鲁棒专题

基于成像激光雷达的鲁棒位置识别
点云PCL免费知识星球,点云论文速读。 文章:Robust Place Recognition using an Imaging Lidar 作者:Tixiao Shan, Brendan Englot, Fabio Duarte, Carlo Ratti, and Daniela Rus 编译:点云PCL(ICRA 2021) 开源代码:https://github.com/TixiaoSha
文章解读与仿真程序复现思路——电力自动化设备EI\CSCD\北大核心《考虑可逆固体氧化物电池的虚拟电厂分布鲁棒优化运行》
本专栏栏目提供文章与程序复现思路,具体已有的论文与论文源程序可翻阅本博主免费的专栏栏目《论文与完整程序》 论文与完整源程序_电网论文源程序的博客-CSDN博客https://blog.csdn.net/liang674027206/category_12531414.html 电网论文源程序-CSDN博客电网论文源程序擅长文章解读,论文与完整源程序,等方面的知识,电网论文源程序关注python
文章解读与仿真程序复现思路——电力自动化设备EI\CSCD\北大核心《含氢综合能源系统多目标最优折中分布鲁棒低碳调度》
本专栏栏目提供文章与程序复现思路,具体已有的论文与论文源程序可翻阅本博主免费的专栏栏目《论文与完整程序》 论文与完整源程序_电网论文源程序的博客-CSDN博客https://blog.csdn.net/liang674027206/category_12531414.html 电网论文源程序-CSDN博客电网论文源程序擅长文章解读,论文与完整源程序,等方面的知识,电网论文源程序关注python

Boosting和Bagging: 如何开发一个鲁棒的机器学习算法
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Ben Rogojan 编译:ronghuaiyang 导读 机器学习和数据科学需要的不仅仅是将数据放入python库中并利用得到的结果。数据科学家需要真正理解数据和数据背后的过程,才能实现一个成功的系统。这篇文章从Bootstraping开始介绍,让你听懂什么是Boosting,什么是Bagging。 机器学习和数据科学

16.5 DarLoc:基于深度学习和数据特征增强的鲁棒室内磁定位
文献来源: Wang Q, Jia J, Deng Y, et al. DarLoc: Deep learning and data-feature augmentation based robust magnetic indoor localization[J]. Expert Systems with Applications, 2024, 244: 122921. 摘要: 由于地磁场的

Point-LIO:鲁棒高带宽激光惯性里程计
1. 动机 现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。 2. 主要贡献 1) 提出了一种逐
文章解读与仿真程序复现思路——电网技术EI\CSCD\北大核心《基于保守度自适应优化的综合能源系统鲁棒灵活性评估》
本专栏栏目提供文章与程序复现思路,具体已有的论文与论文源程序可翻阅本博主免费的专栏栏目《论文与完整程序》 论文与完整源程序_电网论文源程序的博客-CSDN博客https://blog.csdn.net/liang674027206/category_12531414.html 电网论文源程序-CSDN博客电网论文源程序擅长文章解读,论文与完整源程序,等方面的知识,电网论文源程序关注python
文章解读与仿真程序复现思路——中国电机工程学报EI\CSCD\北大核心《考虑协变量因素的多能微电网两阶段分布鲁棒优化调度》
本专栏栏目提供文章与程序复现思路,具体已有的论文与论文源程序可翻阅本博主免费的专栏栏目《论文与完整程序》 论文与完整源程序_电网论文源程序的博客-CSDN博客https://blog.csdn.net/liang674027206/category_12531414.html 电网论文源程序-CSDN博客电网论文源程序擅长文章解读,论文与完整源程序,等方面的知识,电网论文源程序关注python

