本文主要是介绍不积跬步之IMU预积分,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
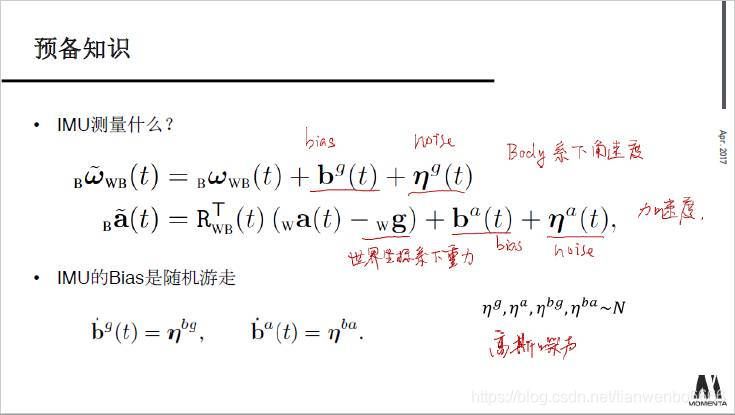
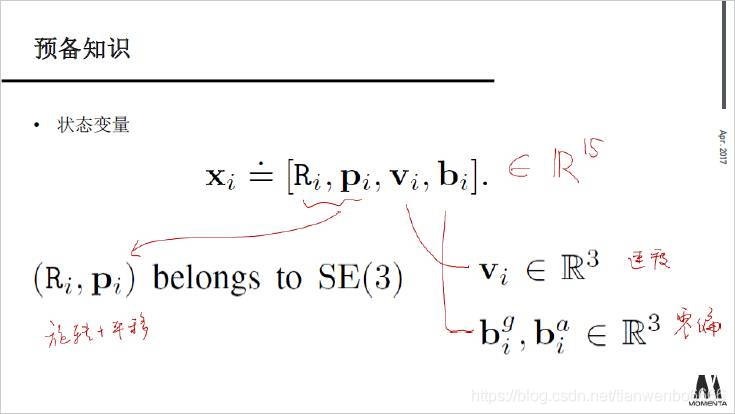
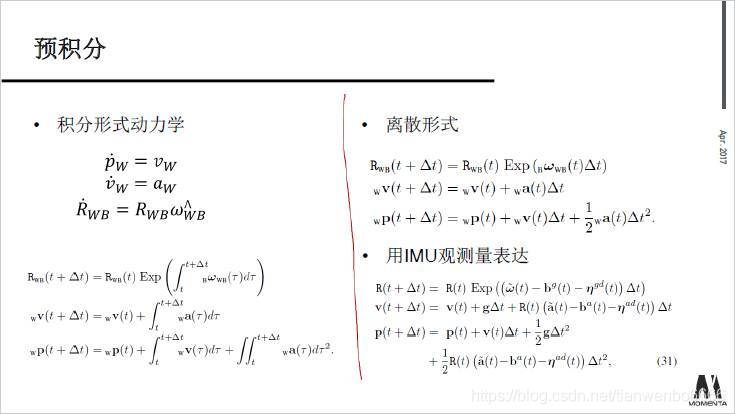
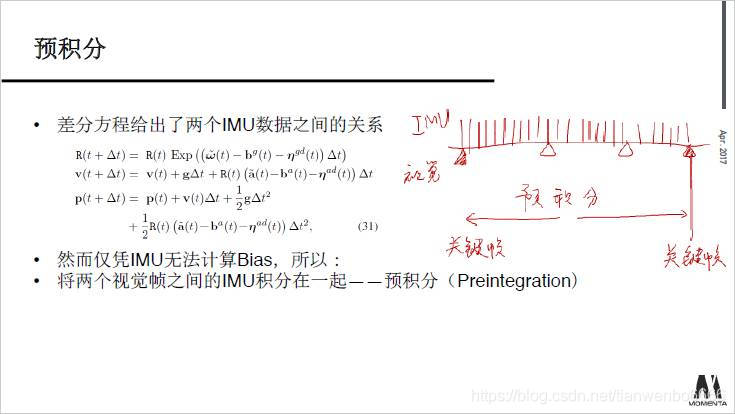
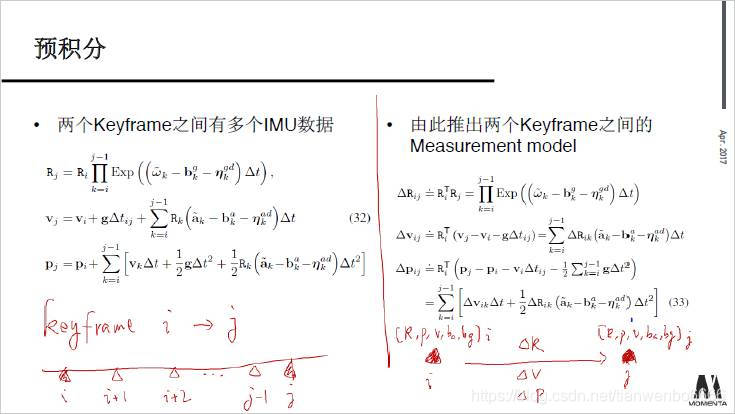
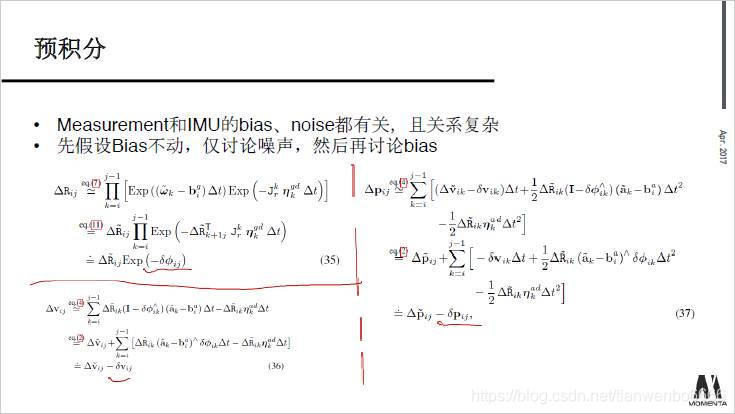
