本文主要是介绍IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
更多优质内容,请关注公众号:智驾机器人技术前线

1.论文信息
-
论文标题:IGE-LIO: Intensity Gradient Enhanced Tightly-Coupled LiDAR-Inertial Odometry
-
作者:Ziyu Chen, Hui Zhu, Biao Yu, Chunmao Jiang, Chen Hua, Xuhui Fu and Xinkai Kuang
-
作者单位:中国科学技术大学
-
论文地址:https://ieeexplore.ieee.org/abstract/document/10643007
2.摘要
同时定位与建图(SLAM)在移动机器人的状态估计中扮演着重要角色。大多数流行的激光雷达SLAM方法仅从环境的几何结构中提取特征点,这可能导致在退化场景中的定位不准确。在本文中,我们提出了一种新颖的框架,即强度梯度增强的紧耦合激光雷达-惯性里程计(IGE-LIO)。该框架提出了一种基于激光雷达强度梯度的特征提取方法,用于精确的姿态估计,克服了激光雷达-SLAM在退化环境中面临的挑战。计算每个激光雷达点的强度梯度后,我们从纹理信息中动态提取强度边缘点(IEPs)。此外,我们还基于几何信息提取了几何平面点(GPPs)和几何边缘点(GEPs)。然后,对每种类型的特征点进行误差分析,并设计了加权函数以校正测量噪声并减轻特征提取中额外不确定性引入的偏差。随后,通过结合点到平面和点到边缘关联的残差构建了一个迭代扩展卡尔曼滤波器(IEKF)框架。最后,在室内、室外和激光雷达退化场景中进行了广泛的实验。结果表明,与现有的仅几何方法相比,我们提出的方法在鲁棒性和准确性上有了显著提高,特别是在激光雷达退化场景中。
3.主要贡献
-
提出了一个鲁棒的LIO框架,通过迭代扩展卡尔曼滤波器紧耦合激光雷达的几何和纹理信息与IMU,用于姿态估计。该框架能够为旋转激光雷达和固态激光雷达实现最优结果;
-
提出了一种新颖的特征提取方法,它不仅提取几何平面点和几何边缘点,还计算每个激光雷达点的强度梯度,无需校准强度值,并使用动态阈值动态选择强度边缘点;
-
为了区分和权衡每个特征点在姿态优化中的质量,本文引入了一种新的加权函数,该函数联合融合了几何信息和强度信息,用于几何平面点、几何边缘点和强度边缘点。
4.核心思想与方法
根据几何和强度信息提取几何平面点、几何边缘点和强度边缘点。此外,使用设计好的加权函数对每种类型的特征点进行误差分析。然后,为不同类别的特征点分别计算残差,并对状态进行迭代更新,直到达到收敛。最后,将带有标签的特征点存储在全局地图中。结果表明,所提出的方法不仅在激光雷达退化场景中实现了准确、鲁棒和实时的定位和建图,而且超越了传统的激光雷达SLAM,达到了与包含视觉信息的SLAM方法相媲美的结果。