【计算机视觉】Lecture 15:鲁棒估计:RANSAC
回忆:参数估计 假设我们找到了两幅图像之间的匹配点,我们认为它们是通过一些参数化变换(例如平移;尺度欧几里德;仿射)相关联的。我们如何估计此变换的参数? 基本策略 基于对应点的最小二乘估计 但这个方法有一些问题… 问题:异常点(外点Outliers) 粗略地说,外点是不符合模型的点。 错误数据->外点 粗略地说,外点是不符合模型的点。 符合模型的点被称为内点 外点问题 最
Fourier 测试时间自适应与多级一致性用于鲁棒分类
文章目录 Fourier Test-Time Adaptation with Multi-level Consistency for Robust Classification摘要方法实验结果 Fourier Test-Time Adaptation with Multi-level Consistency for Robust Classification 摘要 该研究提出
考虑机组禁止运行区间的含风电的鲁棒机组组合
2.1目标函数: 目标函数主要考虑了投资成本和运行成本两部分,其中,投资成本主要为储能的等年值投资成本,运行成本则包括配电网交互成本(购售电成本)、各单元运维成本以及微型燃气轮机的燃料成本。 2.2 各单元约束条件 2.2.1微型燃气轮机 2.2.2配电网交互 2.2.3储能 1储能充放电功率约束 (2)2储能荷电状态(State of Charge,
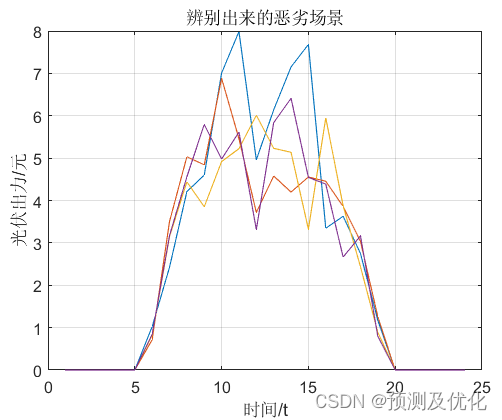
随机自适应鲁棒方法!基于恶劣场景辨别法的微网随机自适应鲁棒模型程序代码!
前言 随着分布式电源(distributed generator,DG)接入电网比例的不断提高,其出力的随机性和间歇性对电力系统的安全稳定运行构成威胁。微网凭借先进的智能计量技术、协调控制技术以及信息通信技术,为有效解决DG并网提供了新的思路。然而,由于电价的波动性和风光出力的随机性,不平衡惩罚依然存在,微网参与市场竞标仍存在很大的风险。微网往往聚合可再生能源、储能、需求响应(demand re
开源代码分享(21)-两阶段鲁棒优化的主动配电网动态无功优化
1.引言 由于分布式电源接入配电网的比例不断升高,分布式电源出力和负荷难以准确预测,给配电网的无功优化带来了许多不确定性,使得传统的的确定性无功优化模型得到的控制策略不准确。考虑设备损耗,配电网的无功控制装置中的分组投切电容器组和有载调压分接头,这些装置不能频繁的操作,虽然这些装置能够有效的应对电压波动,但是针对快速的秒级到分钟级的较小电压波动 的,一方面受限于操作次数的限制,不
鲁棒线性模型估计(Robust linear model estimation)
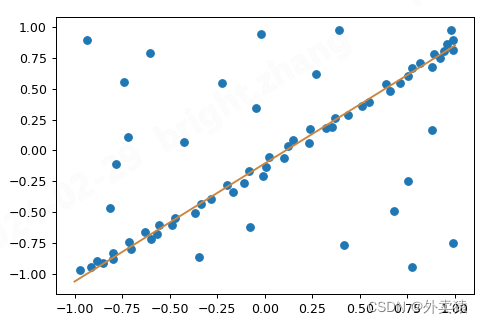
鲁棒线性模型估计 1.RANSAC算法1.1 算法的基本原理1.2 迭代次数N的计算1.3 参考代码 参考文献 当数据中出现较多异常点时,常用的线性回归OLS会因为这些异常点的存在无法正确估计线性模型的参数: W = ( X T X ) − 1 X T Y \qquad \qquad W=(X^TX)^{-1}X^TY W=(XTX)−1XTY 此时就需要寻找更鲁棒的方法过滤掉
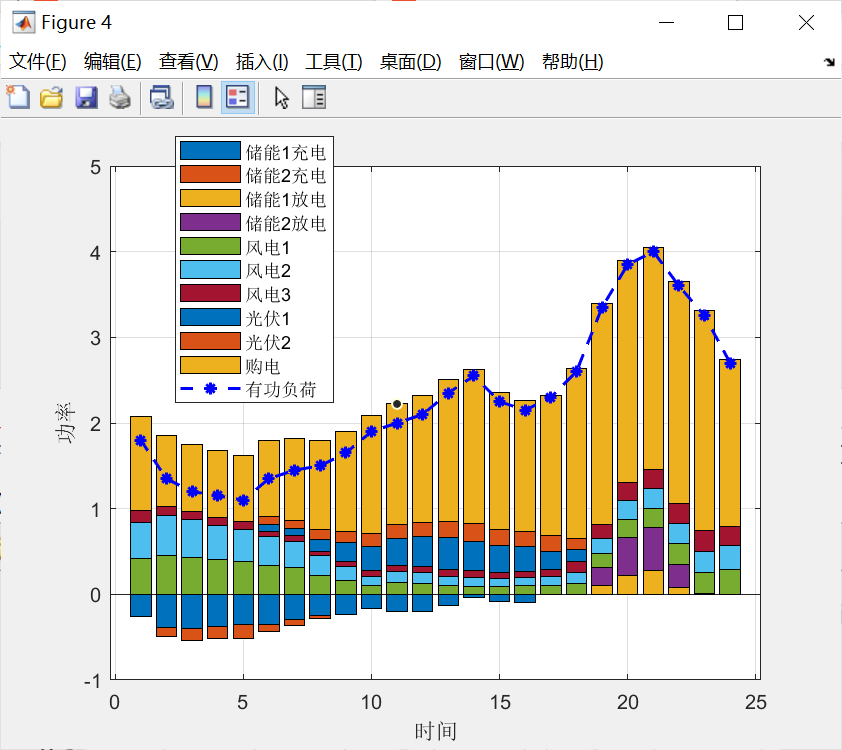
Matlab|基于两阶段鲁棒优化的微网电源储能容量优化配置
目录 主要内容 1.1 目标函数 1.2 约束条件 1.3 不确定变量 部分代码 结果一览 下载链接 主要内容 程序主要复现的是《考虑寿命损耗的微网电池储能容量优化配置》,解决微网中电源/储能容量优化配置的问题,即风电、光伏、储能以及燃气轮机的容量规划问题,程序考虑了不确定性,采用两阶段鲁棒优化方法进行优化,采用的是KKTCCG算法

