d435i专题
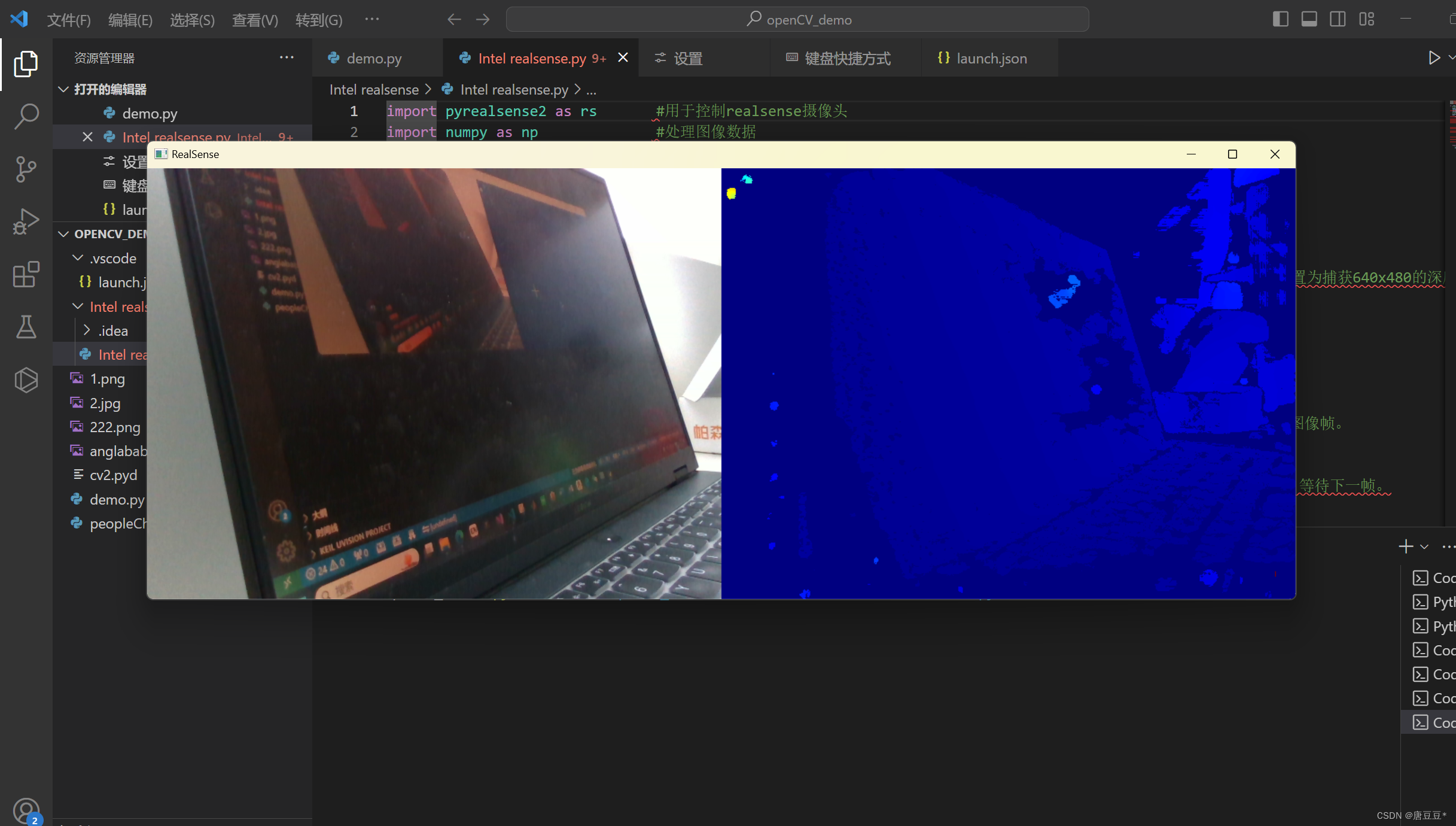
如何使用vsCode打开intel D435i深度相机
一、下载并安装相机SDK文件 1.SDK下载地址: Release Intel® RealSense™ SDK 2.0 (v2.54.2) · IntelRealSense/librealsense · GitHub 2.下载后,双击即可安装 3.环境配置 1)window的开始菜单,搜索环境变量,选择编辑系统环境变量 2)选择高级,选择环境变量 3)在系统变量里面,
intel RealSense D435i 摄像头在ubuntu18.04中的使用
1.前提: 1.已安装ubuntu18.04,能控制小乌龟。 2.已安装好nvidia驱动和合适版本的duda 3.根据教程写的,也可以直接看教程 2.教程文件 : 待上传 3.安装: 3.1桌面完整版安装: 包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3 D 感知,依次执行如下 5 条命令(可能已经安装过了,不要紧,避免漏网之鱼) sudo

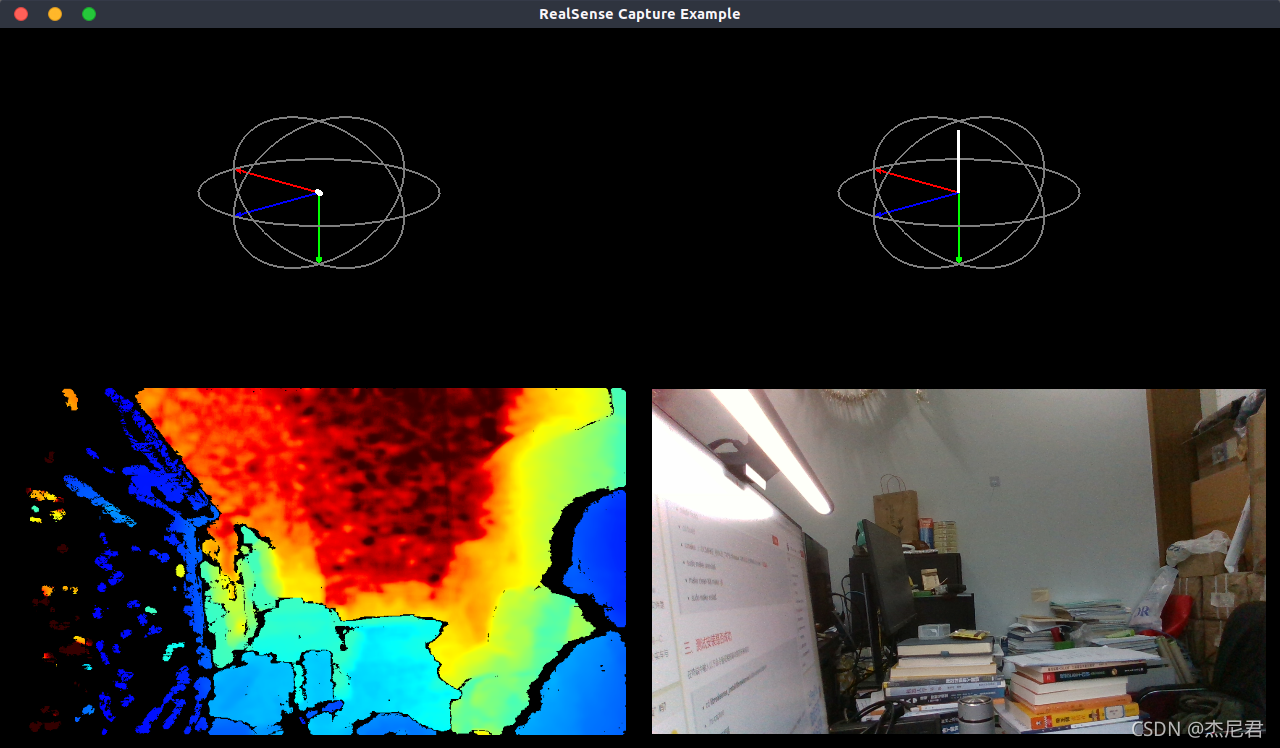
D435i发布的话题学习
