imu专题

IMU腕带评估轮椅用户运动健康
近期,美国的研究团队利用惯性测量单元(IMU)和机器学习来准确评估手动轮椅使用者的运动健康状况,这在康复训练和慢性病管理领域具有广阔的应用前景。 研究小组将运用高性能的IMU传感器固定到轮椅使用者佩戴的手腕带上,用来监测并记录轮椅推进过程中的运动数据。实验设置了不同强度的六分钟推力测试,结果证实仅使用IMU传感器就能准确捕捉到轮椅使用者的速度、距离和节奏变化,为心血管健康评估提供

IMU助力JAXA空间站机器人
近日,日本宇宙航空研究开发机构(JAXA)宣布,在国际空间站(ISS)实验舱“希望号”(Kibo)上部署的一款移动摄像机器人将采用Epson M-G370系列惯性测量单元(IMU)。IMU是一种能够检测物体运动状态的装置,通过测量加速度和角速度来确定物体的空间位置和姿态。这种技术对于在缺乏固定参照物的空间环境中尤为重要。 自2023年6月以来,“内部球形相机2号”(Internal Ball C

Azure_Kinect_ROS版编译及IMU参数标定.
Azure_Kinect_ROS版编译 参照官方文档:https://github.com/microsoft/Azure_Kinect_ROS_Driver/blob/melodic/docs/building.md 编译. 如果是ubuntu18.04等通过命令行安装SDK的,应该可以轻松编译成功.但是如果是在16.04上安装的(安装方法参照https://blog.csdn.net/u01
编译imu_utils时遇到的问题
https://blog.csdn.net/fang794735225/article/details/92804030 中提到了部分问题, 此外还有eigen找不到等问题,这些都好解决. 还有部分可能遇到的非常恶心的问题是: gcc , g++版本问题导致的ros link失败, 会出现如undefined reference ros::init等问题. 将其版本升级的5以上可解决: sud
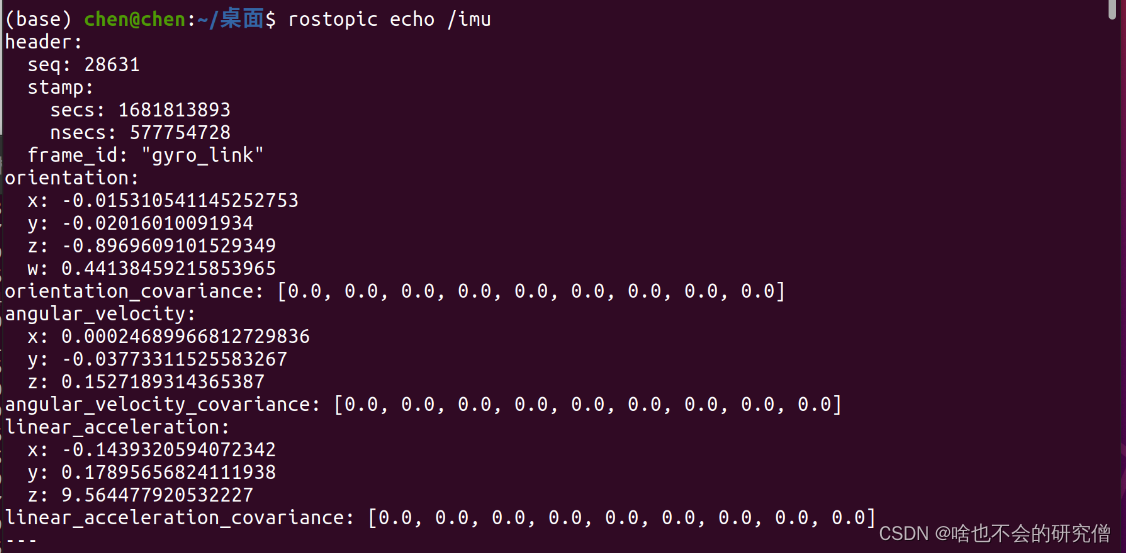
ROS imu传感器节点
imu是一种传感器,主要是控制机器人的姿态的,包括机器人在xyz轴(linear)的位置和机器人的俯仰,摇摆,旋转等在angular方向上的xyz。同样是通过ros中的topic话题通讯完成的。 #!/usr/bin/env python3#coding=utf-8import rospy# 数学模块提供pi的值,便于弧度转角度import mathfrom sensor
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,

