本文主要是介绍视觉SLAM学习打卡【8-2】-视觉里程计·直接法代码详解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
视觉SLAM学习打卡【8-2】-视觉里程计·直接法代码详解
- 1. 光流法 optical_flow.cpp
- (1)理论推导:双线性插值
- (2)GFTTDetector函数介绍
- (3)梯度计算
- 2. 直接法 direct_method.cpp
- 3. 报错解决方案
- (1)路径问题
- (2)opencv4安装
1. 光流法 optical_flow.cpp
// 引入OpenCV库,它包含了计算机视觉任务所需的各种函数和数据结构
#include <opencv2/opencv.hpp> // 引入C++标准库中的string,用于处理字符串,如文件路径
#include <string> // 引入C++标准库中的chrono,通常用于计时和性能评估
#include <chrono> // 引入Eigen库的核心和密集矩阵模块,Eigen是一个高级C++库,用于进行线性代数、矩阵和向量操作
#include <Eigen/Core>
#include <Eigen/Dense> // 使用C++标准库的命名空间,以便更方便地访问其函数和对象
using namespace std; // 使用OpenCV的命名空间,以便更方便地访问其函数和对象
using namespace cv; // 定义两个字符串变量,分别存储两个图像文件的路径
string file_1 = "./LK1.png"; // 第一个图像文件路径
string file_2 = "./LK2.png"; // 第二个图像文件路径 // 定义一个名为OpticalFlowTracker的类,用于光流跟踪和相关接口
class OpticalFlowTracker {
public: // 构造函数,初始化类的成员变量,并接收一系列参数,包括两张图像、关键点集合、成功跟踪的标志等 OpticalFlowTracker( const Mat &img1_, // 第一张图像 const Mat &img2_, // 第二张图像 const vector<KeyPoint> &kp1_, // 在第一张图像中检测到的关键点 vector<KeyPoint> &kp2_, // 在第二张图像中对应的关键点(输出参数) vector<bool> &success_, // 跟踪成功的标志(输出参数) bool inverse_ = true, // 是否使用逆向光流法,默认为true bool has_initial_ = false // 是否已有初始猜测,默认为false ) : img1(img1_), img2(img2_), kp1(kp1_), kp2(kp2_), success(success_), inverse(inverse_), has_initial(has_initial_) {} // 初始化列表,为成员变量赋值 // 成员函数,计算给定范围内的光流 void calculateOpticalFlow(const Range &range); private: // 类的私有成员变量,包括两张图像、关键点集合、跟踪成功的标志等 const Mat &img1; // 第一张图像 const Mat &img2; // 第二张图像 const vector<KeyPoint> &kp1; // 在第一张图像中检测到的关键点 vector<KeyPoint> &kp2; // 在第二张图像中对应的关键点 vector<bool> &success; // 跟踪成功的标志 bool inverse = true; // 是否使用逆向光流法 bool has_initial = false; // 是否已有初始猜测
}; /** * 单层光流法函数声明,用于计算两张图像之间的光流 * @param [in] img1 第一张图像 * @param [in] img2 第二张图像 * @param [in] kp1 在第一张图像中检测到的关键点 * @param [in|out] kp2 在第二张图像中对应的关键点,如果为空,则使用kp1中的初始猜测 * @param [out] success 跟踪成功的标志 * @param [in] inverse 是否使用逆向光流法,默认为false * @param [in] has_initial_guess 是否已有初始猜测,默认为false */
void OpticalFlowSingleLevel( const Mat &img1, // 第一张图像 const Mat &img2, // 第二张图像 const vector<KeyPoint> &kp1, // 在第一张图像中检测到的关键点 vector<KeyPoint> &kp2, // 在第二张图像中对应的关键点(可能是输出参数) vector<bool> &success, // 跟踪成功的标志(输出参数) bool inverse = false, // 是否使用逆向光流法,默认为false bool has_initial_guess = false // 是否已有初始猜测,默认为false
); /** * 多层光流法函数声明,用于计算两张图像之间的光流,使用图像金字塔来提高精度和稳定性 * @param [in] img1 第一张图像金字塔 * @param [in] img2 第二张图像金字塔 * @param [in] kp1 在第一张图像中检测到的关键点 * @param [out] kp2 在第二张图像中对应的关键点 * @param [out] success 跟踪成功的标志 * @param [in] inverse 是否启用逆向光流法来提高精度和稳定性,特别是在快速运动时 */
// 函数声明:多层光流法,用于在两张图像之间计算关键点的光流
void OpticalFlowMultiLevel( const Mat &img1, // 第一张图像 const Mat &img2, // 第二张图像 const vector<KeyPoint> &kp1, // 第一张图像中的关键点 vector<KeyPoint> &kp2, // 第二张图像中对应的关键点(输出参数) vector<bool> &success, // 跟踪成功的标志(输出参数) bool inverse = false // 是否使用逆向光流法,默认为false
); /** * 从参考图像中获取灰度值(双线性插值) * @param img 输入图像 * @param x 浮点型x坐标 * @param y 浮点型y坐标 * @return 插值后的像素值 */ // 定义一个内联函数,用于通过双线性插值从图像中获取灰度值
inline float GetPixelValue(const cv::Mat &img, float x, float y) { // 边界检查,确保坐标在图像范围内 if (x < 0) x = 0; if (y < 0) y = 0; if (x >= img.cols - 1) x = img.cols - 2; if (y >= img.rows - 1) y = img.rows - 2; // 计算插值所需的权重 float xx = x - floor(x); float yy = y - floor(y); int x_a1 = std::min(img.cols - 1, int(x) + 1); // 确保x坐标不超出图像边界 int y_a1 = std::min(img.rows - 1, int(y) + 1); // 确保y坐标不超出图像边界 // 进行双线性插值计算 return (1 - xx) * (1 - yy) * img.at<uchar>(y, x) + // 左下角像素的权重和值 xx * (1 - yy) * img.at<uchar>(y, x_a1) + // 右下角像素的权重和值 (1 - xx) * yy * img.at<uchar>(y_a1, x) + // 左上角像素的权重和值 xx * yy * img.at<uchar>(y_a1, x_a1); // 右上角像素的权重和值
} // 主函数
