像应用都会有某种现有的方法。然而,当涉及到 3D 数据时,现成的工具和方法并不那么丰富。3D 空间中一个工具就是Point Net。点网是一种新型的神经网络,直接使用整个点云。 它可以对输入点云
机器学习笔记 - 用于3D数据分类、分割的Point Net的网络实现
上一篇,我们大致了解了Point Net的原理,这里我们要进行一下实现。 机器学习笔记 - 用于3D数据分类、分割的Point Net简述-CSDN博客文章浏览阅读3次。在本文中,我们将了解Point Net,目前,处理图像数据的方法有很多。从传统的计算机视觉方法到使用卷积神经网络到Transformer方法,几乎任何 2D 图像应用都会有某种现有的方法。然而,当涉及到 3D 数

cocos2d anchor point 锚点解析
anchor point 究竟是怎么回事? 之所以造成不容易理解的是因为我们平时看待一个图片是 以图片的中心点 这一个维度来决定图片的位置的。而在cocos2d中决定一个 图片的位置是由两个维度 一个是 position 也就是图片的中心点 另外一个是anchor point。只要我们搞清楚他们的关系,自然就迎刃而解。 他们的关系是这样的: actualPosition.x = pos

点云语义分割:论文阅读简记 -Spatial Transformer Point Convolution
[1] Spatial Transformer Point Convolution 为了满足点云置换不变性问题,以往的方法通过max或者sum来进行特征聚合,但是这种操作是各向同的,不能更好的建模局部几何结构。本文提出spatial transformer point convolution试图实现各相异性的滤波器。引入空间方向字典来捕获点云的几何结构。利用方向字典学习将无序的邻居转换成规范有序

3D 论文阅读 PointContrast: Unsupervised Pre-training for 3D Point Cloud Understanding简记
PointContrast: Unsupervised Pre-training for 3D Point Cloud Understanding 摘要PointContrast Pre-training实验结果 摘要 简单记一下Charles R. Qi的新作 PointContrast: Unsupervised Pre-training for 3D Point Clou
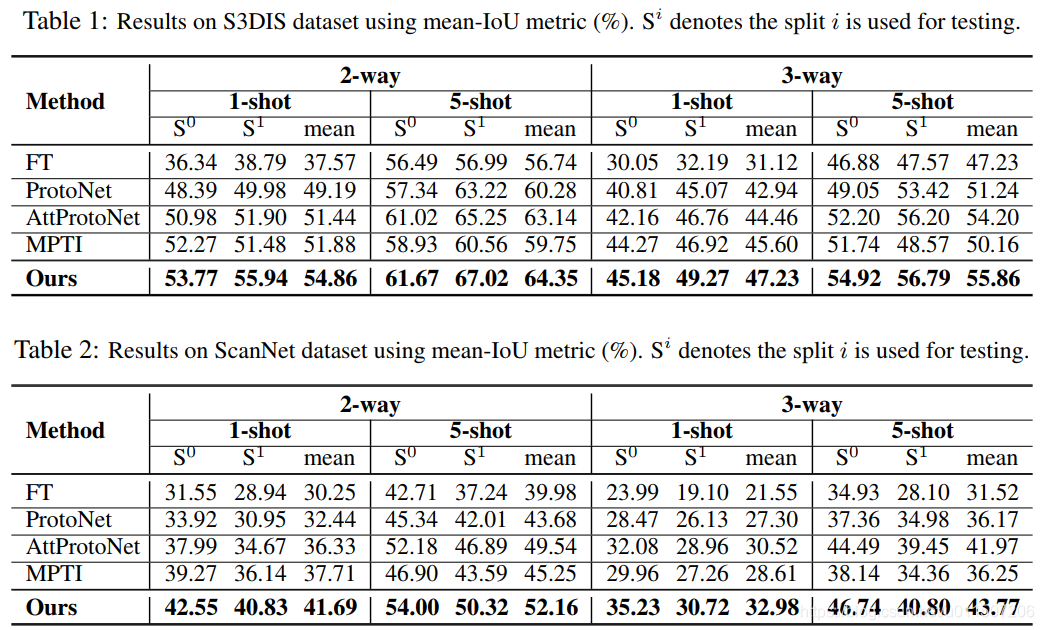
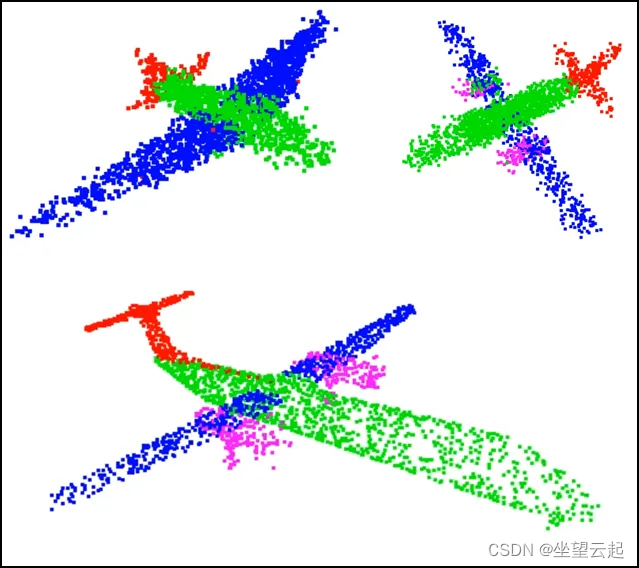
Few-shot 3D Point Cloud Semantic Segmentation 论文简记
Few-shot 3D Point Cloud Semantic Segmentation 论文简记 摘要 已有的点云语义分割方法需要大量的标签,点云逐点标记是困难的,另外对新的类别较差的泛化性。因此本文提出一个显著感知的多原型转化few-shot 分割方法。 具体地,每个类可以表示为多个原型来建模复杂分布地点云数据。然后,设计一个标签传播方法,来探索标注点和未标记点的多原型亲和度,以及未标注