【数据融合】基于卡尔曼滤波实现GPS-IMU数据融合附matlab代码
下面是一个简单的示例代码,用于基于卡尔曼滤波实现GPS-IMU数据融合的MATLAB实现: matlab % 初始化卡尔曼滤波器参数 dt = 0.1; % 时间步长 A = [1 dt; 0 1]; % 状态转移矩阵 B = [0.5*dt^2; dt]; % 输入控制矩阵 H = [1 0]; % 观测矩阵 Q = eye(2); % 状态噪声协方差矩阵 R_gps = 0.1; % GP
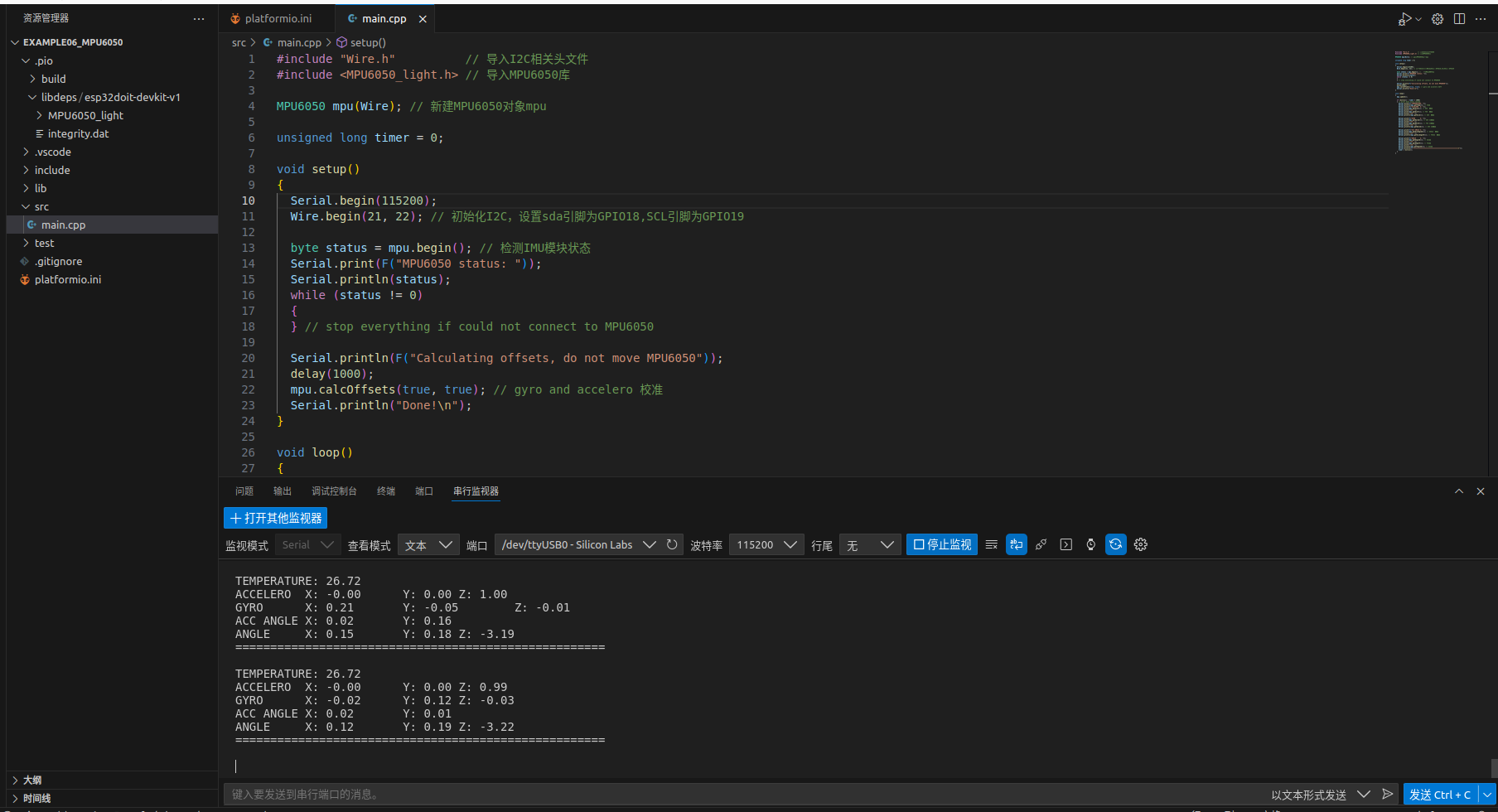
ROS2进阶 -- 硬件篇第五章第三节 -- PlateFormIO使用开源库驱动IMU——MPU6050
序: 上一节我们安装好了MPU6050的三方库,这一节我们尝试使用该库通过esp32将IMU模块驱动起来。 参考资料:小鱼——使用开源库驱动IMU 一、使用开源库驱动IMU 1. MPU6050介绍 首先我们了解下MPU6050模块,从外观看,长这个样子 MPU6050 为全球首例集成六轴传感器的运动处理组件,内置了运动融合引擎,用于手持和桌面的应用程序、游戏控制器、体感遥控以及其他消费