int main(int argc, char **argv) { // 读取两张图像,注意它们是灰度图像(CV_8UC1),不是彩色图像(CV_8UC3) Mat img1 = imread(file_1, 0); // 读取第一张图像为灰度图 Mat img2 = imread(file_2, 0); // 读取第二张图像为灰度图 // 检测关键点,这里使用GFTT(Good Features To Track)方法 vector<KeyPoint> kp1; // 存储第一张图像中的关键点 Ptr<GFTTDetector> detector = GFTTDetector::create(500, 0.01, 20); // 最多检测500个关键点,其他参数为算法设置 detector->detect(img1, kp1); // 在第一张图像中检测关键点 // 接下来在第二张图像中跟踪这些关键点 // 首先使用单层LK光流法进行测试 vector<KeyPoint> kp2_single; // 存储单层LK光流法跟踪到的关键点 vector<bool> success_single; // 存储单层LK光流法跟踪成功的标志 OpticalFlowSingleLevel(img1, img2, kp1, kp2_single, success_single); // 执行单层LK光流法 // 然后测试多层LK光流法 vector<KeyPoint> kp2_multi; // 存储多层LK光流法跟踪到的关键点 vector<bool> success_multi; // 存储多层LK光流法跟踪成功的标志 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); // 记录开始时间 OpticalFlowMultiLevel(img1, img2, kp1, kp2_multi, success_multi, true); // 执行多层LK光流法,启用逆向光流 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); // 记录结束时间 auto time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); // 计算执行时间 cout << "optical flow by gauss-newton: " << time_used.count() << endl; // 输出执行时间 // 使用OpenCV的calcOpticalFlowPyrLK函数进行验证 vector<Point2f> pt1, pt2; // 存储输入和输出的关键点位置 for (auto &kp: kp1) pt1.push_back(kp.pt); // 将关键点位置转换为OpenCV的点格式 vector<uchar> status; // 存储每个关键点的跟踪状态 vector<float> error; // 存储每个关键点的跟踪误差 t1 = chrono::steady_clock::now(); // 记录开始时间 cv::calcOpticalFlowPyrLK(img1, img2, pt1, pt2, status, error); // 执行OpenCV的光流法函数 t2 = chrono::steady_clock::now(); // 记录结束时间 time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); // 计算执行时间 cout << "optical flow by opencv: " << time_used.count() << endl; // 输出执行时间
}
// 转换img2图像从灰度到BGR颜色空间,以便在彩色图像上绘制
Mat img2_single;
cv::cvtColor(img2, img2_single, CV_GRAY2BGR); // 遍历关键点kp2_single,这些关键点可能是在单尺度上检测到的特征点
for (int i = 0; i < kp2_single.size(); i++) { // 如果当前关键点匹配成功(由success_single数组标记) if (success_single[i]) { // 在匹配的关键点位置上画一个绿色的圆圈,表示匹配成功的位置 cv::circle(img2_single, kp2_single[i].pt, 2, cv::Scalar(0, 250, 0), 2); // 画一条从kp1[i]到kp2_single[i]的线,表示两个图像之间的关键点匹配 cv::line(img2_single, kp1[i].pt, kp2_single[i].pt, cv::Scalar(0, 250, 0)); }
} // 与上面的操作类似,但是这次是针对多尺度检测到的关键点
Mat img2_multi;
cv::cvtColor(img2, img2_multi, CV_GRAY2BGR);
for (int i = 0; i < kp2_multi.size(); i++) { if (success_multi[i]) { cv::circle(img2_multi, kp2_multi[i].pt, 2, cv::Scalar(0, 250, 0), 2); cv::line(img2_multi, kp1[i].pt, kp2_multi[i].pt, cv::Scalar(0, 250, 0)); }
} // 这里的操作与上面类似,但是使用的是OpenCV函数找到的匹配点
Mat img2_CV;
cv::cvtColor(img2, img2_CV, CV_GRAY2BGR);
for (int i = 0; i < pt2.size(); i++) { if (status[i]) { // status数组表示每个点的匹配状态 cv::circle(img2_CV, pt2[i], 2, cv::Scalar(0, 250, 0), 2); cv::line(img2_CV, pt1[i], pt2[i], cv::Scalar(0, 250, 0)); }
} // 显示三个处理后的图像窗口
cv::imshow("tracked single level", img2_single); // 显示单尺度跟踪结果
cv::imshow("tracked multi level", img2_multi); // 显示多尺度跟踪结果
cv::imshow("tracked by opencv", img2_CV); // 显示OpenCV跟踪结果 // 等待用户按键,然后继续执行后续代码(如果有的话)或退出程序
cv::waitKey(0); return 0; // 程序正常退出,返回0
// OpticalFlowSingleLevel函数用于计算两个图像之间的光流
void OpticalFlowSingleLevel( const Mat &img1, // 第一个图像 const Mat &img2, // 第二个图像 const vector<KeyPoint> &kp1, // 第一个图像中的关键点 vector<KeyPoint> &kp2, // 第二个图像中匹配的关键点,将会被计算和填充 vector<bool> &success, // 标记每个关键点是否成功匹配 bool inverse, // 是否使用逆向光流法 bool has_initial) { // 是否有初始估计值 kp2.resize(kp1.size()); // 调整kp2的大小以匹配kp1的大小 success.resize(kp1.size()); // 调整success的大小以匹配kp1的大小 // 创建一个OpticalFlowTracker对象来处理光流计算 OpticalFlowTracker tracker(img1, img2, kp1, kp2, success, inverse, has_initial); // 使用并行计算来加速光流计算过程 parallel_for_(Range(0, kp1.size()), std::bind(&OpticalFlowTracker::calculateOpticalFlow, &tracker, placeholders::_1));
} // OpticalFlowTracker类的成员函数,用于计算指定范围内的光流
