激光专题

无人叉车3d激光slam多房间建图定位异常处理方案-墙体画线地图切分方案
墙体画线地图切分方案 针对问题:墙体两侧特征混淆误匹配,导致建图和定位偏差,表现为过门跳变、外月台走歪等 ·解决思路:预期的根治方案IGICP需要较长时间完成上线,先使用切分地图的工程化方案,即墙体两侧切分为不同地图,在某一侧只使用该侧地图进行定位 方案思路 切分原理:切分地图基于关键帧位置,而非点云。 理论基础:光照是直线的,一帧点云必定只能照射到墙的一侧,无法同时照到两侧实践考虑:关

三维激光扫描点云配准外业棋盘的布设与棋盘坐标测量
文章目录 一、棋盘标定板准备二、棋盘标定板布设三、棋盘标定板坐标测量 一、棋盘标定板准备 三维激光扫描棋盘是用来校准和校正激光扫描仪的重要工具,主要用于提高扫描精度。棋盘标定板通常具有以下特点: 高对比度图案:通常是黑白相间的棋盘格,便于识别。已知尺寸:每个格子的尺寸是已知的,可以用于计算比例和调整。平面标定:帮助校准相机和激光扫描仪之间的位置关系。 使用方法 扫描棋盘:
激光SLAM如何动态管理关键帧和地图
0. 简介 个人在想在长期执行的SLAM程序时,当场景发生替换时,激光SLAM如何有效的更新或者替换地图是非常关键的。在看了很多Life-Long的文章后,个人觉得可以按照以下思路去做。这里可以给大家分享一下 <br/> 1. 初始化保存关键帧 首先对应的应该是初始化设置,初始化设置当中会保存关键帧数据,这里的对应的关键帧点云数据会被存放在history_kf_lidar当中,这个数据是和

镭射定位灯激光定位使用注意事项?
在现代工业、建筑测量、舞台设计以及科研实验等领域,镭射定位灯(常称激光定位器)因其高精度、远射程和直观性而得到广泛应用。然而,激光作为一种高强度光束,其使用若不当,不仅可能损害设备,还可能对人体健康造成危害。因此,掌握镭射定位灯激光定位的正确使用方法及注意事项至关重要。下面就跟着鑫优威一起来了解一下。 一、安全为先,做好防护 首先,操作者必须佩戴符合标准的激光防护眼镜,以防止激光直
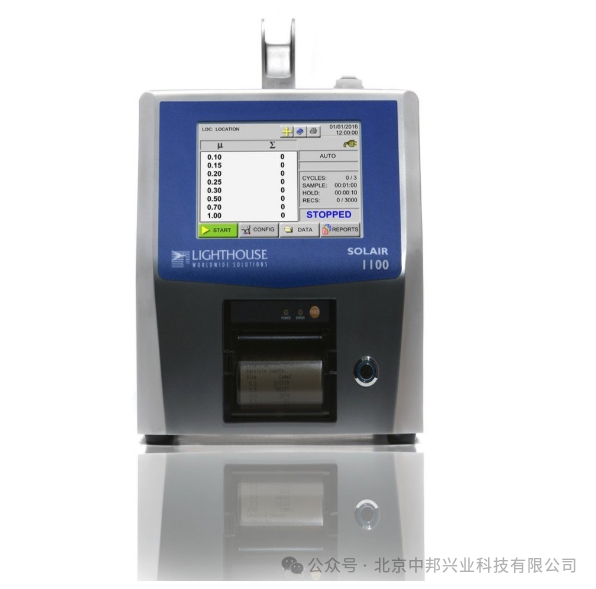
激光尘埃粒子计数器内光源选择:半导体激光管OR氦氖激光管?
在选择激光尘埃粒子计数器时,关键考虑因素包括光源类型、测量范围、灵敏度、稳定性、使用寿命以及应用场景等。针对这些因素,我们可以对半导体激光器和氦氖激光器(He-Ne激光器)进行比较,以判断选择哪种激光尘埃粒子计数器更合适。 激光管定义 半导体激光管(激光二极管) 半导体激光管,也被称为激光二极管(Laser Diode),是一种利用半导体PN结将电流转换成光能并产生激