参考自https://blog.csdn.net/sinat_16643223/article/details/136406602?spm=1001.2014.3001.5502 这里整理一下D435i庞大的topic话题数据。 根据算法来说的话,vins-fusion需要双目灰度图像的话题: camera/infra1/image_rect_raw 和camera/infra2/image_re
在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动
在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动 前言准备工作系统版本参考资料 操作步骤 前言 用了很长时间,参考了很多博客跟教程,博客大多需要重新刷jetpack3.2.1的固件,而我又不想重新刷固件。只好一个人慢慢搞,还好最终还是在TX2上成功的安装了D435i的驱动,开心~ 由于Jetpack4.2固件默

【ORB-SLAM3】在 Ubuntu20.04 上编译 ORM-SLAM3 并使用 D435i 运行测试
【ORB-SLAM3】在 Ubuntu20.04 上编译 ORM-SLAM3 并使用 D435i 运行测试 1 Prerequisites1.1 C++11 or C++0x Compiler1.2 Pangolin1.3 OpenCV1.4 Eigen3 2 安装 Intel® RealSense™ SDK 2.02.1 测试设备2.2 编译源码安装 (Recommend)2.3 预编译包
【ROS进阶】Intel RealSence D435i在ros系统中启动
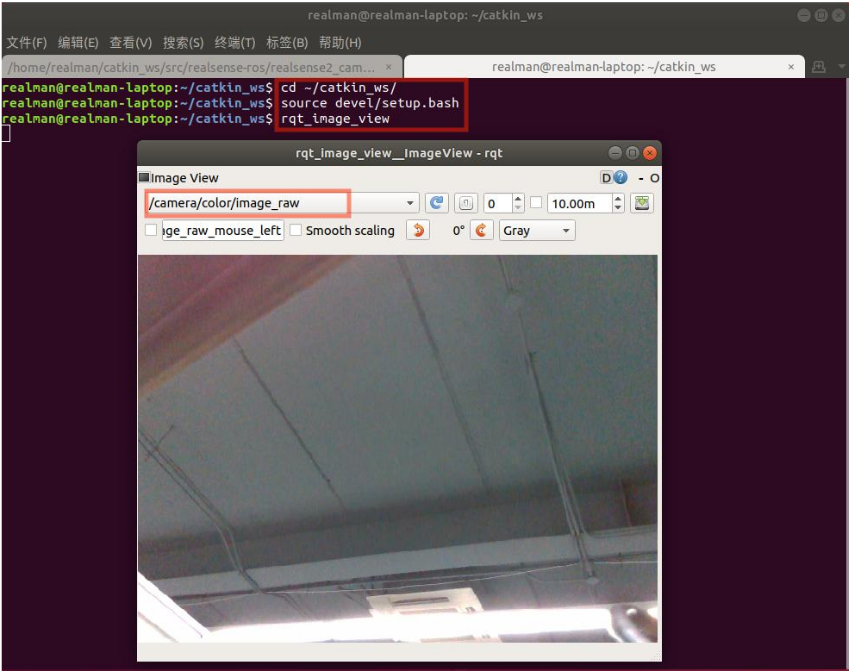
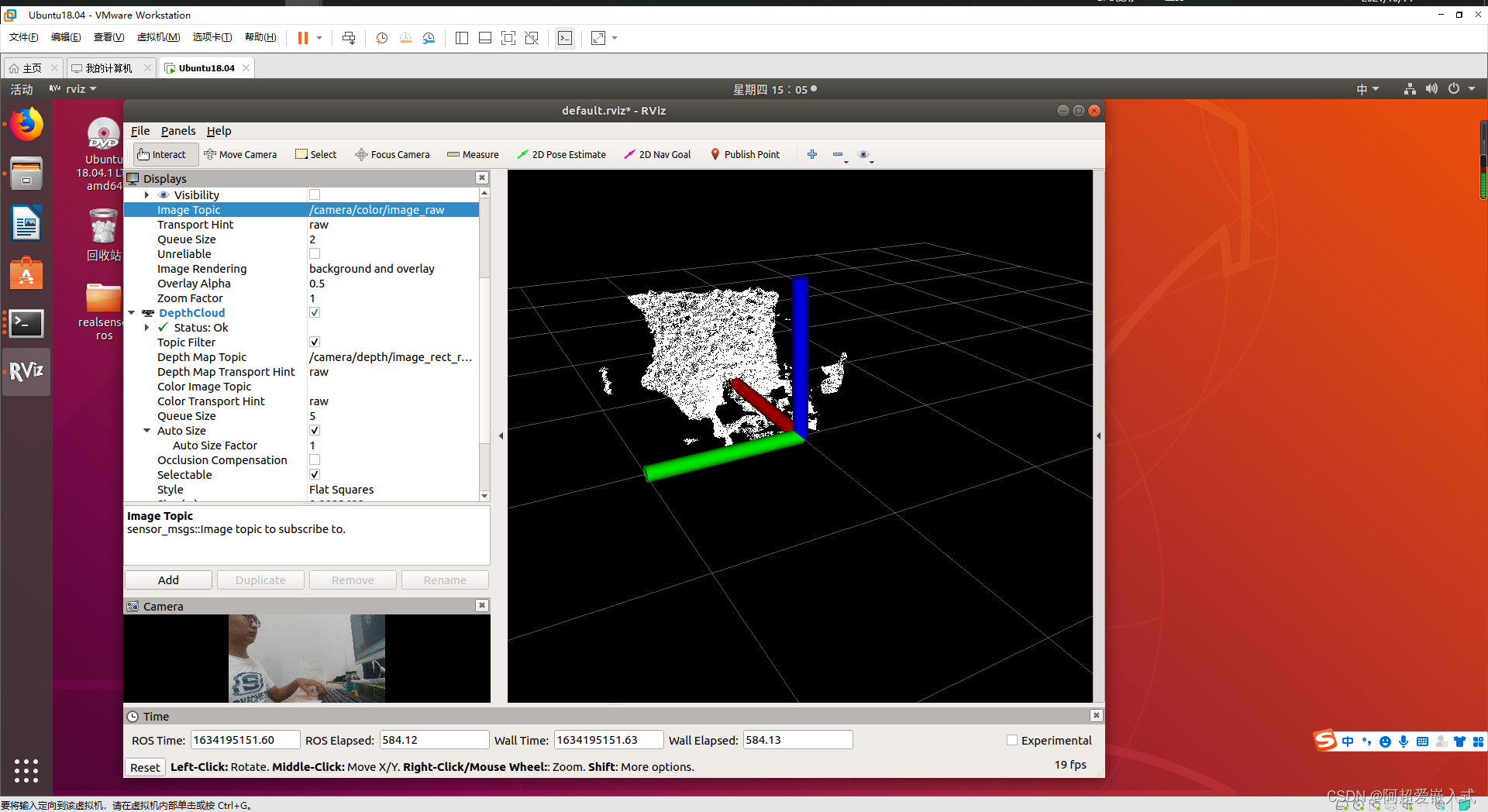
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉 📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处 文章目录 前言一、环境配置二、注意事项三、启动相机3.1 连接相机3.2显示rviz 四、
英伟达 Jetson TX2 开发板安装英特尔 D435i 深度相机驱动
经过多番折腾,成功安装并且掌握了规律,在这里详细解释一下,大家可以依葫芦画瓢。授人以鱼不如授人以渔。 首先,也是最最最重要的一步,就是要重新编译系统内核,使得内核可以识别 D435i 相机。因为 D435i 是采用 USB3.0 接口与 TX2 连接的,USB 能否识别设备取决于内核中是否有对应于设备 ID 的预置代码,在内核编译的时候,需要打补丁,将 D435i 的 USB 信息添加到内