void OpticalFlowTracker::calculateOpticalFlow(const Range &range) { int half_patch_size = 4; // 补丁的一半大小,用于定义关键点周围的区域 int iterations = 10; // Gauss-Newton迭代的次数 // 遍历指定范围内的所有关键点 for (size_t i = range.start; i < range.end; i++) { auto kp = kp1[i]; // 获取当前关键点 double dx = 0, dy = 0; // 初始化光流的x和y分量 // 如果有初始估计,则从kp2中获取dx和dy的初始值 if (has_initial) { dx = kp2[i].pt.x - kp.pt.x; dy = kp2[i].pt.y - kp.pt.y; } double cost = 0, lastCost = 0; // 初始化代价和上一次迭代的代价 bool succ = true; // 标记当前关键点是否成功匹配 // 使用Gauss-Newton方法进行迭代优化 Eigen::Matrix2d H = Eigen::Matrix2d::Zero(); // 初始化Hessian矩阵 Eigen::Vector2d b = Eigen::Vector2d::Zero(); // 初始化bias向量 Eigen::Vector2d J; // 初始化Jacobian向量 // 进行迭代优化 for (int iter = 0; iter < iterations; iter++) { // 根据是否是逆向模式来重置H和b if (!inverse) { H = Eigen::Matrix2d::Zero(); b = Eigen::Vector2d::Zero(); } else { b = Eigen::Vector2d::Zero(); } cost = 0; // 重置代价 // 在关键点周围的区域内计算代价和Jacobian for (int x = -half_patch_size; x < half_patch_size; x++) { for (int y = -half_patch_size; y < half_patch_size; y++) { // 计算两个图像在对应位置的像素值差(即误差) double error = GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y) - GetPixelValue(img2, kp.pt.x + x + dx, kp.pt.y + y + dy); // 根据是否是逆向模式来计算Jacobian if (!inverse) { // ...(省略了梯度J的计算过程) } else if (iter == 0) { // ...(省略了梯度J的计算过程) } // 更新b, H和代价 b += -error * J; cost += error * error; if (!inverse || iter == 0) { H += J * J.transpose(); } } } // 使用LDLT分解来求解更新量 Eigen::Vector2d update = H.ldlt().solve(b); // 检查更新量是否有效 if (std::isnan(update[0])) { // 如果更新量是NaN,则表示失败 cout << "update is nan" << endl; succ = false; break; } // 检查代价是否降低,如果没有则退出循环 if (iter > 0 && cost > lastCost) { break; } // 更新dx, dy和上一次迭代的代价 dx += update[0]; dy += update[1]; lastCost = cost; succ = true; // 检查是否收敛,如果更新量很小则退出循环 if (update.norm() < 1e-2) { break; } } // 设置成功匹配的标记和第二个图像中的关键点位置 success[i] = succ; kp2[i].pt = kp.pt + Point2f(dx, dy); }
}
// 定义一个多层光流法跟踪函数
void OpticalFlowMultiLevel( const Mat &img1, // 第一个图像 const Mat &img2, // 第二个图像 const vector<KeyPoint> &kp1, // 第一个图像中的关键点 vector<KeyPoint> &kp2, // 第二个图像中对应的关键点,为输出参数 vector<bool> &success, // 跟踪是否成功的标志位,为输出参数 bool inverse // 是否反向跟踪(从第二帧跟踪到第一帧)
) { // 设定金字塔的层数和每层之间的缩放比例 int pyramids = 4; double pyramid_scale = 0.5; double scales[] = {1.0, 0.5, 0.25, 0.125}; // 各层金字塔的缩放比例 // 开始计时,用于计算构建金字塔所用的时间 chrono::steady_clock::time_point t1 = chrono::steady_clock::now(); vector<Mat> pyr1, pyr2; // 定义两个图像金字塔 // 构建图像金字塔 for (int i = 0; i < pyramids; i++) { if (i == 0) { pyr1.push_back(img1); // 第一层为原图 pyr2.push_back(img2); } else { Mat img1_pyr, img2_pyr; // 对上一层的图像进行缩放,得到当前层的图像 cv::resize(pyr1[i - 1], img1_pyr, cv::Size(pyr1[i - 1].cols * pyramid_scale, pyr1[i - 1].rows * pyramid_scale)); cv::resize(pyr2[i - 1], img2_pyr, cv::Size(pyr2[i - 1].cols * pyramid_scale, pyr2[i - 1].rows * pyramid_scale)); pyr1.push_back(img1_pyr); // 将当前层的图像添加到金字塔中 pyr2.push_back(img2_pyr); } } // 结束计时,并输出构建金字塔所用的时间 chrono::steady_clock::time_point t2 = chrono::steady_clock::now(); auto time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "build pyramid time: " << time_used.count() << endl; // 将原图中的关键点按照最底层的缩放比例进行缩放,以便在金字塔的最顶层进行跟踪 vector<KeyPoint> kp1_pyr, kp2_pyr; for (auto &kp:kp1) { auto kp_top = kp; kp_top.pt *= scales[pyramids - 1]; // 按照最底层的缩放比例进行缩放 kp1_pyr.push_back(kp_top); // 添加到关键点金字塔中 kp2_pyr.push_back(kp_top); } // 从金字塔的顶层开始,向下逐层进行跟踪 for (int level = pyramids - 1; level >= 0; level--) { success.clear(); // 清空上一层的跟踪成功标志位 t1 = chrono::steady_clock::now(); // 开始计时 // 在当前层进行光流法跟踪 OpticalFlowSingleLevel(pyr1[level], pyr2[level], kp1_pyr, kp2_pyr, success, inverse, true); t2 = chrono::steady_clock::now(); // 结束计时 // 输出当前层的跟踪时间 auto time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "track pyr " << level << " cost time: " << time_used.count() << endl; // 如果不是最底层,则将关键点的位置按照缩放比例进行放大,以便在下一层进行跟踪 if (level > 0) { for (auto &kp: kp1_pyr) kp.pt /= pyramid_scale; for (auto &kp: kp2_pyr) kp.pt /= pyramid_scale; } } // 将最终跟踪到的关键点添加到输出参数中 for (auto &kp: kp2_pyr) kp2.push_back(kp);
}
注:上述路径需改为绝对路径.