2d激光点云识别退化场景(长走廊)
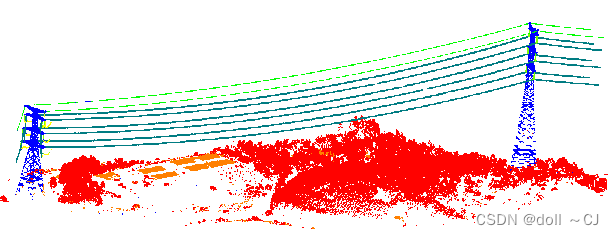
注:算法只适用于静态场景,在有动态场景(行人)的环境下不适用 退化场景描述 场景一:长走廊 激光探测距离有限,在长走廊环境下,激光在某些位置无法探测到走廊尽头,会出现如上图情况,激光轮廓为红色的两条平行线。对于这种情况,我们只需寻找到只有两个平行线,即位退化场景 场景二:单一墙面 通常情况下,退化场景为如上两种情况,当然多条平行线也是符合的。 算法思路为,如果激光雷达点云构成的特征都是平行线

IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
更多优质内容,请关注公众号:智驾机器人技术前线 1.论文信息 论文标题:IGE-LIO: Intensity Gradient Enhanced Tightly-Coupled LiDAR-Inertial Odometry 作者:Ziyu Chen, Hui Zhu, Biao Yu, Chunmao Jiang, Chen Hua, Xuhui Fu and Xinkai Kuan

LIO-SAM: 紧耦合的激光与惯导里程计方案
点云PCL免费知识星球,点云论文速读。 标题:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 作者:Tixiao Shan, Brendan Englot, Drew Meyers, Wei Wang, Carlo Ratti, and Daniela Rus 来源:分享者 欢迎各位加入免费知识

SLAM激光导航 | 地牛式AGV机器人,“7*24小时”玩着工作!
agv 地牛AGV是一种小巧方便,使用灵活,载重量大,结实耐用的货物搬运工具。最大特点是可以直接叉取、提升和搬运托盘,不需要再额外利用铁架进行支撑,不仅更省成本,而且运作更灵活,“托盘在哪里,就可以点到点搬运到哪里。” 地牛AGV 地牛AGV小巧而精悍,实现了多行业、多场景化应用,应用前景广阔。驱动方式采用独立的双舵轮驱动,具有转向角灵活可调的功能,实现四向行走、原地
![[激光原理与应用-125]:南京科耐激光-激光焊接 - 焊中无损检测技术 - 智能制程监测系统IPM介绍 - 25-传统的时域波形分析法、时域包络线分析法](https://i-blog.csdnimg.cn/direct/105bb2facaea44d2aa57b021af22404e.png)
[激光原理与应用-125]:南京科耐激光-激光焊接 - 焊中无损检测技术 - 智能制程监测系统IPM介绍 - 25-传统的时域波形分析法、时域包络线分析法
目录 前言: 一、时域波形分析法 1.1 时域波形分析法的基本概念 1.2 时域波形分析法的具体步骤 1.3 时域波形分析法的特点 二、时域包络线分析法 2.1 单信号的包络线 1. 定义 2. 分析步骤 3. 应用领域 4. 优点与局限性 2.2 多个时域信号组成的包络线:极值包络信号 三、激光焊接焊中缺陷检测:时域包络线分析法 3.1 激光焊接中的常见缺陷 3.2

iOS激光扫地机地图
最近在做一款激光扫地机地图,期间遇到了很多问题,在此做个记录,基本效果如下: 主要涉及到: 1、十六进制点阵转位图。 这部是绘制地图的关键,主要实现如下: NSData *newData = [NSData dataWithBytes:dstBuffer length:decompressLen];Byte *newByte = (Byte *)newData.bytes;char*

激光气体热值分析仪在线干法取样预处理装置制备方法
激光气体热值分析仪在线干法取样预处理装置制备方法 一、项目提出前状况: 在冶金企业产生大量的燃气副产品,主要有高炉煤气、转炉煤气、焦炉煤气,这些二次能源的高效利用是企业降本增效的重要途径。燃气热值是燃气最主要的质量指标,热值准确检测对燃气科学配比和有效利用具有重要意义。可燃气体热值仪检测不准是多年困绕于冶金、化工、电力等行业公认的技术难题,长期使用证明,目前使用的“燃烧式”热值仪无法准确实现可