【无人机自主导航7 SLAM】大疆Manifold2C平台及Intel Realsense D435i RGB-D相机实现ORB-SLAM3
转载自:https://blog.csdn.net/weixin_42646103/article/details/115678880?spm=1001.2014.3001.5501 【无人机自主导航7 SLAM】大疆Manifold2C平台及Intel Realsense D435i RGB-D相机实现ORB-SLAM3 分类专栏: 无人机 学习分享笔记 文章标签: linux 无人

使用D435i的一些奇怪的现象
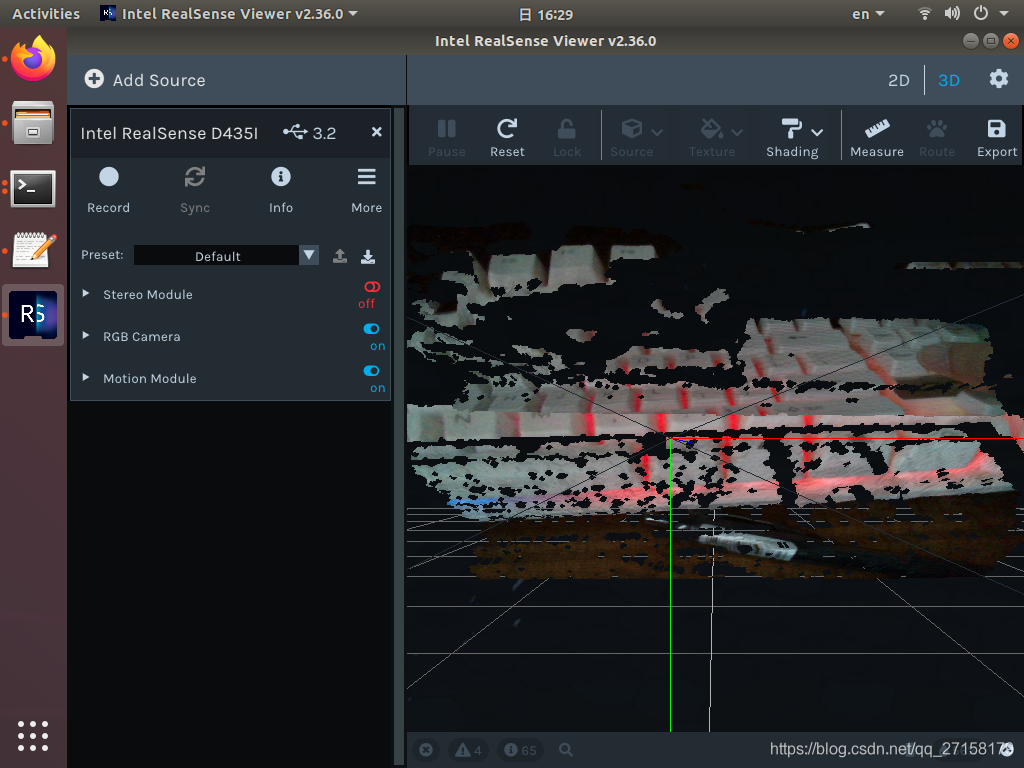
使用D435i的一些奇怪的现象 装好librealsense之后打开realsense-viewer检测不到D435i或者T265,但是装好sudo apt-get install ros-melodic-realsense2-camera 再roslaunch都正常,图像话题都有。 这种情况一次是我之前在树莓派上,一次是今天在NUC上。 roslaunch realsense2_
使用D435i的一些奇怪的现象