随机优化与鲁棒优化的适应性分析
随机优化和鲁棒优化是处理不确定性问题的两种主要方法,它们在许多领域都有应用,比如供应链管理、能源系统优化、金融工程等。这两种方法在适应性方面有各自的特点和适用场景。 1.随机优化 随机优化考虑决策过程中不确定性的概率分布,旨在找到最优解以最小化期望成本或最大化期望收益。它通过使用随机变量的概率分布信息来显式地处理不确定性。适应性特点: 概率建模:适合于不确定性
91-互斥量的鲁棒属性
上一文有一个遗留练习,很重要,不知道同学们有没有做。先说结论吧,如果其中一个进程在未释放互斥量的情况下挂掉了,将会导致另一个线程永远无法获得锁,然后就死锁了。 为了能够让进程在异常终止时,释放掉互斥锁,需要指定 ROBUST 属性。所谓的 ROBUST,指是的健壮的意思。 1. 相关函数 可以通过下面两个函数设置和获取互斥量的鲁棒属性: int pthread_mutexattr_getr
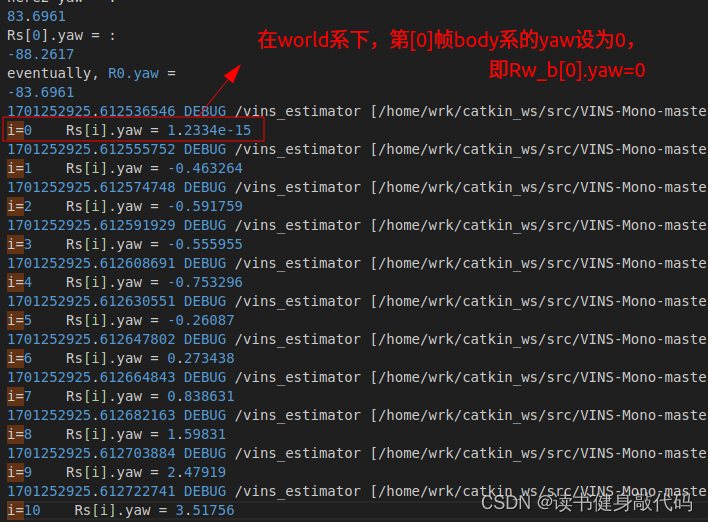
VINS-MONO代码解读3----vins_estimator(鲁棒初始化部分)
文章目录 0. 前言1. 旋转约束标定旋转外参Rbc1.1 八点法求取relative pose1.2 **旋转约束和旋转residual的构建**1.3 **左乘右乘的构建**1.4 **系数矩阵A的构建**1.5 鲁棒核函数1.6 q c b q_{cb} qcb 的求解 2. initialStructure()2.1 check IMU可观性(激励是否足够)2.2 构建并求解gl