(1)理论推导:双线性插值
首先,来看单线性插值(双线性插值可看作3次双线性插值)
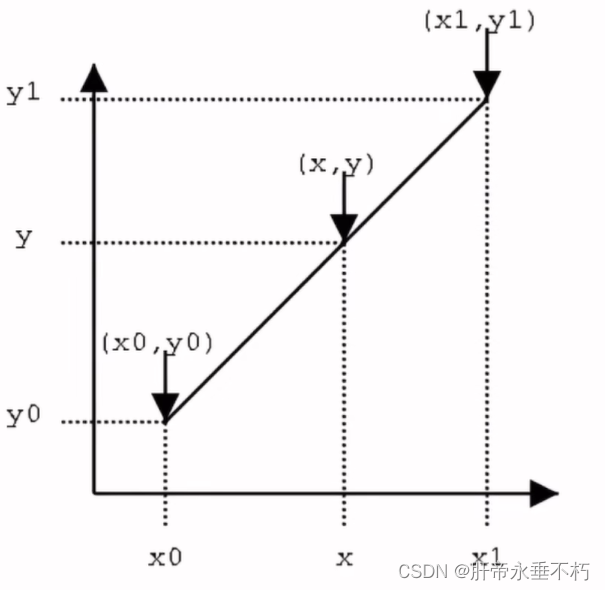
由斜率相等可得 y − y 0 x − x 0 = y 1 − y 0 x 1 − x 0 \frac{y-y_{0}}{x-x_{0}}=\frac{y_{1}-y_{0}}{x_{1}-x_{0}} x−x0y−y0=x1−x0y1−y0化简得 y = x 1 − x x 1 − x 0 y 0 + x − x 0 x 1 − x 0 y 1 y=\frac{x_{1}-x}{x_{1}-x_{0}}y_{0}+\frac{x_{-}x_{0}}{x_{1}-x_{0}}y_{1} y=x1−x0x1−xy0+x1−x0x−x0y1把y看作函数值P P = x 1 − x x 1 − x 0 P 0 + x − x 0 x 1 − x 0 P 1 . P=\frac{x_{1}-x}{x_{1}-x_{0}}P_{0}+\frac{x-x_{0}}{x_{1}-x_{0}}P_{1}. P=x1−x0x1−xP0+x1−x0x−x0P1.
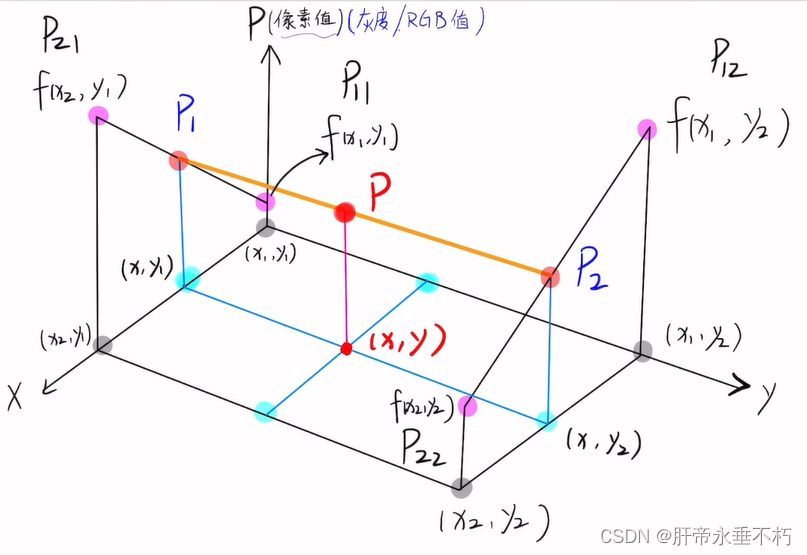
以左梯形面作x方向上的线性插值,即
P 1 = x 2 − x x 2 − x 1 P 11 + x − x 1 x 2 − x 1 P 21 P_{1}=\frac{x_{2}-x}{x_{2}-x_{1}} P_{11} +\frac{x-x_{1}}{x_{2}-x_{1}} P_{21} P1=x2−x1x2−xP11+x2−x1x−x1P21
以右梯形面作x方向上的线性插值,即

P 2 = x 2 − x x 2 − x 1 P 12 + x − x 1 x 2 − x 1 P 22 P_{2}=\frac{x_{2}-x}{x_{2}-x_{1}}P_{12}+\frac{x-x_{1}}{x_{2}-x_{1}}P_{22} P2=x2−x1x2−xP12+x2−x1x−x1P22以中间梯形面作y方向上的线性插值,即
P = y 2 − y y 2 − y 1 P 1 + y − y 1 y 2 − y 1 p 2 P=\frac{y_{2}-y}{y_{2}-y_{1}} P_{1}+\frac{y-y_{1}}{y_{2}-y_{1}} p_{2} P=y2−y1y2−yP1+y2−y1y−y1p2将P1、P2代入上式得 P = P 11 ( x 2 − x 1 ) ( y 2 − y 1 ) ( x 2 − x 1 ) ( y 2 − y ) + P 21 ( x 2 − x 1 ) ( y 2 − y 1 ) ( x − x 1 ) ( y 2 − y ) + P 12 ( x 2 − x 1 ) ( y 2 − y 1 ) ( x 2 − x 1 ) ( y − y 1 ) + P 22 ( x 2 − x 1 ) ( y 2 − y 1 ) ( x − x 1 ) ( y − y 1 ) \begin{gathered} P=\frac{P_{11}}{(x_{2}-x_{1})(y_{2}-y_{1})}(x_{2}-x_{1})(y_{2}-y)+\frac{P_{21}}{(x_{2}-x_{1})(y_{2}-y_{1})}(x-x_{1})(y_{2}-y)+ \\ \frac{P_{12}}{(x_{2}-x_{1})(y_{2}-y_{1})}(x_{2}-x_{1})(y-y_{1})+\frac{P_{22}}{(x_{2}-x_{1})(y_{2}-y_{1})}(x-x_{1})(y-y_{1}) \\\end{gathered} P=(x2−x1)(y2−y1)P11(x2−x1)(y2−y)+(x2−x1)(y2−y1)P21(x−x1)(y2−y)+(x2−x1)(y2−y1)P12(x2−x1)(y−y1)+(x2−x1)(y2−y1)P22(x−x1)(y−y1)由于相邻四个点x,y只差1,即
所以,上式化简为 P = P 11 ( x 2 − x ) ( y 2 − y ) + P 21 ( x − x 1 ) ( y 2 − y ) + P 12 ( x 2 − x ) ( y − y 1 ) + P 22 ( x − x 1 ) ( y − y 1 ) \begin{aligned}P&=P_{11}(x_2-x)(y_2-y)+P_{21}(x-x_1)(y_2-y)\\&+P_{12}(x_2-x)(y-y_1)+P_{22}(x-x_1)(y-y_1)\end{aligned} P=P11(x2−x)(y2−y)+P21(x−x1)(y2−y)+P12(x2−x)(y−y1)+P22(x−x1)(y−y1)【直通车】——附:参考自视频-图像处理·双线性插值
(2)GFTTDetector函数介绍
Ptr<GFTTDetector> detector = GFTTDetector::create(500, 0.01, 20);
这行代码是在使用OpenCV库创建一个GFTT(Good Features to Track)检测器对象。GFTT是一个计算机视觉中用于特征点检测的方法,常用于目标跟踪、图像拼接等应用中。
Ptr detector:这里定义了一个指向GFTTDetector类的智能指针detector。Ptr是OpenCV中的一个模板类,用于自动管理对象的生命周期,类似于C++11中的std::shared_ptr。当Ptr对象超出其作用域或被重置时,它会自动删除其所指向的对象。
GFTTDetector::create(500, 0.01, 20):这是调用GFTTDetector类的静态成员函数create来创建一个GFTTDetector实例。这个函数接受三个参数:
- 500:这是要检测的最大特征点数量。在这个例子中,检测器将尝试找到最多500个特征点。
- 0.01:这是特征点检测的质量等级,值范围通常在0到1之间(或表示为百分比)。这个值越高,检测到的特征点就越少,但每个特征点的“质量”或“独特性”通常也越高。这里的0.01是一个相对较低的值,意味着检测器会尝试找到相对较多的特征点,尽管它们可能不是最独特或最显著的。
- 20:这是两个特征点之间的最小距离。这有助于确保检测到的特征点在图像中分布均匀,而不是都集中在图像的某个特定区域。
总的来说,这行代码创建了一个GFTTDetector对象,该对象被配置为在图像中查找最多500个特征点,这些特征点的质量至少为0.01,并且特征点之间的最小距离为20个像素单位。这个检测器之后可以用于在图像中查找符合这些条件的特征点。
(3)梯度计算