使用D435i的一些奇怪的现象 装好librealsense之后打开realsense-viewer检测不到D435i或者T265,但是装好sudo apt-get install ros-melodic-realsense2-camera 再roslaunch都正常,图像话题都有。 这种情况一次是我之前在树莓派上,一次是今天在NUC上。 roslaunch realsense2_

实测 (二)NVIDIA Xavier NX + D435i / 奥比中光Astrapro 相机+ ORB-SLAM 2 + 3 稠密回环建图
开发环境:NX+Ubuntu18.04+ROS-melodic 接着上篇,开始orb-slam2稠密回环建图 二、NX + D435i + ORB-SLAM2 稠密回环建图 先上效果图 这里感谢大神提供一个可回环的稠密地图版本: https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP.git 2.1 安装依赖(和orb-s
1、 D435i ----- Ubuntu18.04下D435i使用(SDK安装与测试)
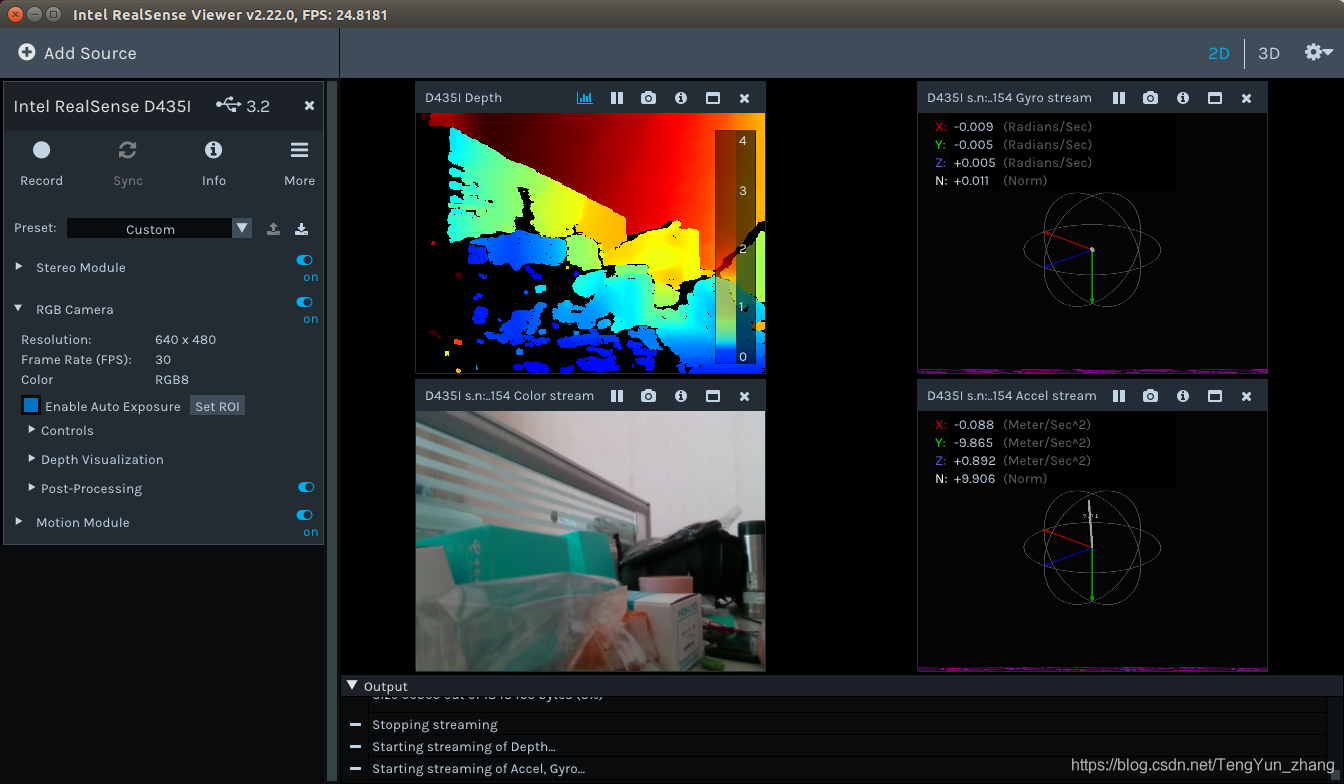
D435i相关测试使用 1. Intel RealSense SDK 2.0的安装1.1 注册服务器公钥1.2 添加服务器到本机repository1.3 安装库文件1.4 安装developer和debug的包(Optional but Recommended) 2. RealSense SDK相关程序开发文件安装2.1 更新系统2.2 下载相关的程序文件包2.2.1 下载相关的程序包文件