【附源码+代码注释】误差状态卡尔曼滤波(error-state Kalman Filter),扩展卡尔曼滤波,实现GPS+IMU融合,EKF ESKF GPS+IMU
2023年9月4日更新:重构代码,修复代码BUG,修复公式错误,统一坐标系。 2021年6月23日更新:发现了一个讲卡尔曼滤波特别好的视频,但是需要科学上网。卡尔曼滤波视频 最近在学习卡尔曼滤波器,今天抽出点儿时间总结一下! 我的所有源码都放在Github的仓库里面了:https://github.com/zm0612/eskf-gps-imu-fusion(记得要给我点star呀,哈哈
【惯性传感器imu】—— WHEELTEC的惯导模块的imu的驱动安装配置和运行
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、IMU驱动安装1. 安装依赖2. 源码的下载3. 编译源码(1) 配置固定串口设备(2) 修改luanch文件(3) 编译 二、启动IMU1. 运行imu2. 查看imu数据 总结 前言 WHEELTEC的惯导模块使用惯性测量单元(IMU),是一种用于感知车辆运动状态的关键技术。IM
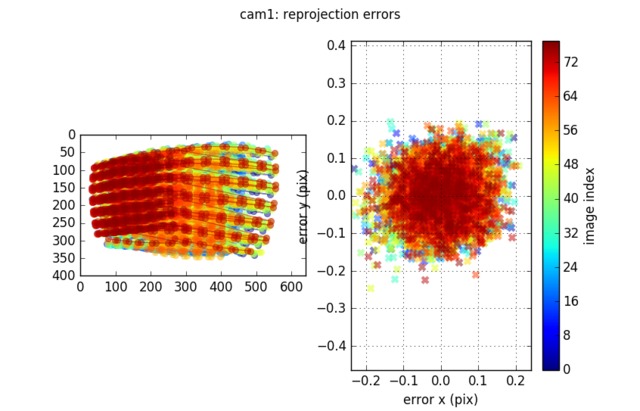
Kalibr 之 Camera-IMU 标定 (总结)
Overview 欢迎访问 持续更新:https://cgabc.xyz/posts/db22c2e6/ ethz-asl/kalibr is a toolbox that solves the following calibration problems: Multiple camera calibration: intrinsic and extrinsic calibration of

利用GNSS IMU集成提高车道级定位精度
准确的定位对于很多不同的事情都是至关重要的。导航系统可以引导我们去某个地方,自动驾驶汽车可以利用这些数据在道路上安全行驶。尽管全球导航卫星系统(GNSS)在定位方面非常出色,但它们可能并不总是提供最准确的车道水平事实。解决这个问题的一个有希望的方法是将GNSS模块与IMU(惯性测量单元)集成。在这篇博文中,我们将探讨GNSS IMU集成如何帮助提高车道水平定位的准确性。让我们来谈谈这项技术的所有伟