3D点云论阅读:ShellNet:Efficient Point Cloud Convolutional Neural Networks using Concentric Shells Statics
论文:http://openaccess.thecvf.com/content_ICCV_2019/papers/Zhang_ShellNet_Efficient_Point_Cloud_Convolutional_Neural_Networks_Using_Concentric_Shells_ICCV_2019_paper.pdf 源码:https://github.com/hkust-vgd
步态控制之捕获点(Capture Point,CP)
捕获点(Capture Point,CP) 捕获点(Capture Point,CP)是机器人学中的一个重要概念,用于评估和控制机器人步态的稳定性。捕获点表示机器人需要踏出的下一步位置,以确保在动态条件下的稳定性。它特别适用于步态控制和动态行走控制。 应用捕获点进行步态控制 捕获点在步态控制中的应用主要包括: 步态生成:通过捕获点确定下一步的位置和时间,生成稳定的步态。平衡控制:实时计算捕
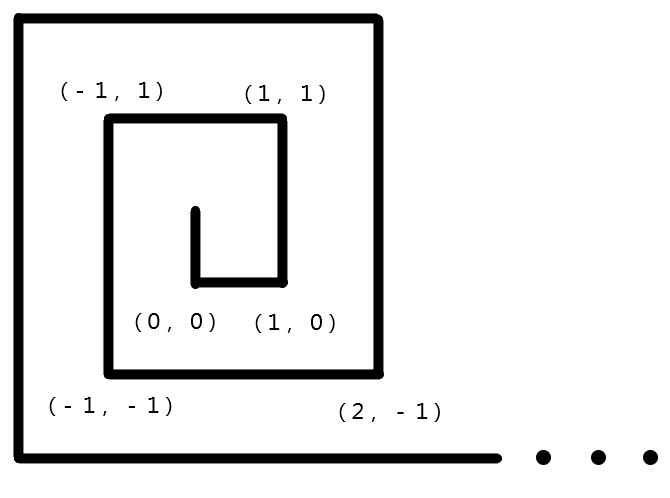
CF279A Point on Spiral 题解
解题思路 按照题目中的规律画出来的图片如下: 那么,我们直接根据规律判断当前查询的节点在那一条线段上就可以了。易得,当前的基础转向次数为 max ( ∣ x ∣ − 1 , ∣ y ∣ − 1 ) × 4 (|x|-1,|y|-1)\times 4 (∣x∣−1,∣y∣−1)×4,那么加上一个在当前周期内部的转向次数就可以了。 AC 代码 #include<bits/stdc++.h>

Point-LIO:鲁棒高带宽激光惯性里程计
1. 动机 现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。 2. 主要贡献 1) 提出了一种逐
UVA - 11768 Lattice Point or Not (拓展gcd)
Now a days a very common problem is:“The coordinate of two points in Cartesian coordinate system is (200, 300) and(4000, 5000). If these two points are connected we get a line segment. How manylattice