ubuntu18上手intel d435i双目摄像头
intel d435i驱动暂时不支持ubuntu20,因为内核版本是5.4太高了。 ubuntu 18.04: https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md *********************Prerequisites 1. Make Ubuntu Up-to-date: s

BundleFusion在win10环境下使用Realsense D435i相机实现室内实时稠密三维重建
BundleFusion在win10环境下使用RealSense D435i相机实现室内实时稠密三维重建 网上很多教程说明必须在使用vs2013+cuda8.0才能配置成功,经过本人研究在vs2013和vs2019环境下均能配置成功。同时在配置中有一个中重要的发现,RTX显卡和GTX显卡环境配置中存在差异,RTX显卡下生成的FriedLiver.exe存在无响应问题,具体解决办法如下。 1、配

InterRealSense D435i 相机驱动安装与配置
文章目录 简介SDK2.0安装软件源安装安装步骤: 手动安装(推荐)安装步骤:1. 本地更新2. 准备 Linux 后端和开发环境:3. 构建librealsense2 SDK 注意事项后续 简介 InterRealSense D435i是Inter公司RealSense系列摄像头的其中一种,该系列采用英特尔最新的深度感应硬件和软件,封装成易于集成的产品中。相比于D43

【手眼标定】ros/easy_handeye+ur5e+realsense D435i(eye on/to hand)
前言 此前有尝试过使用Matlab Tsai原理标定珞石工业机械臂,效果不是很好,也没有找到原因在哪里。终于来了北京实验室可以用UR5e在ROS框架下使用easy_handeye标定了,十分简洁哈哈哈哈哈 提示:以下是内容严重参考链接:https://zhuanlan.zhihu.com/p/92339362 十分感谢前人大佬的分享 0. 手眼标定原理 参考大佬深入浅出的解释 重点:

Jetson nx(Jetpack4.6版本)保姆级教程安装安装d435i-SDK流程踩坑,以及安装realsense与code_utils与imu_utils并标定imu内参附上测试demo
不知道啥时候自己能买得起这个相机,拍照留个纪念。 