Google Cardboard与Oculus IMU融合算法
最近重新整理了IMU融合相关的代码实现,目前开源并有很好的运行效果的有Oculus(很久之前的SDK,最新版本融合Camera和IMU的SLAM定位版本已经不开源)和Google Cardboard,为了可以在普通手机设备上运行和调试,已将Oculus和Cardboard中IMU融合的代码提取出来,并使用简单的opengl场景展示了姿态追踪效果,整个工程使用Android Studio编译,可直接

ROS学习记录:用C++实现IMU航向锁定
前言 获取IMU数据的C++节点 在了解了如何获取到IMU的姿态信息(链接在上面)后,接下来尝试实现让一个节点在订阅IMU数据的时候,还能发布运动控制指令,使机器人能对姿态变化做出反应,达到一个航向锁定的效果。 一、实现步骤 二、开始操作 1、打开一个终端,输入cd ~/catkin_ws1/src,进入工作空间 2、输入 code . 打开VScode 3、在VScode

嵌入式基础课程配套电机FOC伺服电机开发板AT32F403磁编码IMU姿态
嵌入式基础课程配套电机FOC伺服电机开发板AT32F403磁编码IMU姿态 带你入门嵌入式有二十多年开发经验的老技骨做技术支持整个开发包硬件包括电机2205,支持12V到24V宽输入,配套12V2A电源。包装原理图和PCB嵌入式软件嵌入式基础课程 带你入门嵌入式 电机FOC开发板、伺服电机开发板,带磁编码器,IMU、Jlink、串口,12V电源,源代码、原理图、PCB全套都给你

IMU在羽球发球力中的应用
在羽毛球运动中,发球不仅是比赛得分的关键,其技术细节更是影响比赛走向的重要因素。近期,来自斯洛伐克和波兰的科研团队利用先进的IMU传感器技术,对顶尖选手的发球技巧进行了深度分析,旨在揭示不同发球方向对上身动作的影响。 研究中,四位国家精英级羽毛球运动员装备了包含13个IMU传感器的系统,这些传感器精准捕捉了发球至三个特定区域时,运动员上肢和骨盆关键关节的动作细节。从准备姿势、后摆
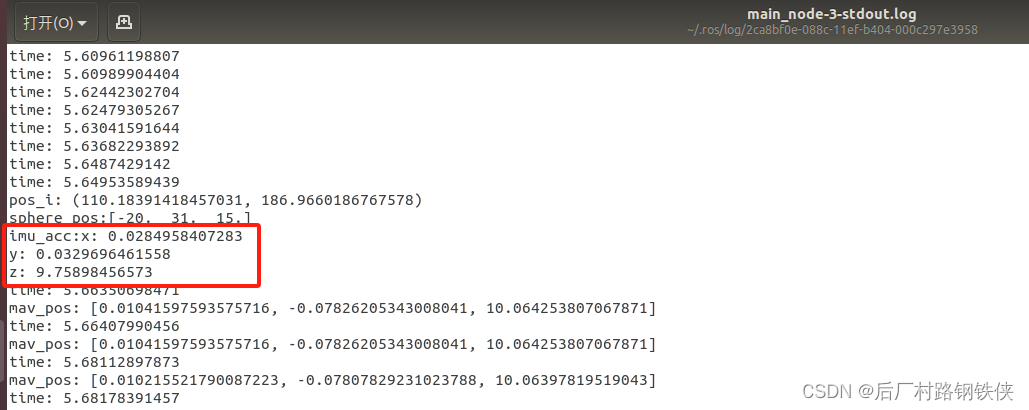
【画图】读取无人机IMU数据并打印成log用matlab分析
一、修改IMU频率 原来的imu没有加速度信息,查看加速度信息的指令为: rostopic echo /mavros/imu/data 修改imu频率,分别修改的是 原始IMU数据话题 /mavros/imu/data_raw。飞控计算过后的IMU数据 /mavros/imu/data rosrun mavros mavcmd long 511 105 10000 0 0 0 0 0r