J = -1.0 * Eigen::Vector2d(0.5 * (GetPixelValue(img1, kp.pt.x + x + 1, kp.pt.y + y) -GetPixelValue(img1, kp.pt.x + x - 1, kp.pt.y + y)),0.5 * (GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y + 1) -GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y - 1))
这段代码是在计算图像中某个关键点(kp)附近像素的强度梯度。具体地说,它是在一个二维图像(img1)中,对于给定的关键点位置(kp.pt.x, kp.pt.y),计算该点在水平和垂直方向上的强度梯度。这里的x和y可能是相对于关键点位置的某个偏移量,用于在关键点周围的某个具体位置计算梯度。
水平梯度计算:
- GetPixelValue(img1, kp.pt.x + x + 1, kp.pt.y + y) 获取关键点右侧紧邻像素的值。
- GetPixelValue(img1, kp.pt.x + x - 1, kp.pt.y + y) 获取关键点左侧紧邻像素的值。
- 两者之差的一半表示该点在水平方向上的梯度(或称为x方向上的导数近似值)。
垂直梯度计算:
- GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y + 1) 获取关键点下侧紧邻像素的值。
- GetPixelValue(img1, kp.pt.x + x, kp.pt.y + y - 1) 获取关键点上侧紧邻像素的值。
- 两者之差的一半表示该点在垂直方向上的梯度(或称为y方向上的导数近似值)。
最后,这两个梯度值被组合成一个Eigen::Vector2d类型的向量J,其中J[0]是水平梯度,J[1]是垂直梯度。
这种梯度计算在计算机视觉中非常常见,特别是在特征检测、光流估计、图像配准等任务中。梯度提供了关于图像局部强度和方向变化的重要信息。在这个例子中,负号可能是为了将梯度方向与强度增加的方向对应起来(这取决于具体的梯度定义和后续应用)。不过,在很多情况下,梯度的具体方向并不是关键,而是其大小和方向的变化更为重要。
2. 直接法 direct_method.cpp
// 引入OpenCV库,一个开源的计算机视觉和机器学习库
#include <opencv2/opencv.hpp>
// 引入Sophus库,一个用于处理3D变换(如旋转和平移)的C++库
#include <sophus/se3.hpp>
// 引入Boost库中的format模块,用于字符串格式化
#include <boost/format.hpp>
//一个用于视觉SLAM的轻量级GUI库
#include <pangolin/pangolin.h> // 注意:这里可能是拼写错误,应该是Pangolin而不是Pangolin // 使用C++标准库的命名空间
using namespace std; // 定义一个使用Eigen对齐分配器的vector,用于存储2D向量
typedef vector<Eigen::Vector2d, Eigen::aligned_allocator<Eigen::Vector2d>> VecVector2d; // 相机内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 双目相机的基线长度
double baseline = 0.573;
// 图像文件的路径
string left_file = "./left.png";
string disparity_file = "./disparity.png";
// 用于格式化文件名的boost::format对象
boost::format fmt_others("./%06d.png"); // 其他文件 // 定义一些方便的别名
typedef Eigen::Matrix<double, 6, 6> Matrix6d; // 6x6的双精度矩阵
typedef Eigen::Matrix<double, 2, 6> Matrix26d; // 2x6的双精度矩阵
typedef Eigen::Matrix<double, 6, 1> Vector6d; // 6x1的双精度向量 /// 用于并行计算中累积雅可比矩阵的类
class JacobianAccumulator {
public: // 构造函数,初始化类的成员变量 JacobianAccumulator( const cv::Mat &img1_, // 第一张图像 const cv::Mat &img2_, // 第二张图像 const VecVector2d &px_ref_, // 参考像素坐标 const vector<double> depth_ref_, // 参考像素对应的深度值 Sophus::SE3d &T21_) // 从第一个相机到第二个相机的变换矩阵 : img1(img1_), img2(img2_), px_ref(px_ref_), depth_ref(depth_ref_), T21(T21_) { // 初始化投影点的vector,大小和px_ref相同,初始值为(0, 0) projection = VecVector2d(px_ref.size(), Eigen::Vector2d(0, 0)); } // 在给定的范围内累积雅可比矩阵 void accumulate_jacobian(const cv::Range &range); // 获取海森矩阵 Matrix6d hessian() const { return H; } // 获取偏差向量 Vector6d bias() const { return b; } // 获取总代价 double cost_func() const { return cost; } // 获取投影点 VecVector2d projected_points() const { return projection; } // 重置H, b, cost为0 void reset() { H = Matrix6d::Zero(); // 将H初始化为6x6的零矩阵 b = Vector6d::Zero(); // 将b初始化为6x1的零向量 cost = 0; // 将代价重置为0 } private: // 成员变量:两张图像、参考像素坐标、参考深度值、相机间的变换矩阵、投影点等 const cv::Mat &img1; const cv::Mat &img2; const VecVector2d &px_ref; const vector<double> depth_ref; Sophus::SE3d &T21; VecVector2d projection; // 投影点 // 用于保护海森矩阵H的互斥锁(在多线程环境中防止数据竞争) std::mutex hessian_mutex; Matrix6d H = Matrix6d::Zero(); // 初始化为6x6的零矩阵,用于存储海森矩阵 Vector6d b = Vector6d::Zero(); // 初始化为6x1的零向量,用于存储偏差向量 double cost = 0; // 代价函数的值,初始化为0
