本文主要是介绍什么是距离选通型水下三维激光扫描仪?(下),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
距离选通激光水下成像的发展
距离选通激光成像技术始于上世纪60年代,受制于高性能脉冲激光器和选通成像器件发展的制约,激光距离选通成像技术在随后的二十年发展缓慢,直到20世纪90年代,随着硬件技术的不断成熟,该技术才得到迅速发展。
2016年黄子恒对水下三维成像技术总结为:基于条纹管的激光雷达系统的线扫描成像、多角度拍摄三维成像、点扫描三维成像技术以及基于距离选通成像系统的单帧三维成像和基于距离选通成像系统的多帧三维成像。
其中条纹管激光雷达成像原理有点类似多波束,脉冲激光器发出一个纵向条形脉冲光束照射目标区域,然后被条纹管探测器接收。而激光距离选通成像技术广义上是基于光的时间飞行法实现的,可对空间切片成像,因此,类似医学断层成像,可通过获取大量的场景 空间切片图像实现三维重建。不同于传统扫描激光雷达,距离选通三维成像技术采用选通面阵图像传感器(ICCD或ICMOS)作为成像器件,像素规模可超过百万。
2024年王新伟对距离选通成像技总结为:经过几十多年的发展,国内外学者已提出了步进延时扫描、增益调制和距离能量相关等激光距离选通三维成像技术。
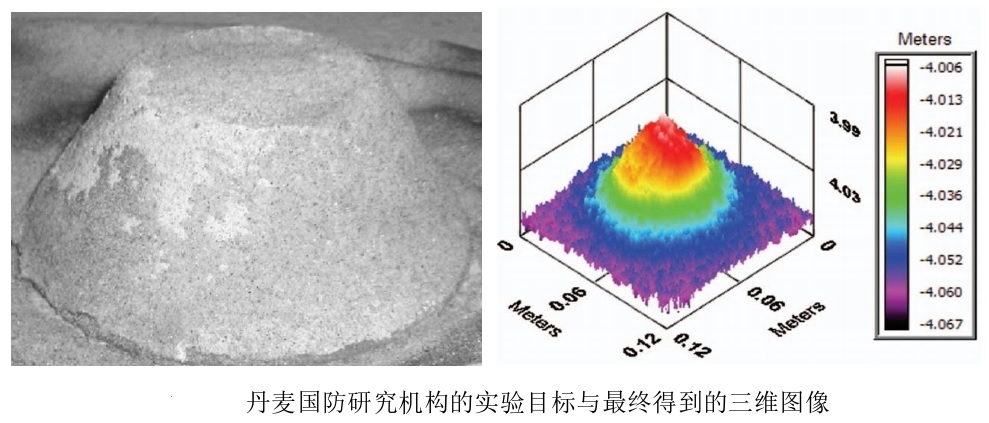
2004年,丹麦国防研究组织的Jens Busk等人提出了一种延时切片扫描三维成像技术,通过延时步进的方式获取不同距离下的选通图像序列,即通过带选通门的激光雷达系统中距离选通导致的激光回波信号在因目标表面各点距离变化导致的强度变化,反演得出目标各点的距离信息,成功对水下小型锥型物体进行了三维成像(下视扫描)。
