里程计专题

里程计运动模型及标定
最小二乘: https://blog.csdn.net/u012736279/article/details/41323247 https://blog.csdn.net/u012736279/article/details/46545971 特征提取: https://blog.csdn.net/renshengrumenglibing/article/details/860424

End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
更多优质内容,请关注公众号:智驾机器人技术前线 1.论文信息 论文标题:MBRVO: A Blur Robust Visual Odometry Based on Motion Blurred Artifact Prior 作者:Jialu Zhang, Jituo Li*, Jiaqi Li, Yue Sun, Xinqi Liu, Zhi Zheng, and Guodong Lu

《概率机器人》里程计运动模型gmapping中代码解析
里程计运动模型(odometery motion model)用距离测量代替控制。实际经验表明虽然里程计虽然仍存在误差,但通常比速度运动模型更加的精确。相比于速度运动模型运动信息 ut u_t由 (x¯t−1x¯t) \begin{pmatrix}\bar{x}_{t-1} \\ \bar{x}_t \end{pmatrix} 为了提取相对的距离, ut u_t被转变为三

LIO-SAM: 紧耦合的激光与惯导里程计方案
点云PCL免费知识星球,点云论文速读。 标题:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 作者:Tixiao Shan, Brendan Englot, Drew Meyers, Wei Wang, Carlo Ratti, and Daniela Rus 来源:分享者 欢迎各位加入免费知识

半直接法视觉里程计(SVO)实践
本文主要分两部分,编译安装SVO后对官方数据集的测试以及实验室摄像头的测试。 一.SVO安装及测试 在官方github首页上有比较详细的安装说明,不过部分步骤略有问题,此处给出成功安装的步骤。操作系统为ubuntu16.04并且安装ROS系统。 共创建两个工作空间,一个存放各种库,包括fast、g2o以及Sophus,另一个存放SVO代码。 1.安装Sophus库 按照步骤即可 cd
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,

机器人里程计(Odometry)
机器人里程计(Odometry)是机器人定位和导航中的一个关键概念,它涉及到利用传感器数据来估计机器人在环境中的位置和姿态。里程计的基本原理是根据机器人自身动作的反馈来计算其相对于初始位置的位移。这通常包括机器人从一个已知位置开始,然后使用各种类型的传感器来测量其自身的运动。 以下是一些常见的里程计类型: 1. **轮式里程计(Wheel Odometry)**: - 使用安装在机器人轮
实现ROS中两个里程计数据的转换到同一坐标系下
在多传感器融合的场景中,不同传感器可能会提供不同的位置信息。这段代码的目标是将来自两个不同来源的里程计数据转换到同一个参考坐标系(在这里,选择 odom0 的坐标系作为参考)下进行对齐,以便于后续的融合和处理。 核心步骤解析 读取和订阅里程计数据: 代码首先从ROS参数服务器读取里程计数据的订阅话题名称。然后,订阅来自两个不同来源的里程计数据,并通过回调函数来更新全局变量 o

Point-LIO:鲁棒高带宽激光惯性里程计
1. 动机 现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。 2. 主要贡献 1) 提出了一种逐
计算机视觉与深度学习 | 视觉里程计VO及惯性系统
视觉里程计VO及惯性系统 时间:2017.9.14 8:50 作者:Michael Beechan 前端视觉里程计:根据相邻图像信息估计粗略的相机运动,给后端提供初始值。 VO的实现方法(是否提取特征):特征点法和直接法。 VO的主要问题是如何根据图像来估计相机运动。 角点检测方法:SIFT,SURF,ORB等。 特征点性质:1.可重复性 2.可区别性 3.高效性 4.本地性 h

