本文主要是介绍笔记72:关于IMU(惯性测量单元)传感器的作用【不涉及公式推导】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、IMU传感器是什么:
- 惯性测量单元IMU(Inertial Measurement Unit)是一种使用【加速度计】和【陀螺仪】来测量【物体三轴姿态角(空间姿态)】的装置;
- IMU在坐标系的每个坐标轴上,均安装有1个陀螺仪和1个加速度计(总计3个陀螺仪和3个加速度计),其中陀螺仪用来测量该轴上的角速度,加速度计用来测量该轴上的线性加速度;
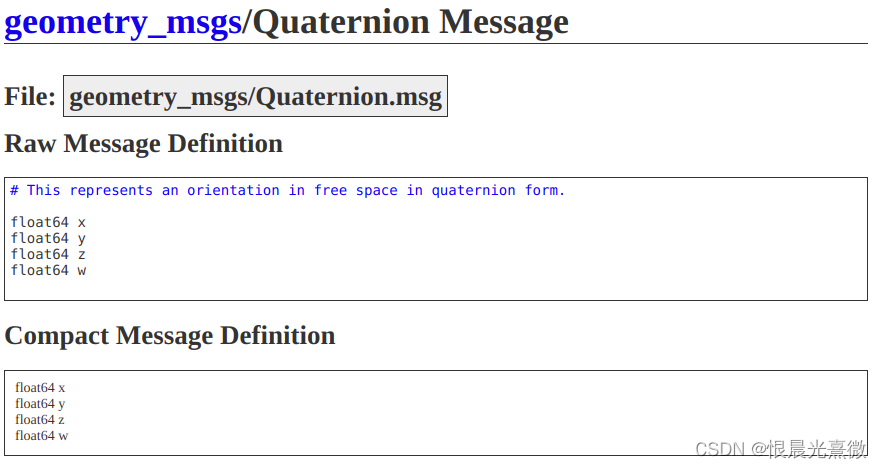
- 测量出来这6个值并不是最终的目的,IMU的目的是获得当前时刻下机器人的姿态信息xyzw(一共有4个数,分别是偏航角/俯仰角/横滚角/w值)(之所以多加了一个w值来描述机器人的姿态,是因为如果只是用欧拉角描述--即xyz描述,在某些姿态下会产生一种叫做万向锁的问题,因此一位数学家发明了一种叫做Quaternion的方法,即使用xyzw四个值描述机器人姿态的方法);
- 通过3个陀螺仪测量得到的3个角速度值,计算得到机器人姿态;通过3个加速度计测量得到3个线性加速度值,计算得到机器人姿态;然后将两个姿态对比融合,得到真正的姿态;
参考文章:
什么是IMU? - 古月居
通俗易懂的IMU讲解,这一篇就够了-CSDN博客
二、IMU传感器输出的数据信息
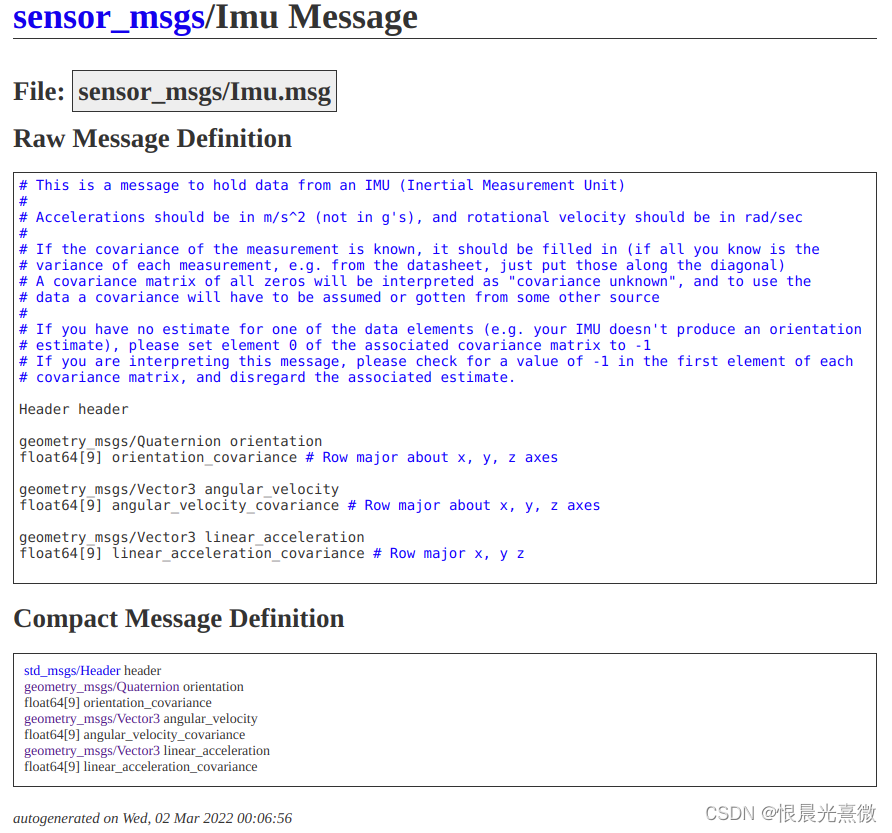

- 角速度:angular_velocity
- 线性加速度:linear_acceleration
- 融合姿态:orientation
三、如何使用陀螺仪/加速度计计算机器人姿态
欧拉角说明:欧拉角说明 - 简书
加速度计解算姿态:加速度计解算姿态角_三轴加速度计算姿态角-CSDN博客
陀螺仪解算姿态 + 姿态融合:MPU6050姿态解算2-欧拉角&旋转矩阵-CSDN博客
这篇关于笔记72:关于IMU(惯性测量单元)传感器的作用【不涉及公式推导】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