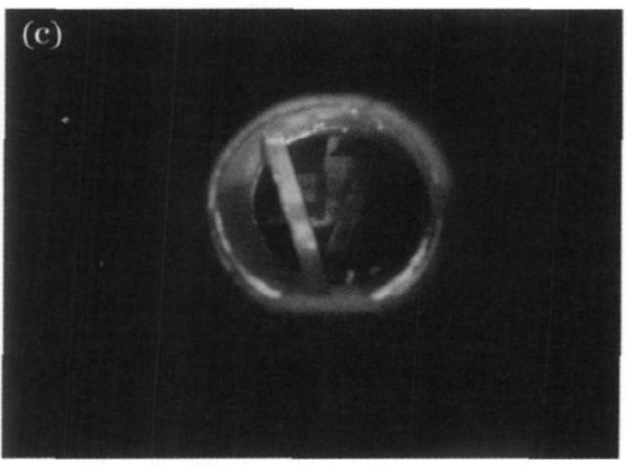
2010年北京理工大学李海兰采用了在多帧距离选通图像的基础上对目标进行三维成像 的方式,该方法通过距离选通系统,抑制了水下成像过程中后向散射的干扰,成功对水管内部不同距离位置处的多块木板进行了三维成像。
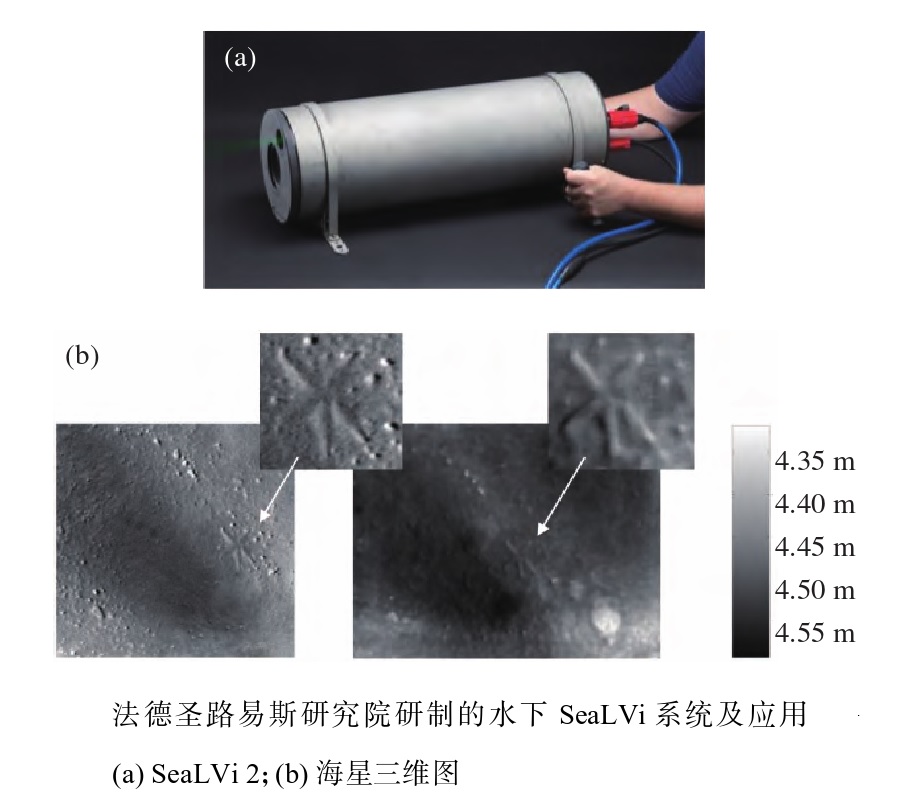
2014年,法德圣路易斯研究院(French-German Research InstituteSaint Louis’s,ISL)采用梯形距离能量相关三维成像技术利用水下SeaLVi系统开展了水下详查和水下导航等海上应用研究。下图中,左图是基于19幅选通图像利用延时切片扫描获得的海星三维图像,右图是 基于两幅选通图像利用梯形距离能量相关获得的海星三维图像。
2016年黄子恒采用改进的距离选通成像技术(三角形距离能量相关),对试验水池中的塑胶水桶(直径为 40cm,距离15m)进行成像。

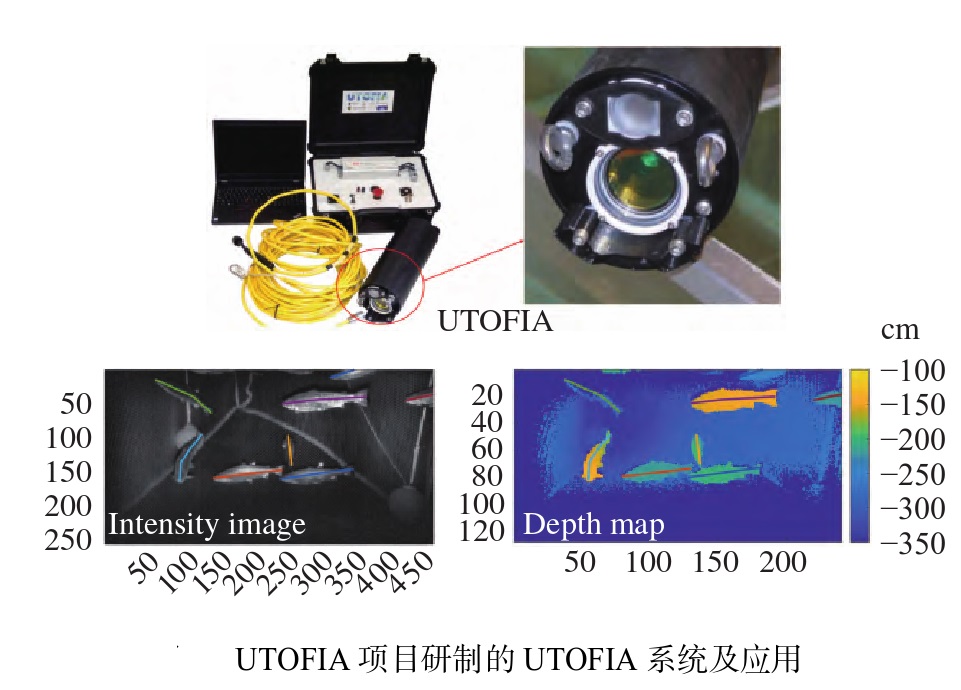
2018年欧盟UTOFIA计划基于所提出的延时寻峰扫描三维成像研制的UTOFIA系统,并将该技术用于水下生态监测,开展了水下鱼类尺寸原位测量等应用研究。
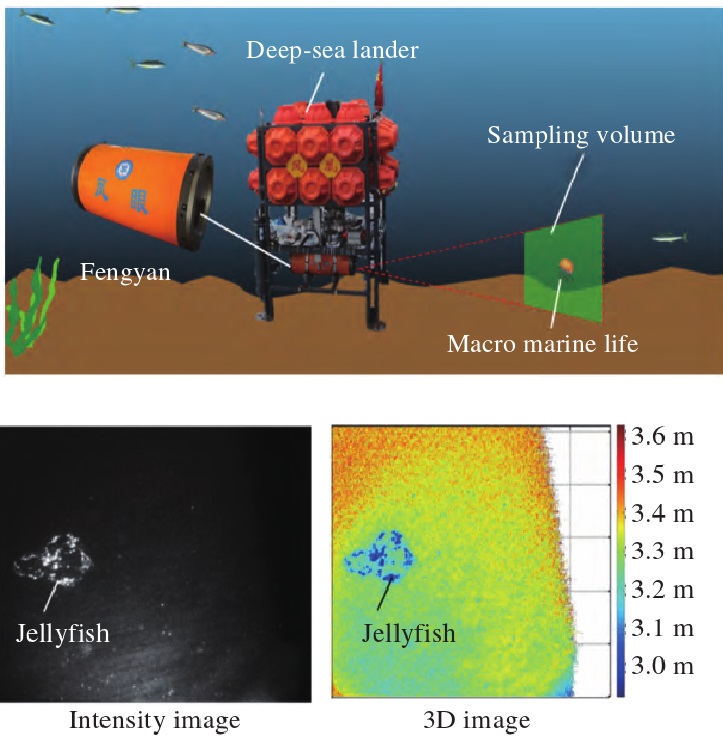
中国科学院半导体研究所研制的激光选通三维成像系统“凤眼”采用三角形距离能量相关方法可用于mm级到cm级海洋生物原位观测,并可基于三维图像实现生物尺寸测量等功能,2018年搭载“凤凰号”深海着陆器的“凤眼”在 1070 m水深下获得的水母强度图像和三维图像。
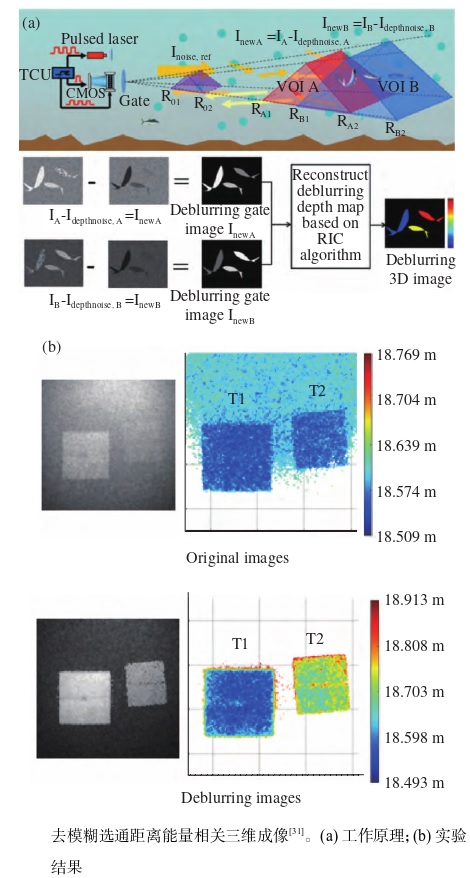