TransNeXt:ViT的鲁棒Foveal视觉感知
文章目录 摘要1、引言2、相关工作3、方法3.1、聚合像素焦点注意力3.1.1、像素焦点注意力3.1.2、在单个混合器中聚合不同的注意力3.1.3、克服多尺度图像输入3.1.4、特征分析 3.2、卷积门控单元(Convolutional GLU)3.2.1、动机3.2.2、重新思考通道混合器设计 3.3、TransNeXt的架构设计 4、实验
文章解读与仿真程序复现思路——电网技术EI\CSCD\北大核心《含海上风电制氢的综合能源系统分布鲁棒低碳优化运行》
本专栏栏目提供文章与程序复现思路,具体已有的论文与论文源程序可翻阅本博主免费的专栏栏目《论文与完整程序》 论文与完整源程序_电网论文源程序的博客-CSDN博客https://blog.csdn.net/liang674027206/category_12531414.html 电网论文源程序-CSDN博客电网论文源程序擅长文章解读,论文与完整源程序,等方面的知识,电网论文源程序关注python

Matlab|【EI复现】电动汽车集群并网的分布式鲁棒优化调度模型
目录 1 内容简介 2 关键知识点 2.1 三类电动汽车模型 3 程序结果 4 下载链接 1 内容简介 电动汽车的数据模型种类繁多,但是用到比较高阶数学方法的并不多,本次分享的程序是下图所示的文章。 采用分布鲁棒优化模型,用到鲁棒对等转换,并采用ADMM算法进行求解,程序和文章方法一致,具有较好的参考价值。 2 关键知识点 2.1 三类电动汽车模型 根
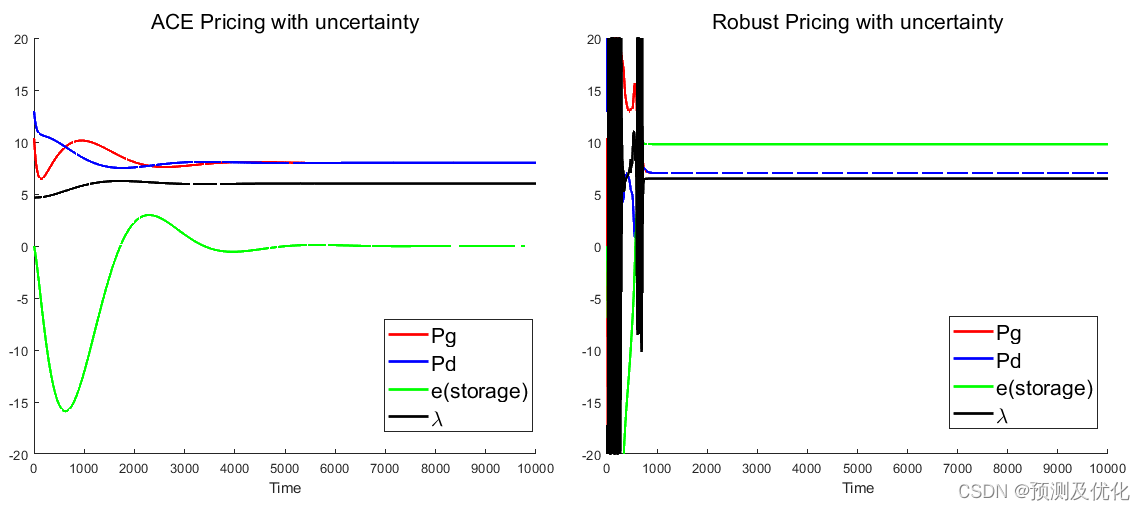
Trans论文复现:考虑源荷不平衡性的微电网鲁棒定价方法程序代码!
适用平台:Matlab+Yalmip+Cplex/Gurobi 程序针对目前微电网中高比例新能源发电的波动性和间歇性,提出了考虑源荷不平衡特性的微电网鲁棒定价方法,综合考虑电力市场边际收益和边际成本,利用价格波动来平衡电源和负荷。程序算例丰富、注释清晰、干货满满,可扩展性和创新性很高!下面对文章和程序做简要介绍! 程序创新点: 1)所建立的模型更具通用性和鲁棒性,考虑了系统扰动和RES的
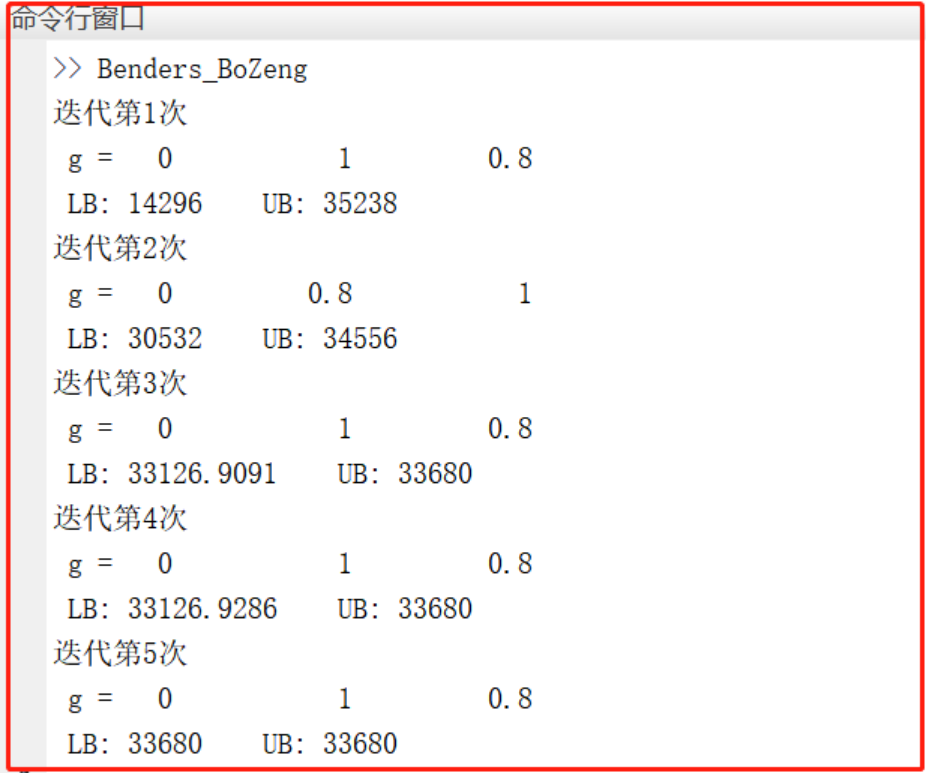
【免费】两阶段鲁棒优化matlab实现——CCG和benders
目录 1 主要内容 2 部分代码 3 程序结果 4 下载链接 1 主要内容 程序采用matlab复现经典论文《Solving two-stage robust optimization problems using a column-and-constraint generation method》算例,实现了C&CG和benders算法两部分内容,通过对比学习能够方便掌握
探索LightGBM:异常值处理与鲁棒建模
导言 异常值是数据中的特殊点,可能导致模型的不准确性和不稳定性。在使用LightGBM进行建模时,处理异常值是非常重要的一步,以确保模型的鲁棒性和可靠性。本教程将详细介绍如何在Python中使用LightGBM进行异常值处理和鲁棒建模,并提供相应的代码示例。 加载数据 首先,我们需要加载数据集并准备数据用于模型训练。以下是一个简单的示例: import lightgbm as lgbfr