IGE-LIO架构
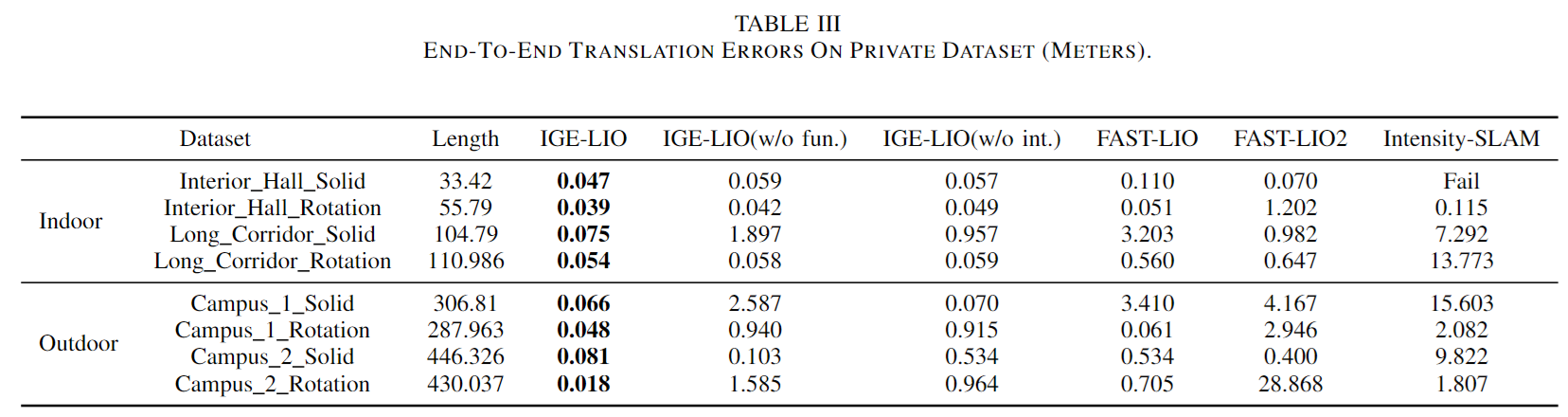
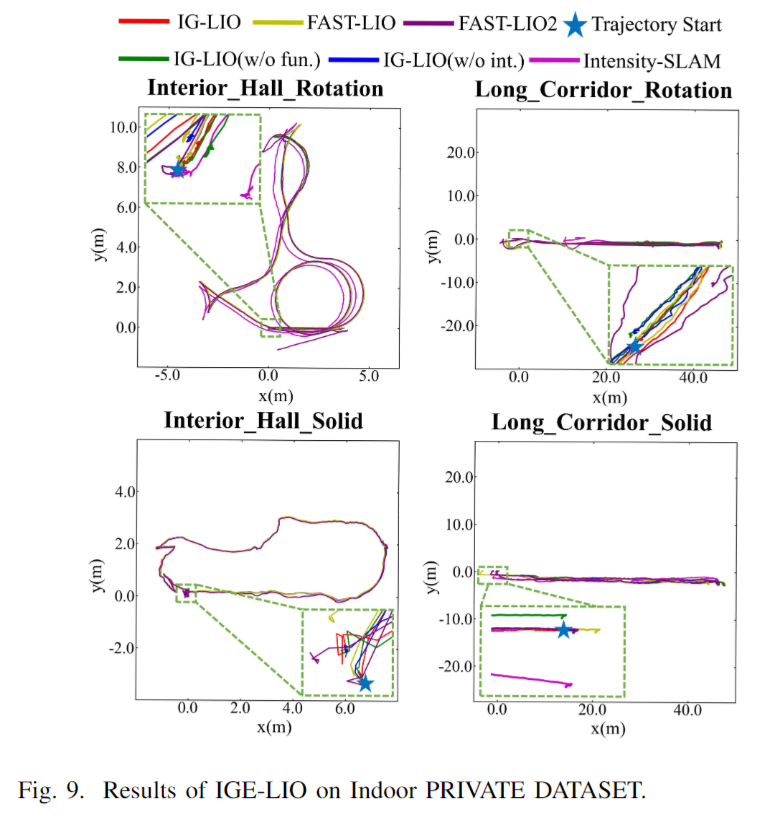
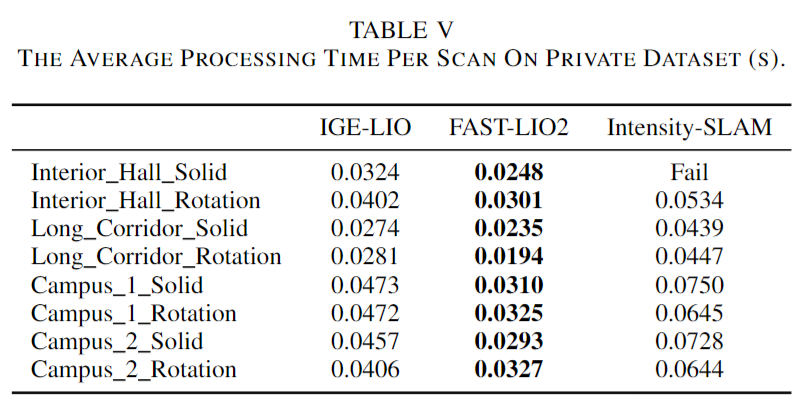
5.实验仿真验证



6.总结 && 展望
在本文中,提出了IGE-LIO,一种强度梯度增强的激光雷达-惯性融合框架,它比FAST-LIO2更加鲁棒和准确,在退化环境中与包含相机的FAST-LIVO相比达到了相当的精度水平。本文利用激光雷达的强度信息来提取额外的强度边缘点,并将激光雷达和惯性传感器的测量值融合在一个误差状态迭代卡尔曼滤波器中。大量的定量和定性实验表明,引入强度梯度和加权函数提高了LIO的准确性和鲁棒性。此外,本文展示了我们的系统在具有挑战性的场景中,包括室内、室外和激光雷达退化环境中,更加稳定和准确。未来的工作将引入后端优化和闭环检测以提高定位的全局一致性。

本文仅做学术分析,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线
这篇关于IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