什么是距离选通型水下三维激光扫描仪?(下)
距离选通激光水下成像的发展 距离选通激光成像技术始于上世纪60年代,受制于高性能脉冲激光器和选通成像器件发展的制约,激光距离选通成像技术在随后的二十年发展缓慢,直到20世纪90年代,随着硬件技术的不断成熟,该技术才得到迅速发展。 2016年黄子恒对水下三维成像技术总结为:基于条纹管的激光雷达系统的线扫描成像、多角度拍摄三维成像、点扫描三维成像技术以及基于距离选通成像系统的单帧三维成像和基于距离
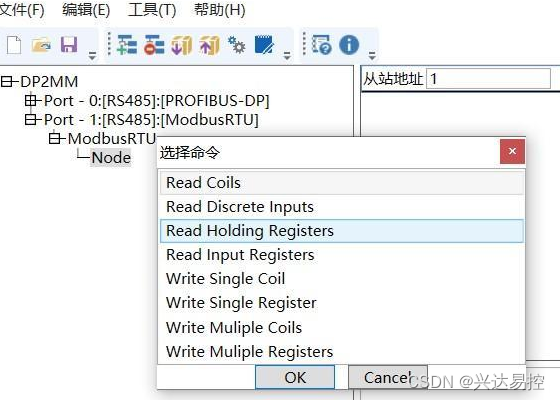
Modbus协议转Profibus协议网关模块连PLC与激光发射器通讯
一、概述 在PLC控制系统中,从站设备通常以Modbus协议,ModbusTCP协议,Profinet协议,Profibus协议,Profibus DP协议,EtherCAT协议,EtherNET协议等。本文将重点探讨PLC连接Modbus协议转Profibus协议网关模块(XD-MDPB100)与激光发射器通讯的相关内容,为您详细解析这一过程的原理与操作步骤。 二、PLC连接Modbus
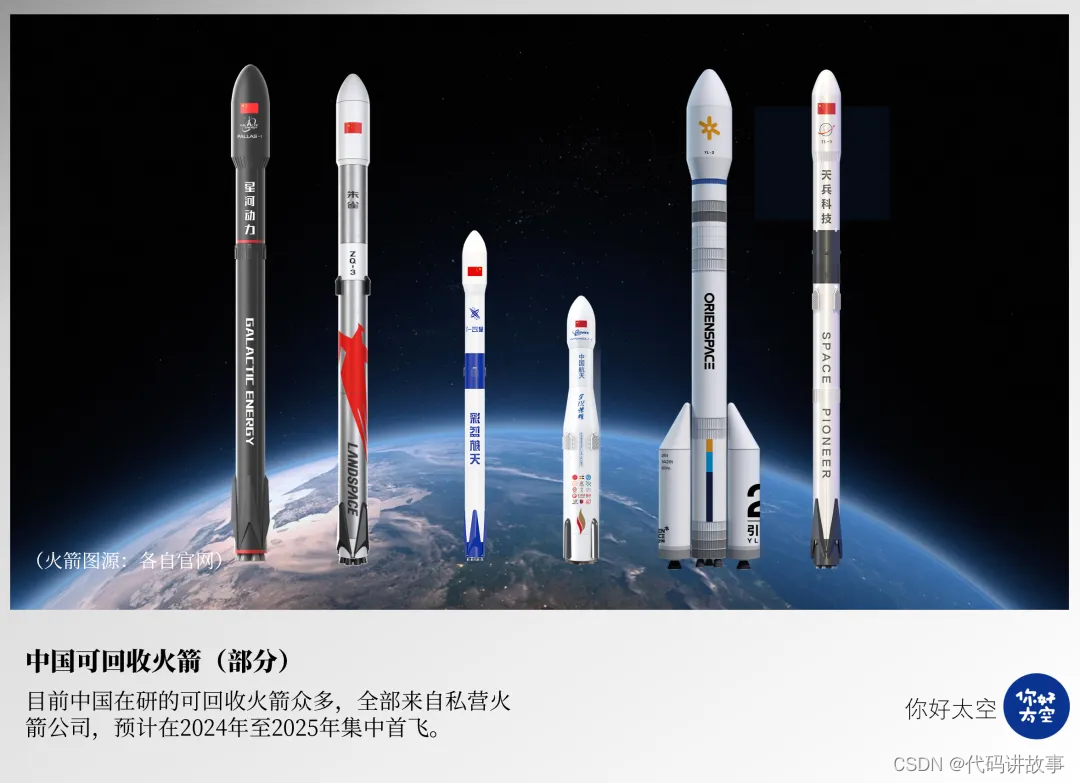
Starlink全系卫星详细介绍,波段频谱、激光星间链路技术、数据传输速率等等
Starlink全系卫星详细介绍,波段频谱、激光星间链路技术、数据传输速率等等。 Starlink是SpaceX公司开发的一个低轨道(LEO)卫星网络系统,旨在为全球用户提供高速宽带互联网服务。截至2024年6月,Starlink已经发射并运行了超过5600颗活跃卫星,构成了目前为止最大的卫星星座。 |Starlink的卫星类型 1.Starlink V1.5卫星 Starlink