};
/** * 使用直接法进行位姿估计 * @param img1 第一个图像 * @param img2 第二个图像 * @param px_ref 参考像素坐标 * @param depth_ref 参考像素的深度值 * @param T21 从第一个相机到第二个相机的变换矩阵 */
void DirectPoseEstimationMultiLayer( const cv::Mat &img1, const cv::Mat &img2, const VecVector2d &px_ref, const vector<double> depth_ref, Sophus::SE3d &T21
); // 此函数定义了一个多层直接法位姿估计的接口/** * 使用直接法进行位姿估计(单层) * @param img1 第一个图像 * @param img2 第二个图像 * @param px_ref 参考像素坐标 * @param depth_ref 参考像素的深度值 * @param T21 从第一个相机到第二个相机的变换矩阵 */
void DirectPoseEstimationSingleLayer( const cv::Mat &img1, const cv::Mat &img2, const VecVector2d &px_ref, const vector<double> depth_ref, Sophus::SE3d &T21
); // 此函数定义了一个单层直接法位姿估计的接口// 双线性插值函数
inline float GetPixelValue(const cv::Mat &img, float x, float y) { // 边界检查 if (x < 0) x = 0; if (y < 0) y = 0; if (x >= img.cols) x = img.cols - 1; if (y >= img.rows) y = img.rows - 1; // 获取像素位置对应的指针 uchar *data = &img.data[int(y) * img.step + int(x)]; float xx = x - floor(x); float yy = y - floor(y); // 进行双线性插值计算像素值 return float( (1 - xx) * (1 - yy) * data[0] + xx * (1 - yy) * data[1] + (1 - xx) * yy * data[img.step] + xx * yy * data[img.step + 1] );
} int main(int argc, char **argv) { // 读取左图像和视差图像 cv::Mat left_img = cv::imread(left_file, 0); cv::Mat disparity_img = cv::imread(disparity_file, 0); // 使用随机数生成器在左图像中随机选择像素,并生成对应的三维点 cv::RNG rng; int nPoints = 2000; // 选择的点数 int boarder = 20; // 边界宽度,避免选择图像边缘的像素 VecVector2d pixels_ref; // 参考像素坐标 vector<double> depth_ref; // 参考像素的深度值 // 在左图像中随机选择像素,并计算其深度值 for (int i = 0; i < nPoints; i++) { int x = rng.uniform(boarder, left_img.cols - boarder); int y = rng.uniform(boarder, left_img.rows - boarder); int disparity = disparity_img.at<uchar>(y, x); // 获取视差值 double depth = fx * baseline / disparity; // 计算深度值 depth_ref.push_back(depth); // 存储深度值 pixels_ref.push_back(Eigen::Vector2d(x, y)); // 存储像素坐标 } // 估计01~05.png图像的位姿 Sophus::SE3d T_cur_ref; // 当前图像相对于参考图像的位姿 // 遍历01~05.png图像,进行位姿估计 for (int i = 1; i < 6; i++) { cv::Mat img = cv::imread((fmt_others % i).str(), 0); // 读取图像 // 可以尝试取消注释以下行以使用单层直接法位姿估计 // DirectPoseEstimationSingleLayer(left_img, img, pixels_ref, depth_ref, T_cur_ref); DirectPoseEstimationMultiLayer(left_img, img, pixels_ref, depth_ref, T_cur_ref); // 使用多层直接法进行位姿估计 } return 0; // 程序正常退出
}
// 函数定义,用于直接估计两帧之间的位姿变换
void DirectPoseEstimationSingleLayer( const cv::Mat &img1, // 第一个输入图像 const cv::Mat &img2, // 第二个输入图像 const VecVector2d &px_ref, // 参考图像中的像素点坐标 const vector<double> depth_ref, // 参考图像中对应像素点的深度值 Sophus::SE3d &T21) { // 输出位姿变换矩阵,从第一帧到第二帧的变换 const int iterations = 10; // 设定迭代次数为10 double cost = 0, lastCost = 0; // 初始化当前和上一次迭代的代价值 // 记录开始时间 auto t1 = chrono::steady_clock::now(); // 初始化雅可比累加器,用于计算和优化位姿变换 JacobianAccumulator jaco_accu(img1, img2, px_ref, depth_ref, T21); // 开始迭代优化过程 for (int iter = 0; iter < iterations; iter++) { jaco_accu.reset(); // 重置雅可比累加器 // 并行计算每个像素点的雅可比矩阵和偏差 cv::parallel_for_(cv::Range(0, px_ref.size()), std::bind(&JacobianAccumulator::accumulate_jacobian, &jaco_accu, std::placeholders::_1)); // 