惯性专题

EmotionIC:受情感惯性和传染驱动的依赖建模用于对话中情绪识别
论文地址 https://doi.org/10.1007/s11432-023-3908-6 项目代码 https://github.com/lijfrank-open/EmotionIC 关键词 对话情绪识别,情感惯性和传染,多头注意力,门控循环单元,条件随机场 研究意义 对话中情绪识别(ERC)是自然语言处理(NLP)中最受关注的研究领域之一,旨在识别对话中每个话语的情感。由于这
![[ 轻知识 ] 什么是3DoF、6DoF?以及关于惯性测量单元等等](https://i-blog.csdnimg.cn/blog_migrate/10d5ccbb03ccd5bc81409eaa03916392.png)
[ 轻知识 ] 什么是3DoF、6DoF?以及关于惯性测量单元等等
本文将简单介绍运动中的“自由度”,这是讨论VR机制的必要概念。自由度(DoF)与刚体在空间内的运动相关,可以解释为“物体移动的不同基本方式”。 自由度总共有6个,可分成两种不同的类型:平移和旋转。 1. 平移运动 刚体可以在3个自由度中平移:向前/向后,向上/向下,向左/向右。 图自增强现实产业联盟 2. 旋转运动 刚体也可以在3个自由度中

【开源分享】VIDO-SLAM:一种视觉惯性动态物体SLAM系统
文章:Inertial-Only Optimization for Visual-Inertial Initialization 作者:Carlos Campos, Jose M.M. Montiel and Juan D. Tard ´ os´ 代码:https://github.com/bxh1/VIDO-SLAM.git 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加

轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,

实现监听NestedScrollView拖拽、惯性滑动、滑动停止、滑动到顶部和底部
运行实时监听日志: 因为在开发中经常会需要在滚动的各种状态下处理一些UI界面功能,但是系统又没有提供实时监听拖拽、惯性滑动、滑动停止、滑动到顶部和底部等功能。那怎么办,只能自己去实现这些功能。 滚动的几种状态 /*** 滚动状态*/public enum ScrollState{DRAG, // 拖拽中SCROLLING, // 正在滚动IDLE

产品为何总是做不好 (六): Product Owner 惯性的行为
2016.9.3, 北京, Ken Fang 回顾这近二十年的敏捷、软件工程的旅程,我的收获是相当的丰富的;尤其是我面对面了许多不同层级的部门领导、数千位的团队成员, 使我能不断的验证了 “人类惯性的行为“ 对团队开发效率与产品质量 (品味)的影响。 1. 当 Product Owner 惯性的行为, 只是希望能在某月某日交付版本。 2. 当 Product Owner 惯性的行为,

Point-LIO:鲁棒高带宽激光惯性里程计
1. 动机 现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。 2. 主要贡献 1) 提出了一种逐

计算机视觉与深度学习 | 视觉里程计VO及惯性系统
视觉里程计VO及惯性系统 时间:2017.9.14 8:50 作者:Michael Beechan 前端视觉里程计:根据相邻图像信息估计粗略的相机运动,给后端提供初始值。 VO的实现方法(是否提取特征):特征点法和直接法。 VO的主要问题是如何根据图像来估计相机运动。 角点检测方法:SIFT,SURF,ORB等。 特征点性质:1.可重复性 2.可区别性 3.高效性 4.本地性 h