2020年王新伟提出了一种去模糊选通距离能量相关成像方法,对水下距离系统约18.5m,前后间隔15cm的两个平板靶进行了成像。
2022年孙磊采用抛物线拟合距离-能量相关性曲线,实现超分辨率三维成像。

2018年,在DENSE计划支持下,Gruber等人提出了一种基于3幅选通图像的多层感知机三维重建方法(属于基于深度学习的距离能量相关),2019年,进一步提出 了一种利用深度学习将选通图像转换为稠密的激光雷达图像的方法Gated2Depth;在2022年Amanpreet Walia等人提出了自监督的Gated2Gated方法,其特点是无需激光雷达数据,只需选通相机即可实现深度学习三维重建,无异源数据融合问题;2024年王新伟及其团队提出了一种基于卷积神经网络的距离能量包络引导的选通三维成像算法RIP-Gated3D,该方法可实现基于两幅选通图像端到端的生成高距离精度深度图像。
虽然我国在水下三维重建测量的研究开展略晚,且在商业化水下三维激光检测方面存在一定不足,但是在数据处理算法方面,国内许多机构和团队已经同步或领先世界水平。
距离选通激光水下成像的产品
经过几十年的发展,激光距离选通二维成像已有成熟产品,代表性的有加拿大OBZERV公司的Active Range-Gated Camera (ARGC)系列、北京中科盛视公司的Gated Laser Surveillance System (GLASS)系 列。在水下成像方面,激光距离选通二维成像技术也发展迅速。相比激光距离选通二维成像,激光距离选通三维成像仍未形成成熟产品,但是国内外都在积极攻关,相信不久的将来就会见到。
参考文献
便携式远距离激光选通成像系统研究_王书宇2018