激光SLAM入门笔记(二):轮式里程计模型及标定
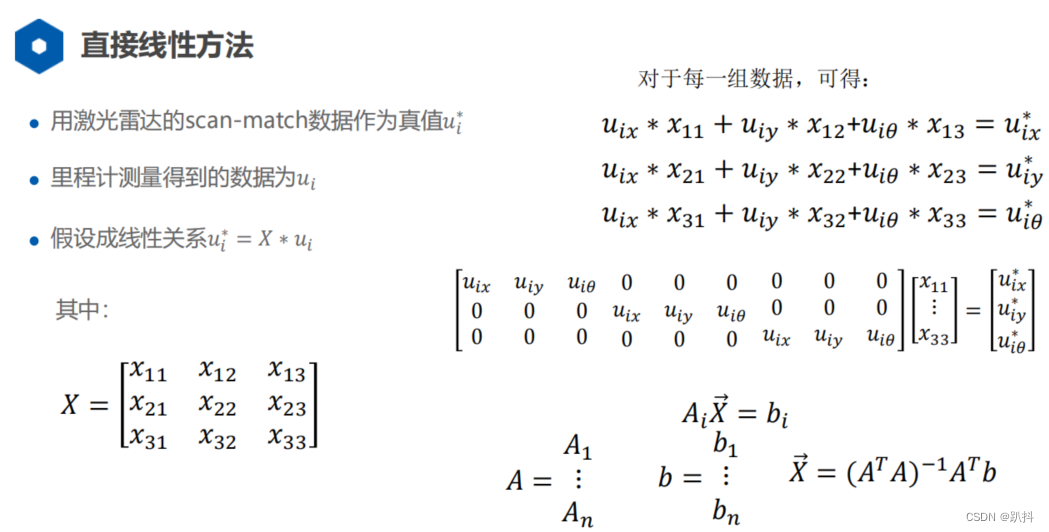
轮式里程计模型及标定 1.模型1.1 两轮差分底盘的运动学模型(以下简称运动模型)1.1.1 目的已知量未知量图 1.1.2 推导 r r r w w w v v v向量表示 1.2 航迹推算递推公式图 2.标定2.1 线性最小二乘的基本原理2.1.1 基础知识线性方程组最小二乘解 2.1.2 最小二乘求解 2.2 线性最小二乘的直线拟合直线拟合 2.3 线性最小二乘在里程计标定中的应用
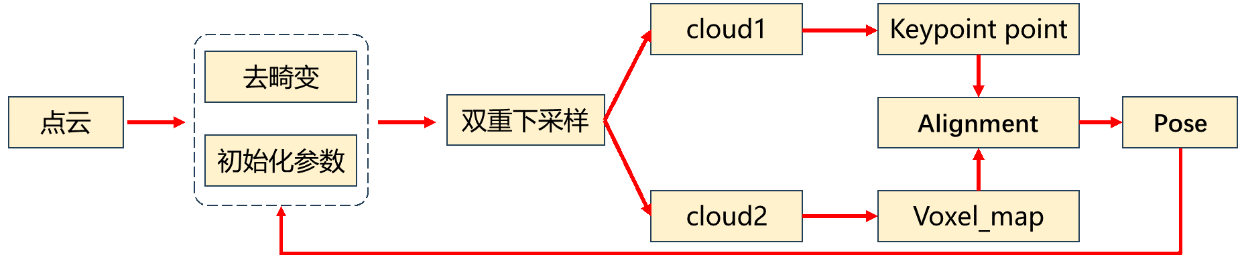
从零入门激光SLAM(十四)——简单有效的激光里程计KISS-ICP
KISS-ICP: In Defense of Point-to-Point ICP Simple, Accurate, and Robust Registration If Done the Right Way 论文地址:KISS-ICP: In Defense of Point-to-Point ICP – Simple, Accurate, and Robust Registration I