HarmonyOS Next开发----k线图滑动惯性
K线图的惯性滑动,由于官方提供的Scroller没有设置初始位置的方法,不知道后面会不会支持。由于项目急着上线,所以只有采用另一种方案,滑动结束后模拟计算惯性滑动。 思路: 手指滑动结束后,k线惯性滑动轨迹,类似于匀减速运动。所以可以用个定时器,每个100ms让k线继续平移一段距离,只需要计算出每个时刻的速度即可。对于手指离开屏幕时的速度,可以用平均速度来代替。 class SlideIne
【惯性传感器imu】—— WHEELTEC的惯导模块的imu的驱动安装配置和运行
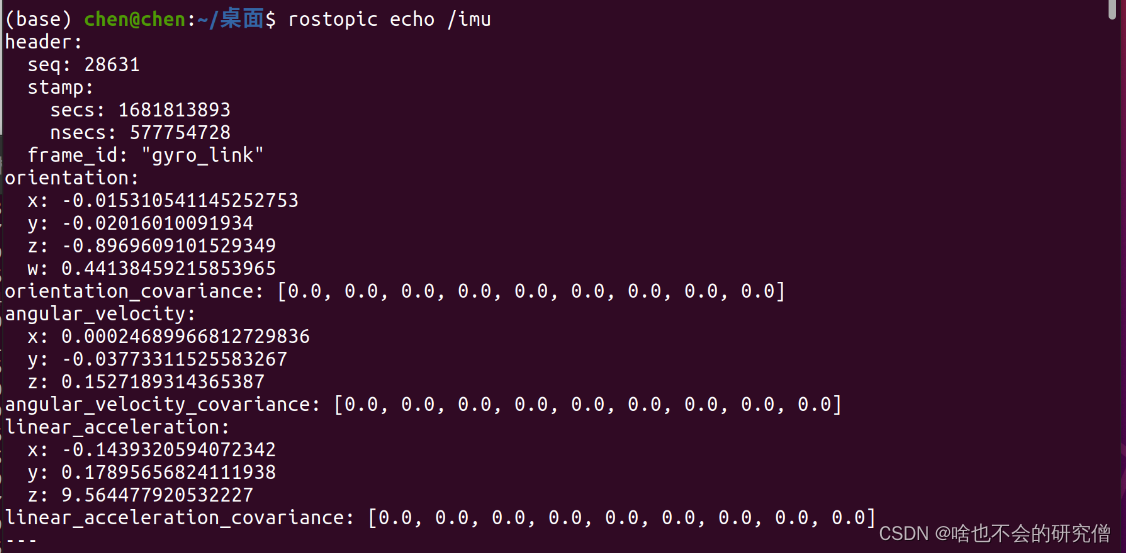
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、IMU驱动安装1. 安装依赖2. 源码的下载3. 编译源码(1) 配置固定串口设备(2) 修改luanch文件(3) 编译 二、启动IMU1. 运行imu2. 查看imu数据 总结 前言 WHEELTEC的惯导模块使用惯性测量单元(IMU),是一种用于感知车辆运动状态的关键技术。IM
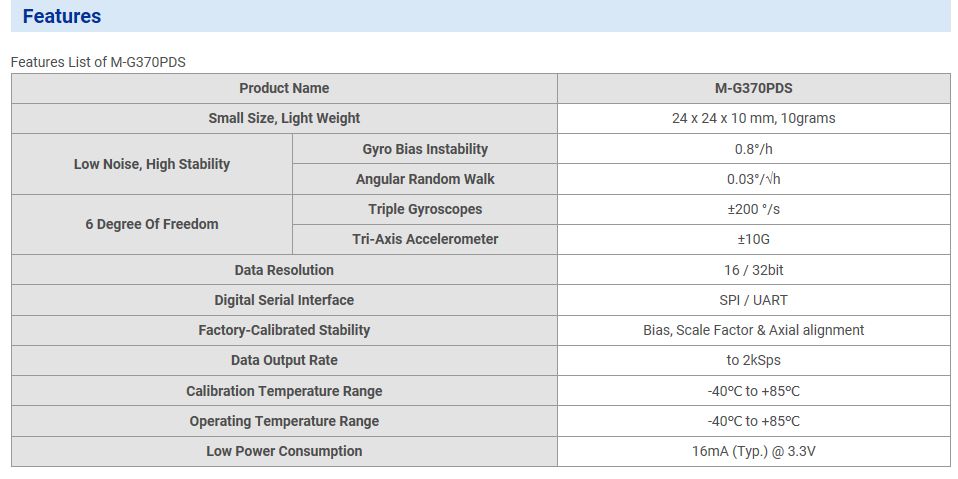
适合多种苛刻环境的惯性测量单元M-G370PDS
全球IMU市场d在汽车和机器人技术进步和不断增长的应用需求,保持着高速增长的趋势,其中航空航天、国防和汽车等行业对高精度、稳定和紧凑的IMU需求尤为强烈,这些行业对精度和可靠性的高要求直接影响了相关技术的发展方向。 爱普生惯性测量单元M-G370PDS可以满足这些不断增长的需求,提供的解决方案不仅满足当前
拒绝惯性加班,拒绝透支未来
加班,这是一个因人、因时、因境而定的话题。 是否加班,因人而异。是指的是,不同人对加班和不加班文化有不同的认知和需要,有自己合理理由和规划的人和想法都值得尊重,因为他们做出的是深思熟虑后的理性选择,是在平衡了利弊之后做出的决定。 是否加班,因时而定。项目在攻坚期、紧急上限等场景加班是无可厚非的,但绝对不是一以贯之的长时间指令性或非指令性加班。不分时间的加班,一方面是自己对自己认知的偏差,另一方