基于C++的距离选通激光成像雷达系统软件设计_曲思锦2021
基于机器学习的激光距离选通成像目标识别算法研究_张文杰2022
基于激光距离选通成像的透火透烟侦察技术_李紫婷2023
基于距离选通激光成像技术的水下目标三维成像方法研究_黄子恒2016
基于多帧水下距离选通图像的三维重构方法_李海兰2010
基于抛物线包络反演的距离选通三维成像方法_孙磊2022
https://www.laserfair.com/news/201711/23/66186.html
基于线激光扫描的水下目标三维检测研究_国佳丽2023
激光距离选通成像的SLM同步扫描技术研究_黄裕2020
激光距离选通三维成像技术研究进展(特邀)_王新伟2024
激光距离选通三维成像中的超分辨率重建方法研究_魏洪朋2019
距离选通超分辨率三维成像及其应用_王新伟2016
距离选通成像系统中短脉冲激光驱动技术研究_王翀2023
距离选通激光主动成像同步控制技术研究_孟令南2018
距离选通切片图像高精度三维重构方法_官斌2017
水下激光探测系统实现关键技术_李攀2021
一种基于线结构光的水下目标3维信息测量方法_徐鹏飞2022
一种距离选通水下激光成像系统设计与实验研究_吕文磊2019
用于选通成像的半导体激光器列阵光束整形技术研究_张百顺2020
水下目标高分辨成像激光雷达研究_韩文杰 2020
https://www.sintef.no/en/projects/2015/utofia3/
基于多帧水下距离选通图像的三维重构方法_李海兰
这篇关于什么是距离选通型水下三维激光扫描仪?(下)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