NVIDIA Jetson installation (intelrealsense.com) 固件跟新地址Firmware Update Tool (rs-fw-update) (intelrealsense.com) 安装IntelRealsense D435i驱动,注意该过程中不能接入摄像头:git clone https://
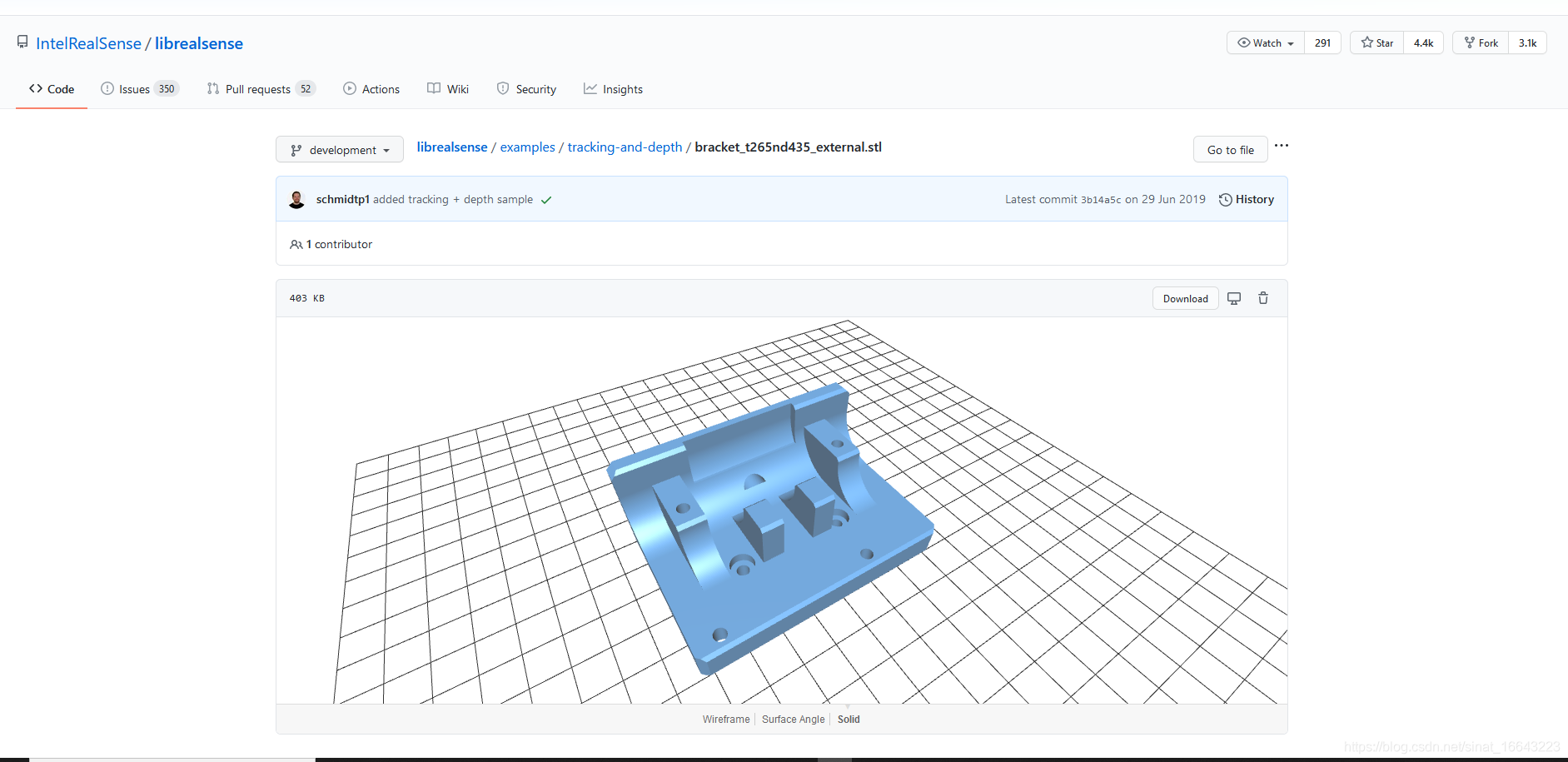
T265和D435i固定件3D打印模型(realsense官方提供的)
T265和D435i固定件3D打印模型(realsense官方提供的) 我也上传到我的百度网盘里了 最开始是在阿木的普罗米修斯项目看到的 https://github.com/amov-lab/Prometheus/wiki/D435i+T265%E5%BB%BA%E5%9B%BE https://github.com/IntelRealSense/librealsense/blo

项目设计:YOLOv5目标检测+机构光相机(intel d455和d435i)测距
1.介绍 1.1 Intel D455 Intel D455 是一款基于结构光(Structured Light)技术的深度相机。 与ToF相机不同,结构光相机使用另一种方法来获取物体的深度信息。它通过投射可视光谱中的红外结构光图案,然后从被拍摄物体表面反射回来的图案重建出其三维形状和深度信息。 Intel D455 深度相机采用了结构光技术,能够获取高精度、高分辨率的深度图像和点云数据