搜维尔科技:Xsens惯性动捕+Manus手套用于游戏开发制作
用户名称:北京源力星聚网络科技有限公司(Bilibili控股子公司) 主要产品:Xsens MVN link *2 ,Manus手套*2 ,MVN Animate Pro软件等 使用培训现场 使用2套Xsens MVN link +2副Manus手套+Xsens Animate Pro软件为《伊苏:梦境交织的长夜》游戏人物录制 Manus VR手套 包含双人对打的各种动作
M-G552PC7 IMU(惯性测量单元)CAN接口
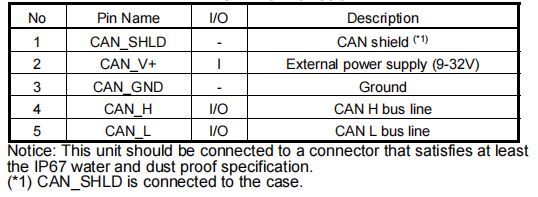
一般说明 M-G552PC7是一个小形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并使用高精度补偿技术提供高稳定性 和高精度的测量能力。 各种校准参数存储在IMU的内存中,并在IMU的电源被打开后自动反映在被发送到应用程序的测量数据中。 M-G552PCx通过控制器局域网(CAN)接口支持主机通信,减少了用户引入惯性测量的技术障碍,并最小化设计资源,以实现惯性