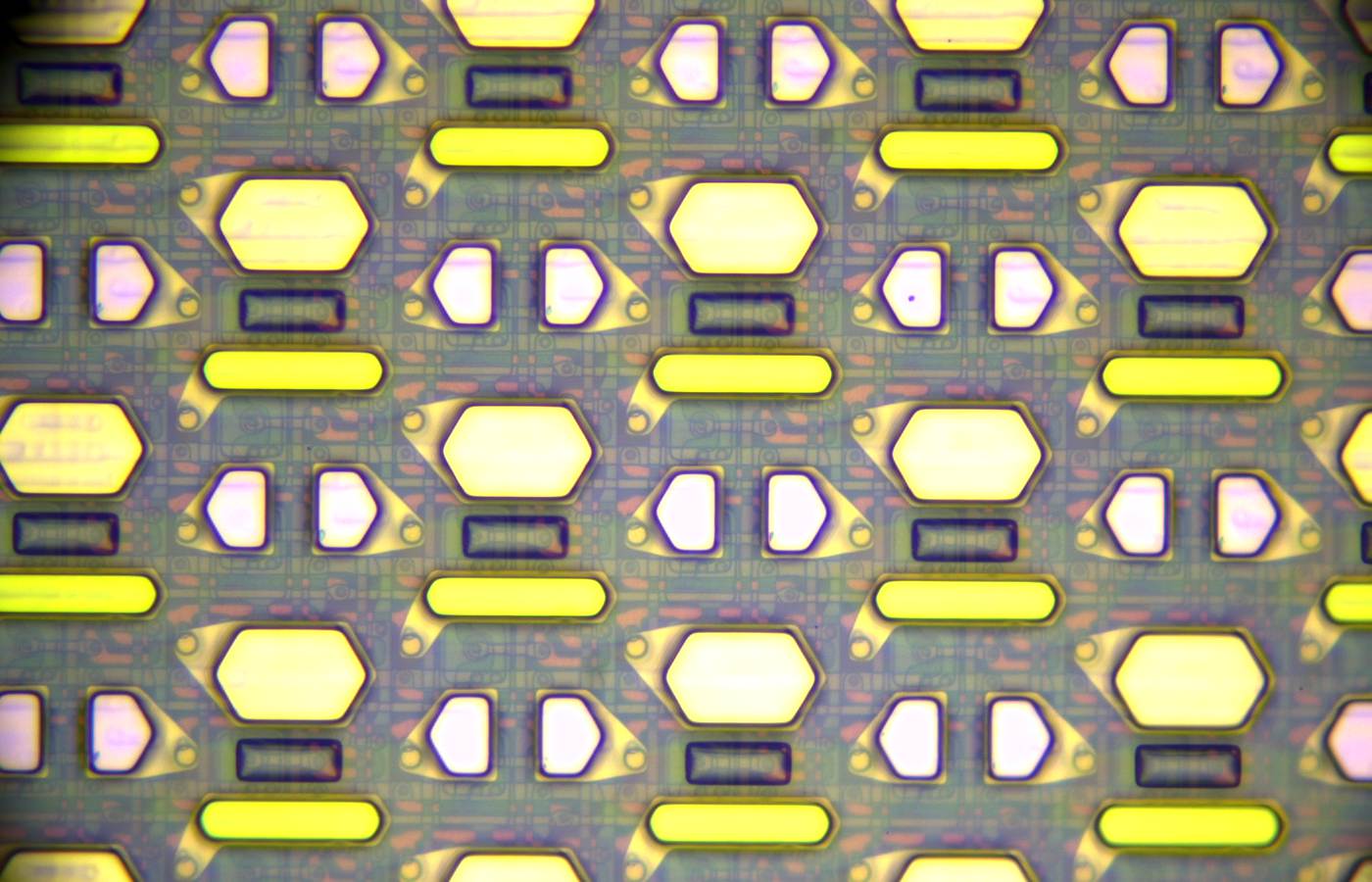
(南京观海微电子)——TFT激光修复技术
激光在显示面板修复方面的应用 液晶面板包括TFT玻璃、CF玻璃、面板以及后段模块组装等一系列工艺制作过程。每段过程中都会产生一定的缺陷,例如亮点、暗点、闪点、碎亮点等。这些缺陷会导致部分区域显示不良,但是我们可以通过暗点化、亮点化、ITO隔离、激光炸射等方法对其进行修复或淡化,在实际生产中大约有5%~8%的点缺陷产生,通过激光修复或淡化后,可提升面板生产良率,从而大大降低面板企业
基于PointNet / PointNet++深度学习模型的激光点云语义分割
一、场景要素语义分割部分的文献阅读笔记 1.1 PointNet PointNet网络模型开创性地实现了直接将点云数据作为输入的高效深度学习方法(端到端学习)。最大池化层、全局信息聚合结构以及联合对齐结构是该网络模型的三大关键模块,最大池化层解决了点云的无序性问题,全局信息聚合结构实现了点云不同层次特征信息和全局信息的融合,联合对齐结构保证了点云几何变换的语义不变性与特征空间的
【原创教程】三菱Q与MERLIN II LS激光打标机控制说明
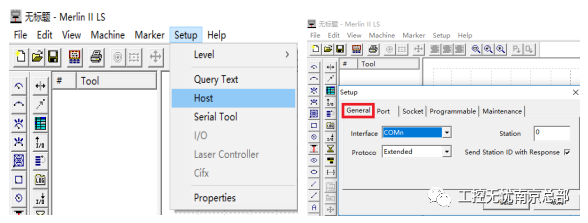
一、控制流程说明 1.硬件连接→2.软件通讯连接→3.编写远程控制PLC程序→4.编写通讯命令。 二、硬件连接1.用RJ45口普通网线将PLC和打标机连接。 三、软件通讯连接 1.打标机侧工控机-更改操作权限-点击菜单栏Setup,在下拉菜单中,点击Level,在下一级菜单点击Supervisor(左下图),进入Supervisor模式(右下图),如已设置密码,则进入密码输入界面,