视觉SLAM学习打卡【8-2】-视觉里程计·直接法代码详解
视觉SLAM学习打卡【8-2】-视觉里程计·直接法代码详解 1. 光流法 optical_flow.cpp(1)理论推导:双线性插值(2)GFTTDetector函数介绍(3)梯度计算 2. 直接法 direct_method.cpp3. 报错解决方案(1)路径问题(2)opencv4安装 1. 光流法 optical_flow.cpp // 引入OpenCV库,它包含了计算机
经典文献阅读之--LOG-LIO(高效局部几何信息估计的激光雷达惯性里程计)
0. 简介 局部几何信息即法线和点分布在基于激光雷达的同时定位与地图构建(SLAM)中是至关重要,因为它为数据关联提供了约束,进一步确定了优化方向,最终影响姿态的准确性。然而即使在使用KD树或体素图的辅助下,估计法线和点分布也是耗时的任务。为了实现快速法线估计,《LOG-LIO: A LiDAR-Inertial Odometry with Efficient Local Geometric I
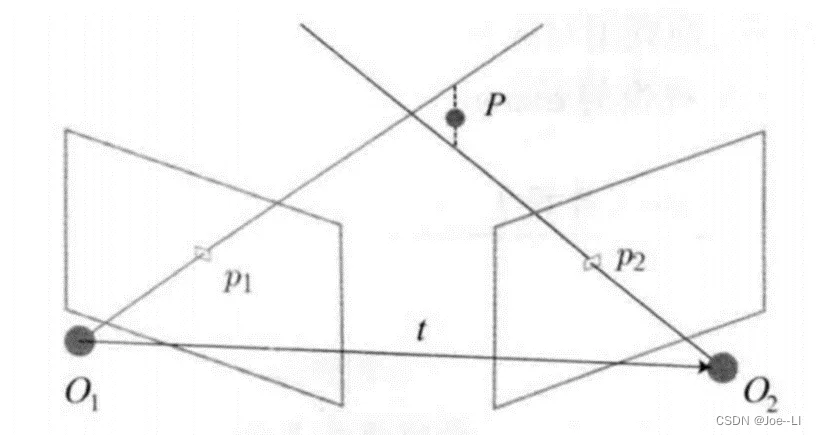
视觉里程计之对极几何
视觉里程计之对极几何 前言 上一个章节介绍了视觉里程计关于特征点的一些内容,相信大家对视觉里程计关于特征的描述已经有了一定的认识。本章节给大家介绍视觉里程计另外一个概念,对极几何。 对极几何 对极几何是立体视觉中的几何关系,描述相机从不同位置拍摄3D场景时,3D点与相机位姿,图像观测像素坐标之间的几何关系。这种几何关系可以作为约束应用到求解相机运动及特征点3D坐标中。 立体视觉(Ster

转 视觉里程计:学习笔记
博文 视觉里程计:学习笔记 已有 2027 次阅读 2011-10-13 10:17|系统分类:科研笔记|关键词:视觉 学习 separate normal style 视觉里程计 就是利用一个图像序列或者一个视频流,计算摄像机的方向和位置的过程。 10月11日 ----------------------------------------------------

机器人必备条件--里程计信息
pose:机器人当前位置坐标,包括机器人的XYZ三轴位置与方向参考,以及用于校正误差的协方差矩阵。 twist:机器人当前的运动状态,包括XYZ三轴的线速度与角速度,以及用于校正误差的协方差矩阵

从零开始激光slam定位【1】- 激光里程计
写在前面:本文是参考知乎任乾大佬的帖子完成,增加了自己的注释以及一些其他功能,如果有理解不到位的地方,请大家指正~ 目录 里程计流程front_end_node.cpp的注释可视化debug参考 里程计流程 1、如果当前帧是第一帧,那么将其看做关键帧,进行关键帧更新 2、关键帧更新都做了什么?更新local_map队列,更新local_map,更新ndt的target_c