MATLAB - 自定义惯性矩阵
系列文章目录 前言 一、关键惯性约定 Simscape 多体软件在惯性定义中采用了一系列约定。请注意这些约定,因为如果手动进行惯性计算,这些约定可能会影响计算结果。如果您的惯性数据来自 CAD 应用程序或其他第三方软件,这些约定还可能影响到您需要对惯性数据进行哪些额外处理。特别是 惯性积的定义采用负数式,即在质量积分中明确插入减号。还有另一种方法,即在质
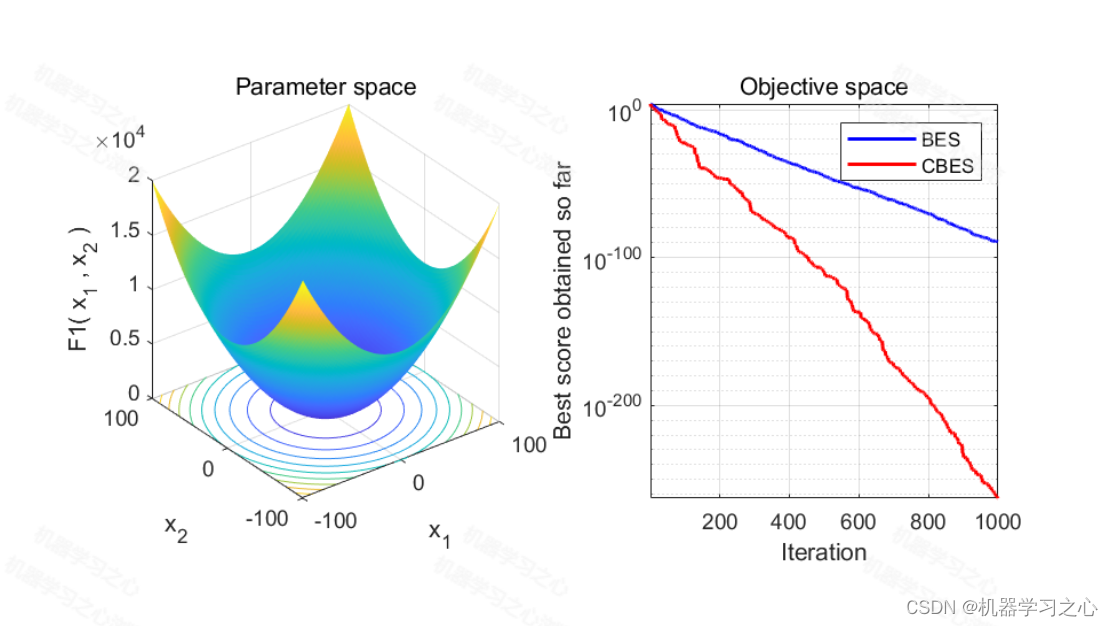
智能算法 | Matlab基于CBES融合自适应惯性权重和柯西变异的秃鹰搜索算法
智能算法 | Matlab基于CBES融合自适应惯性权重和柯西变异的秃鹰搜索算法 目录 智能算法 | Matlab基于CBES融合自适应惯性权重和柯西变异的秃鹰搜索算法效果一览基本介绍程序设计参考资料 效果一览 基本介绍 Matlab基于CBES融合自适应惯性权重和柯西变异的秃鹰搜索算法 融合自适应惯性权重和柯西变异的秃鹰搜索算法(CBES)是一种改进的搜索算法,旨
经典文献阅读之--LOG-LIO(高效局部几何信息估计的激光雷达惯性里程计)
0. 简介 局部几何信息即法线和点分布在基于激光雷达的同时定位与地图构建(SLAM)中是至关重要,因为它为数据关联提供了约束,进一步确定了优化方向,最终影响姿态的准确性。然而即使在使用KD树或体素图的辅助下,估计法线和点分布也是耗时的任务。为了实现快速法线估计,《LOG-LIO: A LiDAR-Inertial Odometry with Efficient Local Geometric I

数学建模【对粒子群算法中惯性权重和学习因子的改进】
一、改进原因 这是前面 数学建模【粒子群算法】 中的一部分,这里提到了w存在的一些问题,那么本篇介绍一些方法对w和因子进行一些改进,提高粒子群算法的效率和准确度。 二、改进方法 1.线性递减惯性权重 惯性权重w体现的是粒子继承先前的速度的能力,Shi,Y最先将惯性权重w引入到粒子群算法中,并分析指出一个较大的惯性权值有利于全局搜索,而一个较小的权值则更利于局部搜索。为了更好地平
笔记72:关于IMU(惯性测量单元)传感器的作用【不涉及公式推导】
一、IMU传感器是什么: 惯性测量单元IMU(Inertial Measurement Unit)是一种使用【加速度计】和【陀螺仪】来测量【物体三轴姿态角(空间姿态)】的装置;IMU在坐标系的每个坐标轴上,均安装有1个陀螺仪和1个加速度计(总计3个陀螺仪和3个加速度计),其中陀螺仪用来测量该轴上的角速度,加速度计用来测量该轴上的线性加速度;测量出来这6个值并不是最终的目的,IMU的目的是获得当前
Scrollview 嵌套 RecyclerView 及在Android 5.1版本滑动时 惯性消失问题
直接上代码 我这个scrollview因为业务需求做了滑动监听 解决惯性问题只需在onInterceptTouchEvent(MotionEvent e)方法里做处理就行 别的不需要考虑 简单 暴力 /*** 带滚动监听的Scrollview* 用于随着Scrollview的滑动更改状态栏的透明度*/public class MyScrollview extends Scro
[微语 20.12.30] 惯性
运动或者静止,都有保持原有形态的惯性。 让积极良好的行为、修为成为一种惯性,是个很不错的举措。 有了惯性,可能就比较容易克服障碍,有着不自觉向前一步的习惯,这应该是克制惰性的比较好的方法。 多想多动,习惯成自然,也就不会觉得很难了。

