测量专题

R语言统计分析——重复测量方差分析
参考资料:R语言实战【第2版】 所谓重复测量方差分析,即受试者被测量不止一次。本例使用数据集市co2数据集:因变量是二氧化碳吸收量(uptake),自变量是植物类型(Type)和七种水平的二氧化碳浓度(conc)。Type是组间因子,conc是组内因子。Type已经被存储为一个因子变量,还需要将conc转换为因子变量。分析过程如下: # 将conc变量转化为因子变量CO2$c

三维激光扫描点云配准外业棋盘的布设与棋盘坐标测量
文章目录 一、棋盘标定板准备二、棋盘标定板布设三、棋盘标定板坐标测量 一、棋盘标定板准备 三维激光扫描棋盘是用来校准和校正激光扫描仪的重要工具,主要用于提高扫描精度。棋盘标定板通常具有以下特点: 高对比度图案:通常是黑白相间的棋盘格,便于识别。已知尺寸:每个格子的尺寸是已知的,可以用于计算比例和调整。平面标定:帮助校准相机和激光扫描仪之间的位置关系。 使用方法 扫描棋盘:

【无线通信发展史⑧】测量地球质量?重力加速度g的测量?如何推导单摆周期公式?地球半径R是怎么测量出来的?
前言:用这几个问答形式来解读下我这个系列的来龙去脉。如果大家觉得本篇文章不水的话希望帮忙点赞收藏加关注,你们的鼓舞是我继续更新的动力。 我为什么会写这个系列呢? 首先肯定是因为我本身就是一名从业通信者,想着更加了解自己专业的知识,所以更想着从头开始了解通信的来源以及在每一个时代的发展进程。 为什么会从头开始写通信? 我最早是学习了中华上下五千年,应该说朝代史,这个算个人兴趣,从夏

X 射线测厚仪-高效精准,厚度测量的卓越之选
在现代工业的舞台上,对精准度和效率的追求从未停歇。而 X 射线测厚仪,宛如一颗璀璨的明星,以其高效精准的特质,成为厚度测量的卓越之选。 X 射线测厚仪,是科技与智慧的完美结晶。它凭借先进的 X 射线技术,如同一双透视万物的慧眼,能够轻松穿透各种材料,将厚度信息精准地呈现在人们面前。无论是坚硬的金属板材,还是柔软的塑料制品,亦或是富有弹性的橡胶制品,在它的审视下,厚度无处遁形。 高效,是它的另一

Flink全链路延迟的测量方式和实现原理
点击上方蓝色字体,选择“设为星标” 回复”面试“获取更多惊喜 本文已经加入「大数据成神之路PDF版」中提供下载。你可以关注公众号,后台回复:「PDF」 即可获取。 一、背景 Flink Job端到端延迟是一个重要的指标,用来衡量Flink任务的整体性能和响应延迟(大部分流式应用,要求低延迟特性)。 通过流处理引擎竞品对比,我们发现大部分流计算引擎产品,都在告警监控页面,集成了全链路时延指标

openlayer的测量面积公式的改进
问题来源: 首先要注意到Polygon内可能含有内部线性环,所以在计算时需要减去环的面积,同时也会有MultiPolygon的存在。所以对之前的公式进行修改。 公式代码: formatArea: function(polygon) {var wgs84Sphere = new ol.Sphere(6362790); //6378137,取该值为了跟sql对应6362789.8747i

【科普】双轴测径仪是根据哪个测量值控制外径尺寸?
单轴测径仪与双轴测径仪都是自带闭环控制功能的在线外径测量设备,单轴测径仪只有一个测头,是根据该测头的检测数据进行控制,这点毋庸置疑,那双轴测径仪这种具备两组测头的设备又是如何控制的,本文就来简单的介绍一下。 JG02-DG系列双通道测径仪内置2组固定式光电测头,可对被测物两个方向的外径尺寸进行实时测量。主要应用于BV线、通讯电缆、塑胶线、电力电缆、光纤、漆包线、铝塑管、钢材、纤维等各类管材、棒材、