里程计不就是输出位置的么!!!!
里程计不就是输出位置的么!!!!视觉里程计 VIO不就是干这个的么 从VO到VIO,摄像头只需要给你提供图像和IMU数据就可以了,你自己去跑VIO算法嘛,得到位置信息嘛,所以这个关键不在于摄像头啊。 视觉惯性里程计(VIO) https://zhuanlan.zhihu.com/p/114158536 你想的那些东西,别人早就考虑好了,而且有很完善
【激光SLAM】里程计运动模型及标定
目录 里程计模型两轮差分底盘的运动学模型优点差分模型 三轮全向底盘的运动学模型优点全向模型 航迹推算(Dead Reckoning) 里程计标定线性最小二乘的基本原理最小二乘的直线拟合最小二乘在里程计标定中的应用方法 里程计模型 里程计相关介绍 两轮差分底盘的运动学模型 优点 结构简单,越障性能好便宜,应该是所有底盘构型中最便宜的类型,只需要两个电机模型简单 差分模型
激光雷达(LIDAR)和里程计数据的时间同步方法汇总
文章目录 激光雷达(LIDAR)和里程计数据的时间同步常用方法的汇总如何使用双缓冲队列来同步激光雷达和里程计数据如何使用插值同步来同步激光雷达和里程计数据代码详细解读1. 数据结构定义2. 线性插值函数3. 数据同步函数 激光雷达(LIDAR)和里程计数据的时间同步常用方法的汇总 激光雷达(LIDAR)和里程计数据的时间同步,可以采用多种方法,每种方法都有其适用场景和优势。以
《LIO-SAM阅读笔记》-为何要引入增量式里程计?
前言: LIO-SAM在后端中同时维护着两个里程计,一个是增量式里程计,一个是优化后的里程计,其中优化后的里程计是经过imu、回环、gps因子图联合优化后的结果,是整个系统中最准确的位姿估计,那么为什么还需要维护增量式里程计呢? 以下是我的理解,不一定正确,如有错误,或者不一样的见解欢迎在评论区留言讨论。 我认为最主要的原因(或者是最大的用途)是需要用增量式里程计信息结合imu预积分信息
自带SLAM和定位,不需要里程计的全新建图传感器—— SLAMTEC Mapper来了
这些年,我们引领并见证了激光传感器行业的快速发展,是时候,我们来搞点新的名堂了! 下面,有请今天的主角SLAMTEC Mapper 正式登场! Slamtec Mapper,小名:建图雷达,一个集实时地图构建和定位为一体的全新激光传感器品类,在TOF雷达的基础上,我们加入了思岚引以为傲的第三代高性能SLAM建图定位系统。可以直接对外输出高品质的地图以及定位坐标信息,从此再也不要在使用激光雷

自学SLAM(9)《第五讲:特征点法视觉里程计》作业
文章目录 1.ORB特征点1.1 ORB提取1.2 ORB描述1.3 暴力匹配1.4 最后,请结合实验,回答下⾯⼏个问题 2.从 E 恢复 R,t3.用 G-N 实现 Bundle Adjustment4.* 用 ICP 实现轨迹对齐 1.ORB特征点 1.1 ORB提取 ORB(Oriented FAST and BRIEF) 特征是 SLAM 中⼀种很常⽤的特征,
SLAM | 视觉SLAM中的前端:视觉里程计与回环检测
点击上方“AI算法修炼营”,选择加星标或“置顶” 标题以下,全是干货 什么是SLAM? 同时定位与地图构建 (simultaneous localization and mapping, SLAM)是机器人进入未知环境遇到的第一个问题。它是指机器人搭载特定传感器,在没有环境先验信息的情况下,于运动过程中对周围环境建模并同时估计自身的位姿。如果传感器主要为相机,那么就称为视觉 SLAM(VSLAM

realsense-ros里里程计相关代码
最开始是看到t265_realsense_node.h 后面备注轮式里程计,我很好奇这个是不是就是用来直接输出位置信息的?然后我找到了它对应的cpp文件,里面确实是有轮式里程计相关, https://github.com/IntelRealSense/realsense-ros/tree/development/realsense2_camera/include http