本文主要是介绍经典文献阅读之--LOG-LIO(高效局部几何信息估计的激光雷达惯性里程计),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
0. 简介
局部几何信息即法线和点分布在基于激光雷达的同时定位与地图构建(SLAM)中是至关重要,因为它为数据关联提供了约束,进一步确定了优化方向,最终影响姿态的准确性。然而即使在使用KD树或体素图的辅助下,估计法线和点分布也是耗时的任务。为了实现快速法线估计,《LOG-LIO: A LiDAR-Inertial Odometry with Efficient Local Geometric Information Estimation》研究了激光雷达扫描帧的结构信息,提出了一种新颖的快速近似最小二乘(FALS)方法,通过预先计算的方位角信息,当新的扫描帧到达时,估计法线仅需要点的距离信息,为了高效估计点的分布,我们将ikd树扩展到体素管理地图,并在保持法线一致性的同时增量更新其点云分布。对于满足基于法线的可见性和一致性检查的扫描点,我们设计了一种稳健且准确的分层数据关联方案,其中点到曲面的关联优先于点到平面的关联,在分布趋于收敛后,再进一步固定体素以平衡时间消耗和表示的正确性。文中的公式较多,所以我们主要先了解具体表示以及主要内容。该工作实现已在https://github.com/tiev-tongji/LOG-LIO 开源,还将Ring FALS作为独立的法线工具开源在GitHub - tiev-tongji/RingFalsNormal: A novel fast approximate least squares normal estimator using the structural information of certain LiDAR, is fast and accurate compared to PCL, and meets the real-time requirements of the LIO system.。
1. 主要贡献
地图体素内逐步更新点云分布以保持空间信息的正确性,同时与法线保持一致性。为了平衡时间消耗和表示的正确性,我们在扩展的ikd树上管理地图,并在分布收敛后进一步固定分布。本工作的主要贡献如下:
- Ring FALS一种利用特定激光雷达的结构信息的新型快速近似最小二乘法法线估计器,与PCL相比快速而准确,满足LIO系统的实时要求。
- 考虑地图体素内点分布的鲁棒且准确的分层数据关联方案,其中点到曲面的关联优先于点到平面的关联,大尺度优先于小尺度。
2. 准备性工作
2.1 符号表示

2.2 LiDAR观测模型
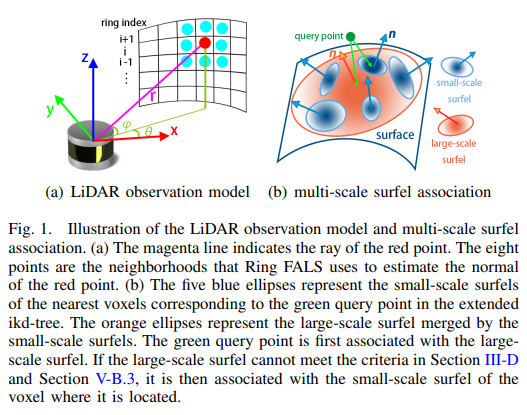
图1. LiDAR观测模型和多尺度surfel关联的示意图。(a) 紫红色线条表示红色点的射线。八个点是Ring FALS用来估计红色点法线的邻域点。(b) 五个蓝色椭圆代表最近体素对应的绿色查询点在扩展ikd-tree中的小尺度surfel。橙色椭圆代表由小尺度surfel合并而成的大尺度surfel。绿色查询点首先与大尺度surfel关联。如果大尺度surfel不能满足第2.4节和第4.2节的条件,则与其所在体素的小尺度surfel关联
在实践中,LiDAR通过结合目标表面的方位和距离测量来获取一个点的三维坐标[18],[19],如图1(a)所示。LiDAR观测模型如下:

![]()

2.3 最小二乘法法线估计

正态分布的闭式解是协方差矩阵(方程(4)中的)最小特征值所对应的特征向量。

点击经典文献阅读之--LOG-LIO(高效局部几何信息估计的激光雷达惯性里程计) - 古月居可查看全文
这篇关于经典文献阅读之--LOG-LIO(高效局部几何信息估计的激光雷达惯性里程计)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