基于混沌收敛因子和惯性权重的鲸鱼优化算法
文章目录 一、理论基础1、鲸鱼优化算法2、改进的鲸鱼优化算法(1)增强种群多样性的初始化策略(2)混沌收敛因子和惯性权重协同更新策略(3)多项式变异策略 二、仿真实验与结果分析三、参考文献 一、理论基础 1、鲸鱼优化算法 请参考这里。 2、改进的鲸鱼优化算法 (1)增强种群多样性的初始化策略 采用随机方法产生初始种群不能保证初始种群较好地覆盖待优化问题的寻优空间,导致初

支持元素惯性拖放和多点触摸手势的js插件
interact.js是一款支持元素惯性拖放和多点触摸手势的 js插件。该插件支持在桌面设备和移动手机设备中拖放元素,拖动结束时带有惯性效果。并且支持移动设备的多点触摸手势。它的特点有: 带惯性和吸附效果支持多元互动跨浏览器和设备,支持桌面和移动版本的Chrome, Firefox 和 Opera浏览器以及IE8+浏览器可以和SVG元素相互作用轻量级,无任何外部依赖除非要支持IE8或修改鼠

Matlab/simulink 风储联合,风储调频控制,风储并网无穷大系统,直流母线电压稳定。双馈风机,下垂,虚拟惯性,超速减载控制。
simulink系统自己带有风机,但是那个不能改参数,自己看看就明白了。 本文中的风机为自己构建,参数可调。 1-上述为风储联合并网无穷大系统,主要是复现了风电的调频控制,储能采用下垂控制,风电,虚拟惯性,下垂超速减载都有。这是无穷大系统,实际系统四机两区,三机九节点等,看我其他文章。 2-储能蓄电池电容混合充电,主要目的是为了研究中间直流母线电压保持不变。蓄电池储能和电容的混合充电。
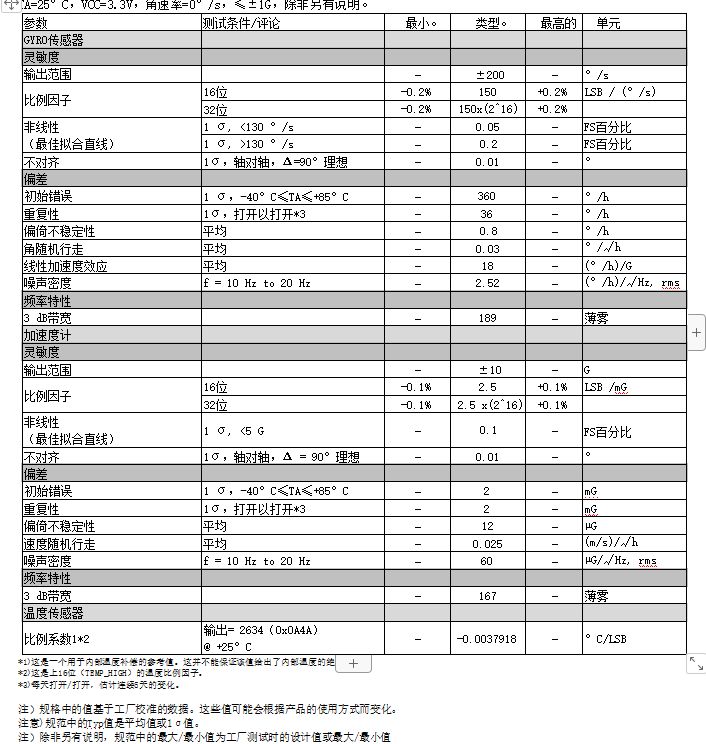
M-G370PDS惯性测量单元(IMU)
M-G370PDS0是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并提供高稳定性和高精度的测量能力 精密补偿技术。各种校准参数被存储在IMU的存储器中,并且是 在IMU的电源被打开后,自动反映在被发送到应用程序的测量数据中。M-G370PDS0通过支持对主机通信的通用SPI/UART功能,减少了用户可以使用