基于STM32设计的ECG+PPG人体参数测量系统(华为云IOT)(217)
文章目录 一、前言1.1 项目介绍【1】开发背景【2】项目实现的功能【3】项目硬件模块组成 1.2 设计思路【1】整体设计思路【2】整体构架【3】上位机开发思路【4】ESP8266工作模式配置 1.3 项目开发背景【1】选题的意义【2】可行性分析【3】参考文献【4】摘要【5】项目背景 1.4 开发工具的选择【1】设备端开发【2】上位机开发 1.5 系统框架图1.6 系统功能总结1.7 设备原
《第一行代码》3.2View测量 笔记
1.View测量 如果我们要想绘制一个图形,首先我们要知道这个图形的大小;再是这个图形具体在什么位置;最后将图形绘制出来。 onMeasure() 如果我们想知道这个图形的大小,必须通过onMeasure()方法来发帮助我们测量View,MeasureSpec是以个32位的int值,其中高2位为测量模式,低30为测量的大小,在计算中使用位运算原因是为了提高并优化效率。
【转】用示波器测量I2C进行时序图、波形等分析
I2C的概念原理网上都有就不说了,这里只把我把两个开发板通过I2C通讯的调试经验记录分享一下。 I2C要求要有一个主设备,负责发起请求和控制时钟;其它为从设备,通过设备ID地址来识别并响应主设备请求。主从设备要轮流控制SDA。一开始我没搞明白这一点,直接加了写I2C数据代码,然后用示波器在SDA和SCL脚测量,却只能找到些凌乱的波形,没有预期的效果。后来把从设备接上,两边写好代码,互相有了响应,
使用泰克示波器DPO7254C测量LVDS时钟信号眼图
1.连接差分探头,开机,将差分探头接触到需要测量的P,N时钟上(整个测量过程手不能抖动,否则会影响测量效果)。 2.如图所示,点击Analyize。 3.点击Jitter and Eye Analyize(DPOJET)。 4.点击One Touch Jitter。 5.等待一会,就会出现眼图(Eye Diagram)。 6.点击放大第三幅图,全屏显示眼图。
GRE词汇分类之各种测量表
在这寒冷的冬日里,你依然在为备考GRE而努力吗?小编在此为各位奉上GRE词汇分类总结,希望对各位备考有帮助。 -表 calorimeter(热量计 odometer(历程标 tachometer(转速计 chronometer(精密计时表
![[ 轻知识 ] 什么是3DoF、6DoF?以及关于惯性测量单元等等](https://i-blog.csdnimg.cn/blog_migrate/10d5ccbb03ccd5bc81409eaa03916392.png)
[ 轻知识 ] 什么是3DoF、6DoF?以及关于惯性测量单元等等
本文将简单介绍运动中的“自由度”,这是讨论VR机制的必要概念。自由度(DoF)与刚体在空间内的运动相关,可以解释为“物体移动的不同基本方式”。 自由度总共有6个,可分成两种不同的类型:平移和旋转。 1. 平移运动 刚体可以在3个自由度中平移:向前/向后,向上/向下,向左/向右。 图自增强现实产业联盟 2. 旋转运动 刚体也可以在3个自由度中

双目相机实现物体尺寸的精准测量
双目视觉系统是一种模拟人类双眼的立体视觉原理,通过两个摄像头从不同的角度捕捉同一场景的图像,从而获取目标物体的三维信息。 目录 1,设备选型 2,双目相机测量的现实意义 2.1 技术优势 2.2 面对的挑战 2.3 发展趋势 3,双目相机实现上述功能 4,效果验证 1,设备选型 淘宝百元款 2,双目相机测量的现实意义 质量检测:检测产品尺寸是否符合标准,如汽