图像处理之《鲁棒图像隐写术:隐藏频率系数中的信息》论文精读
一、文章摘要 隐写术是一种将秘密信息隐藏到公共多媒体对象中而不会引起第三方怀疑的技术。然而,大多数现有的工作不能提供良好的抗有损JPEG压缩鲁棒性,同时保持相对较大的嵌入容量。提出了一种基于可逆神经网络的端到端鲁棒隐写系统。该方法将秘密信息直接隐藏到封面图像的离散余弦变换(DCT)系数中,而不是隐藏在空间域中,显著提高了鲁棒性和抗隐写安全性。首先提出了互信息损失来约束INN中的信息流。实现了双向

【从单张图像解锁深度信息】Depth Anything一种用于鲁棒单目深度估计的高度实用的解决方案
Depth Anything是一种用于鲁棒单目深度估计的高度实用的解决方案。 在不追求新颖的技术模块的情况下,我们的目标是建立一个简单而强大的基础模型,处理任何情况下的任何图像。 为此,我们通过设计数据引擎来收集并自动注释大规模未标记数据(~62M)来扩展数据集,这显着扩大了数据覆盖范围,从而能够减少泛化误差。 我们研究了两种简单而有效的策略,使数据扩展前景光明。 首先,利用数据增强工具创建更