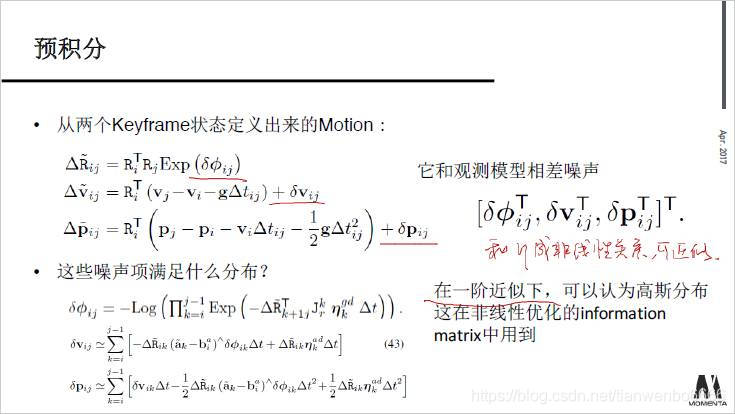
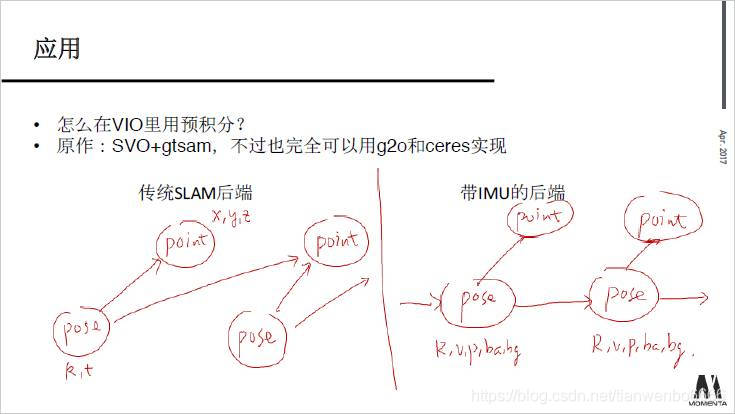
IMU预计分论文:On-Manifold Preintegration for Real-Time Visual-Inertial Odometry(http://arxiv.org/abs/1512.02363)
IMU初始化论文:Visual-Inertial Monocular SLAM with Map Reuse(https://arxiv.org/abs/1610.05949)


这篇关于不积跬步之IMU预积分的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