电子工程师必备:万用表测量电阻的正确方法
在电子学和电气工程领域,测量电阻是一项基本技能。无论是进行电路调试还是故障排除,了解如何使用万用表测量电阻都是至关重要的。下面就跟着道合顺来一起了解#万用表测量电阻的详细方法#指南。 一、理解电阻与万用表 什么是电阻? 电阻是导体对电流流动的阻碍作用。在欧姆定律中,电阻被定义为电压与电流的比例。公式表示为 R =V/I,其中 R表示电阻,V表示电压,I表示电流。 万用表介绍 万用

测量 Redis 服务器的固有延迟
redis-cli --intrinsic-latency redis-cli --intrinsic-latency 命令用于测量 Redis 服务器的固有延迟。 固有延迟指的是 Redis 服务器处理一个命令所需的最短时间,不包括网络延迟。通过这个测量,我们可以了解 Redis 服务器本身的性能,而不受网络延迟等外部因素的影响。 示例命令 redis-cli -h localho

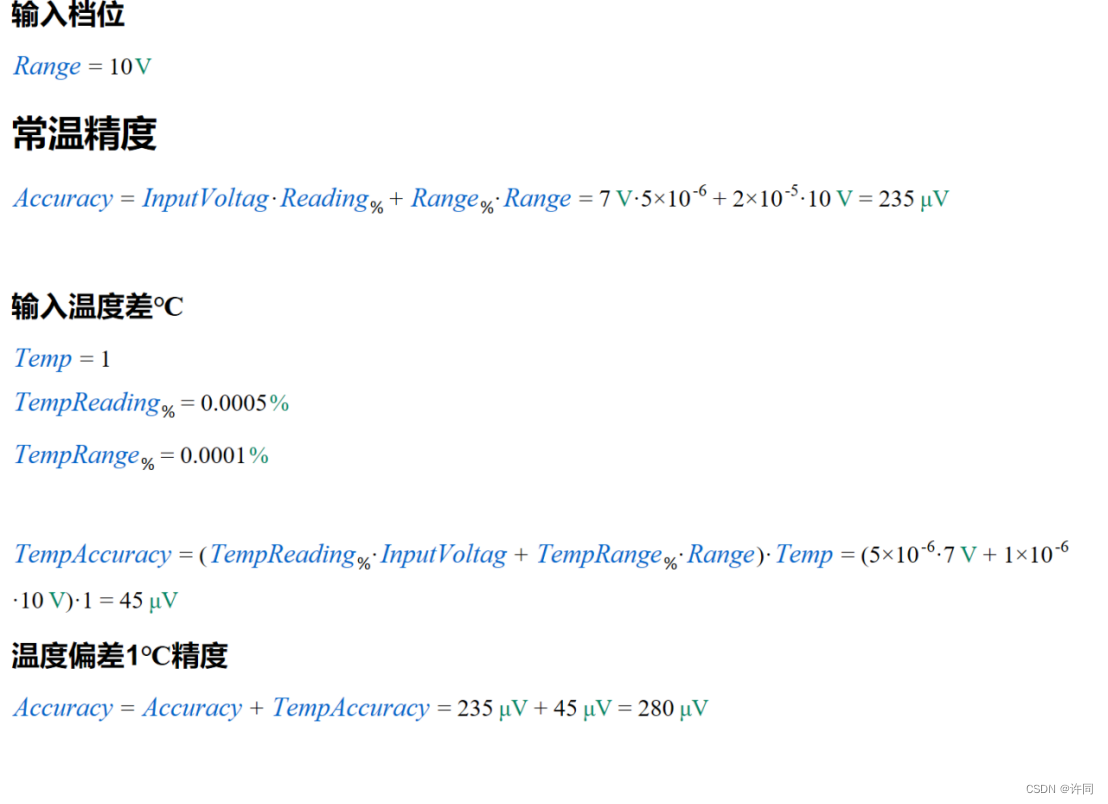
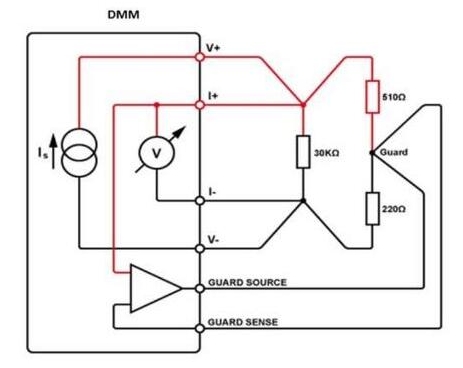
测试测量-DMM直流精度
测试测量-DMM直流精度 最近去面试,发现了自己许多不足,比如我从未考虑过万用表准或者不准,或者万用表有多准? 在过去的实验室中,常用的DMM有KEYSIGHT 34401A以及 KEITHLEY THD2015,就以这两台为例,我们去看看他们能测试的边界在哪里? 图1展示了34401A的测试精度说明,图2展示了THD2016的精度说明 图1:34401A 精度说明 图2:THD
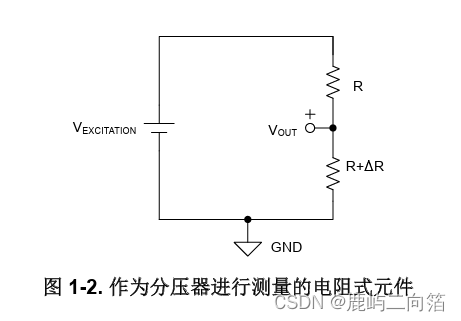
热电阻温度计的测量电路
热电阻温度计的测量电路,为达到高精度测量,通常会采用电桥测量原理,并结合适当的热电阻类型和连接方式。 惠斯通电桥是用于测量一组电阻式元件阻值变化的电路。该电路具有两个并联电阻支路,充当激励电压 VEXCITATION 的分压器。每个电阻分压器的标称输出为 VEXCITATION 除以二。在没有施加负载的情况下,元件的电 阻变化 ΔR 等于零。假设有一个理想系统,其中每个元件的标称电阻为 R,每个

轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,

【SkiaSharp绘图08】SKPaint方法:自动换行、是否乱码、字符偏移、边界、截距、文本轮廓、测量文本
文章目录 SKPaint方法BreakText 计算指定宽度内可绘制的字符个数ContainsGlyphs字体是否包含文本字符(是否会乱码)GetGlyphOffsets 字符偏移量GetGlyphPositions 偏移坐标GetGlyphWidths 每个字符的宽度与边界GetHorizontalTextIntercepts 轮廓截距GetPositionedTextIntercepts

DDMA信号处理以及数据处理的流程---距离速度测量
Hello,大家好,我是Xiaojie,好久不见,欢迎大家能够和Xiaojie一起学习毫米波雷达知识,Xiaojie准备连载一个系列的文章—DDMA信号处理以及数据处理的流程,本系列文章将从目标生成、信号仿真、测距、测速、cfar检测、测角、目标聚类、目标跟踪这几个模块逐步介绍,这个系列的文章大约是一个7-8篇左右。 最终效果如下: 整体文件的目录树如下: 本篇文章主要讲的是目标的距
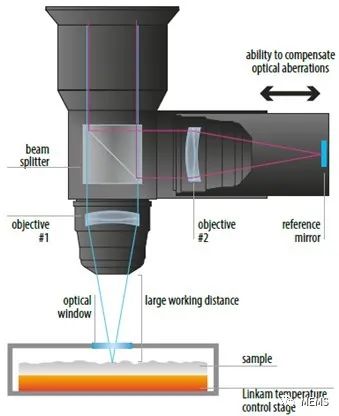
综述:光学测量技术趋势
欢迎关注:GZH《光场视觉》 光学计量学是当今制造业的关键技术之一。它通常可以被定义为用光进行测量的科学,被广泛用于评估产品(或其某些部件或组件)的物理特性,以及监测大型基础设施和设备。据麦姆斯咨询报道,近期,欧洲光电产业协会(European Photonics Industry Consortium,EPIC)的Antonio Castelo-Porta在PhotonicsViews上发表了