日本宇宙航空研究“Int-Ball2”自由飞行相机机器人采用的Epson IMU
IMU有助于飞行的稳定控制和电池充电的自动对接- 精工爱普生公司(TSE:6724,“Epson”)很高兴地宣布,日本宇宙航空研究开发机构(JAXA)选择了爱普生M-G370系列的惯性测量单元(IMU),用于部署在国际空间站(ISS)的日本实验舱“Kibo”上的移动相机机器人。日本宇宙航空研究开发机构开发的“Int-Ball2(内部球相机2)”自由飞行相机机器人自2023年6月以来一直在Ki
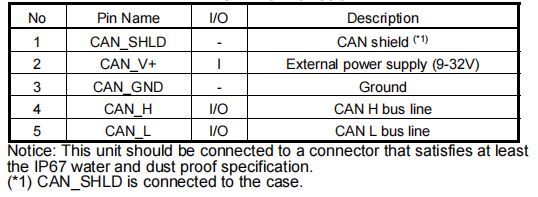
M-G552PC7 IMU(惯性测量单元)CAN接口
一般说明 M-G552PC7是一个小形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并使用高精度补偿技术提供高稳定性 和高精度的测量能力。 各种校准参数存储在IMU的内存中,并在IMU的电源被打开后自动反映在被发送到应用程序的测量数据中。 M-G552PCx通过控制器局域网(CAN)接口支持主机通信,减少了用户引入惯性测量的技术障碍,并最小化设计资源,以实现惯性

VINS-Mono 论文解读(IMU预积分残差+Marg边缘化)
目录 VIO引出原因: 融合方案: 本文贡献: 0、总体框架 0.1 数据预处理(IMU预积分见标题1) 0.2 初始化 A.滑动窗口(Sliding Window)纯视觉SfM B. 视觉惯性校准(IMU预积分与视觉结构对齐) 0.3 紧耦合后端非线性优化(IMU约束+视觉约束+闭环约束) A 公式 B IMU残差 C 视觉残差 D 边缘化 Marginalizat

IMU应用于膝关节功能评估
近日,来自中国的研究团队开发了一款基于IMU的可穿戴系统,用于评估膝关节骨关节炎引发的功能障碍。研究着重重验证该系统在测量步态及下肢功能方面的准确性,通过对比业界公认的运动捕捉和步态分析系统,评估IMU传感器在这一领域的性能。 实验测试结果显示,IMU传感器系统在时空步态参数测量上与黄金标准系统表现出良好的一致性,同样准确捕捉到了行走期间髋膝关节的活动范围。值得一提的是,这款IM

基于ES-EKF的LiDAR/GNSS/IMU传感器融合轨迹估计(附项目源码)
基于改进EKF的LiDAR/GNSS/IMU传感器融合轨迹估计(附项目源码) 算法概述PredictionCorrectionES-EKF算法融合算法实现轨迹估计实验结果 最近在研究传感器融合,看到一个很好的开源项目,适合小白学习,为以后做传感器融合、SLAM、自动驾驶和室内定位等方向打下基础。 算法概述 题目:基于改进扩展卡尔曼滤波(Error State-EKF)的LiD

不积跬步之IMU预积分
IMU预计分论文:On-Manifold Preintegration for Real-Time Visual-Inertial Odometry(http://arxiv.org/abs/1512.02363) IMU初始化论文:Visual-Inertial Monocular SLAM with Map Reuse(https://arxiv.org/abs/1610.05949
基于蓝牙和IMU的卡尔曼滤波融合算法、扩展卡尔曼滤波算法
前言 看了大量的多源融合室内定位论文,都绕不开卡尔曼滤波和扩展卡尔曼滤波算法。相当经典,但是又缺少代码。 由于计算机专业不学这些算法,因此理解起来难度还有点大。因此业余抽空复现了下,话不多说,直接上代码。 蓝牙和IMU的卡尔曼滤波融合 from filterpy.kalman import KalmanFilterimport numpy as npfrom scipy.linalg i

用于自动驾驶,无人驾驶领域的IMU六轴陀螺仪传感器:M-G370
用于自动驾驶,无人驾驶的IMU惯导模块六轴陀螺仪传感器:M-G370。自2020年,自动驾驶,无人驾驶已经迎来新突破,自动驾驶汽车作为道路交通体系的一员,要能做到的就是先判断周边是否有障碍物,自身的行驶是否会对其他交通参与成员产生危险。这就需要所谓的定位导航。而定位导航的关键就在于汽车中的IMU惯导模块。那么为什么说惯导模块是自动驾驶,无人驾驶的安全防线呢?什么样的惯导模块用于自动驾驶和无人驾驶是