激光点云配准算法——Cofinet / GeoTransforme / MAC
激光点云配准算法——Cofinet / GeoTransformer / MAC GeoTransformer + MAC是当前最SOTA的点云匹配算法,在之前我用总结过视觉特征匹配的相关算法 视觉SLAM总结——SuperPoint / SuperGlue 本篇博客对Cofinet、GeoTransformer、MAC三篇论文进行简单总结 1. Cofinet Cofinet发表于2021


Point-LIO:鲁棒高带宽激光惯性里程计
1. 动机 现有系统都是基于帧的,类似于VSLAM系统,频率固定(例如10Hz),但是实际上LiDAR是在不同时刻进行顺序采样,然后积累到一帧上,这不可避免地会引入运动畸变,从而影响建图和里程计精度。此外,这种低帧率会增加延时,限制系统带宽(里程计带宽的定义类似动态系统的带宽,即系统增益降至0.707以下的频率,表示里程计在能够满意地估计时可以运动多快)。 2. 主要贡献 1) 提出了一种逐

激光slam坐标系和视觉slam坐标系对齐,两个slam系统之间坐标对齐,轨迹对齐,时间戳对齐
1. 面临的问题 两个独立的SLAM系统中,常常面临一个问题,那就是一个系统上的某一个pose,对应到另一个系统中是在哪里? 紧耦合的SLAM系统,不存在这个问题,比如激光雷达和相机融合的SLAM系统,它们不存在上述问题! 造成这种关系不确定的最主要原因是:两个系统各自有自己的一个参考系。如果它俩在一个统一的世界参考系下,那么就不存在上述的问题。 我们立马想到的一个办法是,我让两个S

顶升搬运小车与激光叉车的实际应用案例
本项目旨在实现卡板的自动化运输与仓储管理,通过引入顶升搬运小车(AGV)与激光叉车两种自动化设备,提高运输效率,减少人工干预,并确保流程的顺畅与安全。 一、产品特性与需求分析 考虑到产品为单一种类的卡板,规格为1200mm*1000mm,我们选用了顶升搬运小车与激光叉车作为解决方案的核心设备。顶升搬运小车能够根据人工信号选择不同运输路线,实现卡板的灵活搬运;而激光叉车则负责仓储管理及卡板的
![[激光原理与应用-94]:电控 - 低噪声运放的原理](https://img-blog.csdnimg.cn/direct/e919c8e899434de29386e8f21467c98b.jpeg)
[激光原理与应用-94]:电控 - 低噪声运放的原理
目录 一、什么是低噪声运放 1.1 什么是低噪声水平 1.2 什么是高增益 在电子工程中的应用 在通信领域的应用 在音频和视频处理中的应用 注意事项 1.3 什么是宽带宽 1.4 什么是低偏置电流 重要性 特点 解决方法 应用 二、低噪声运放的原理图 1. 基本构成 2. 设计要点 3. 原理图示例(简化版) 4. 参数指标 5. 实际应用 三、低噪声运放L