获取当前位姿下的海森矩阵和偏差 Matrix6d H = jaco_accu.hessian(); Vector6d b = jaco_accu.bias(); // 使用LDLT分解法求解更新量 Vector6d update = H.ldlt().solve(b); // 更新位姿变换 T21 = Sophus::SE3d::exp(update) * T21; // 计算当前位姿下的代价 cost = jaco_accu.cost_func(); // 检查更新量是否为NaN,如果是则中断迭代 if (std::isnan(update[0])) { cout << "update is nan" << endl; break; } // 如果代价增加,中断迭代 if (iter > 0 && cost > lastCost) { cout << "cost increased: " << cost << ", " << lastCost << endl; break; } // 如果更新量的范数小于阈值,则认为已经收敛,中断迭代 if (update.norm() < 1e-3) { break; } lastCost = cost; // 更新上一次迭代的成本 cout << "iteration: " << iter << ", cost: " << cost << endl; // 输出迭代信息和成本 } // 输出最终的位姿变换矩阵 cout << "T21 = \n" << T21.matrix() << endl; // 记录结束时间,并计算运行时间 auto t2 = chrono::steady_clock::now(); auto time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1); cout << "direct method for single layer: " << time_used.count() << endl; // 在图像上显示投影点 cv::Mat img2_show; cv::cvtColor(img2, img2_show, CV_GRAY2BGR); VecVector2d projection = jaco_accu.projected_points(); // 获取投影点 // 遍历每个投影点,并在图像上绘制 for (size_t i = 0; i < px_ref.size(); ++i) { auto p_ref = px_ref[i]; auto p_cur = projection[i]; if (p_cur[0] > 0 && p_cur[1] > 0) { cv::circle(img2_show, cv::Point2f(p_cur[0], p_cur[1]), 2, cv::Scalar(0, 250, 0), 2); cv::line(img2_show, cv::Point2f(p_ref[0], p_ref[1]), cv::Point2f(p_cur[0], p_cur[1]), cv::Scalar(0, 250, 0)); } } // 显示并等待用户按键 cv::imshow("current", img2_show); cv::waitKey();
}
void JacobianAccumulator::accumulate_jacobian(const cv::Range &range) { // 定义并初始化一些参数 const int half_patch_size = 1; // 区块半径 int cnt_good = 0; // 记录有效点的数量 Matrix6d hessian = Matrix6d::Zero(); // 初始化海森矩阵为0 Vector6d bias = Vector6d::Zero(); // 初始化偏置向量为0 double cost_tmp = 0; // 初始化临时代价为0 // 遍历给定的范围 for (size_t i = range.start; i < range.end; i++) { // 通过参考图像中的点计算在当前图像中的投影 Eigen::Vector3d point_ref = depth_ref[i] * Eigen::Vector3d((px_ref[i][0] - cx) / fx, (px_ref[i][1] - cy) / fy, 1); Eigen::Vector3d point_cur = T21 * point_ref; // 使用变换矩阵T21进行变换 if (point_cur[2] < 0) // 如果深度无效,则跳过此点 continue; // 计算投影在当前图像中的像素坐标 float u = fx * point_cur[0] / point_cur[2] + cx, v = fy * point_cur[1] / point_cur[2] + cy; // 如果投影点超出了图像边界,则跳过此点 if (u < half_patch_size || u > img2.cols - half_patch_size || v < half_patch_size || v > img2.rows - half_patch_size) continue; projection[i] = Eigen::Vector2d(u, v); // 保存投影点的坐标 // 提取并计算一些中间变量,以提高效率 double X = point_cur[0], Y = point_cur[1], Z = point_cur[2], Z2 = Z * Z, Z_inv = 1.0 / Z, Z2_inv = Z_inv * Z_inv; cnt_good++; // 有效点数量加1 // 在补丁范围内计算误差和雅可比矩阵 for (int x = -half_patch_size; x <= half_patch_size; x++) for (int y = -half_patch_size; y <= half_patch_size; y++) { // 计算两个图像在对应位置的像素值之差作为误差 double error = GetPixelValue(img1, px_ref[i][0] + x, px_ref[i][1] + y) - GetPixelValue(img2, u + x, v + y); // 初始化像素对相机位姿的雅可比矩阵 Matrix26d J_pixel_xi; Eigen::Vector2d J_img_pixel; // 计算J_pixel_xi,即像素坐标对相机位姿的偏导数 // ... (此处省略了具体的偏导数计算过程,代码已直接给出结果) // 计算图像梯度J_img_pixel,使用中心差分法 J_img_pixel = Eigen::Vector2d( 0.5 * (GetPixelValue(img2, u + 1 + x, v + y) - GetPixelValue(img2, u - 1 + x, v + y)), 0.5 * (GetPixelValue(img2, u + x, v + 1 + y) - GetPixelValue(img2, u + x, v - 1 + y)) ); // 计算总的雅可比矩阵J Vector6d J = -1.0 * (J_img_pixel.transpose() * J_pixel_xi).transpose(); // 累加海森矩阵和偏置向量,以及计算临时成本 hessian += J * J.transpose(); bias += -error * J; cost_tmp += error * error; } } // 如果有有效点,则更新全局的海森矩阵、偏置向量和代价值 if (cnt_good) { unique_lock<mutex> lck(hessian_mutex); // 使用互斥锁保证线程安全 H += hessian; // 累加海森矩阵 b += bias; // 累加偏置向量 cost += cost_tmp / cnt_good; // 计算平均成本 }
}
// 函数声明:直接姿态估计多层方法
// 输入:两个图像(img1, img2),参考像素坐标(px_ref),参考深度值(depth_ref)
// 输出:从第一个图像坐标系到第二个图像坐标系的变换矩阵T21
void DirectPoseEstimationMultiLayer( const cv::Mat &img1, // 第一个输入图像 const cv::Mat &img2, // 第二个输入图像 const VecVector2d &px_ref, // 参考像素坐标 const vector<double> depth_ref, // 参考像素对应的深度值 Sophus::SE3d &T21) { // 输出变换矩阵 // 定义参数 int pyramids = 4; // 图像金字塔的层数 double pyramid_scale = 0.5; // 金字塔每一层的缩放比例 double scales[] = {1.0, 0.5, 0.25, 0.125}; // 金字塔每一层的实际缩放系数 // 创建图像金字塔 vector<cv::Mat> pyr1, pyr2; // 图像金字塔 for (int i = 0; i < pyramids; i++) { if (i == 0) { pyr1.push_back(img1); // 如果是第一层,则直接加入原图 pyr2.push_back(img2); } else { cv::Mat img1_pyr, img2_pyr; // 对前一层图像进行缩放,以构建当前层的图像 cv::resize(pyr1[i - 1], img1_pyr, cv::Size(pyr1[i - 1].cols * pyramid_scale, pyr1[i - 1].rows * pyramid_scale)); cv::resize(pyr2[i - 1], img2_pyr, cv::Size(pyr2[i - 1].cols * pyramid_scale, pyr2[i - 1].rows * pyramid_scale)); pyr1.push_back(img1_pyr); // 将缩放后的图像添加到金字塔中 pyr2.push_back(img2_pyr); } } double fxG = fx, fyG = fy, cxG = cx, cyG = cy; // 备份原始的相机内参 for (int level = pyramids - 1; level >= 0; level--) { VecVector2d px_ref_pyr; // 存储当前金字塔层级的参考像素坐标 for (auto &px: px_ref) { px_ref_pyr.push_back(scales[level] * px); // 根据缩放系数调整参考像素坐标 } // 根据金字塔层级调整相机内参 fx = fxG * scales[level]; fy = fyG * scales[level]; cx = cxG * scales[level]; cy = cyG * scales[level]; // 对当前金字塔层级进行直接姿态估计 DirectPoseEstimationSingleLayer(pyr1[level], pyr2[level], px_ref_pyr, depth_ref, T21); }
}
注:上述路径需改为绝对路径.
3. 报错解决方案
(1)路径问题
修改2个cpp文件路径如下
- optical_flow.cpp
string file_1 = "/home/user_name/slambook2/ch8/LK1.png"; // first image
string file_2 = "/home/user_name/slambook2/ch8/LK2.png"; // second image
- direct_method.cpp
string left_file = "/home/user_name/slambook2/ch8/left.png";
string disparity_file = "/home/user_name/slambook2/ch8/disparity.png";
boost::format fmt_others("/home/user_name/slambook2/ch8/%06d.png"); // other files
(2)opencv4安装
问题1:error: invalid initialization of reference of type ‘const cv::ParallelLoopB
原因1:之前章节安装的是opencv3,而本章运用了一些opencv4中的函数,且CMakeLists.txt中也有find_package(OpenCV 4 REQUIRED),故直接安装opencv4
解决1:参考:opencv4安装步骤
问题2:error: “CV_GRAY2BGR was not declared in this scope cv::cvtColor(img2,img2_single,CV_GRAY2BGR)”
解决2:将optical_flow.cpp与direct_method.cpp两个文件中的CV_GRAY2BGR 改为 cv::COLOR_GRAY2BGR(注意区分大小写)。Ctrl+f 查找并修改(2个文件共需修改4处)
这篇关于视觉SLAM学习打卡【8-2】-视觉里程计·直接法代码详解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





