本文主要是介绍intel RealSense D435i 摄像头在ubuntu18.04中的使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.前提:
1.已安装ubuntu18.04,能控制小乌龟。
2.已安装好nvidia驱动和合适版本的duda
3.根据教程写的,也可以直接看教程
2.教程文件 :
待上传
3.安装:
3.1桌面完整版安装:
包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3 D
感知,依次执行如下 5 条命令(可能已经安装过了,不要紧,避免漏网之鱼)
sudo apt install libvtk6-jni libvtk6-java libvtk6-dev libvtk6-qt-dev libpcl-dev
sudo apt install ros-melodic-pcl-conversions ros-melodic-perception ros-melodic-rqt ros-melodic-pcl-ros ros-melodic-perception-pcl
sudo apt install ros-melodic-desktop-full
sudo apt install python-rosdep
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential ros-melodic-catkinpip 包管理工具安装:
sudo apt install python3-dev python3-pip python-pip python-devcatkin_tools 安装:(没安装成功,好像没什么影响)
sudo pip3 install -U catkin_tools3.2 安装 MoveIt!
MoveIt!需要安装才能使用,如果未安装,请执行如下命令进行安装。
sudo apt install ros-melodic-moveit
sudo apt install ros-melodic-moveit-*3.3安装 OpenCV
sudo apt-get install ros-melodic-vision-opencv libopencv-dev python-opencv4. Realsense D435 相机 SDK 及 ROS 包安装
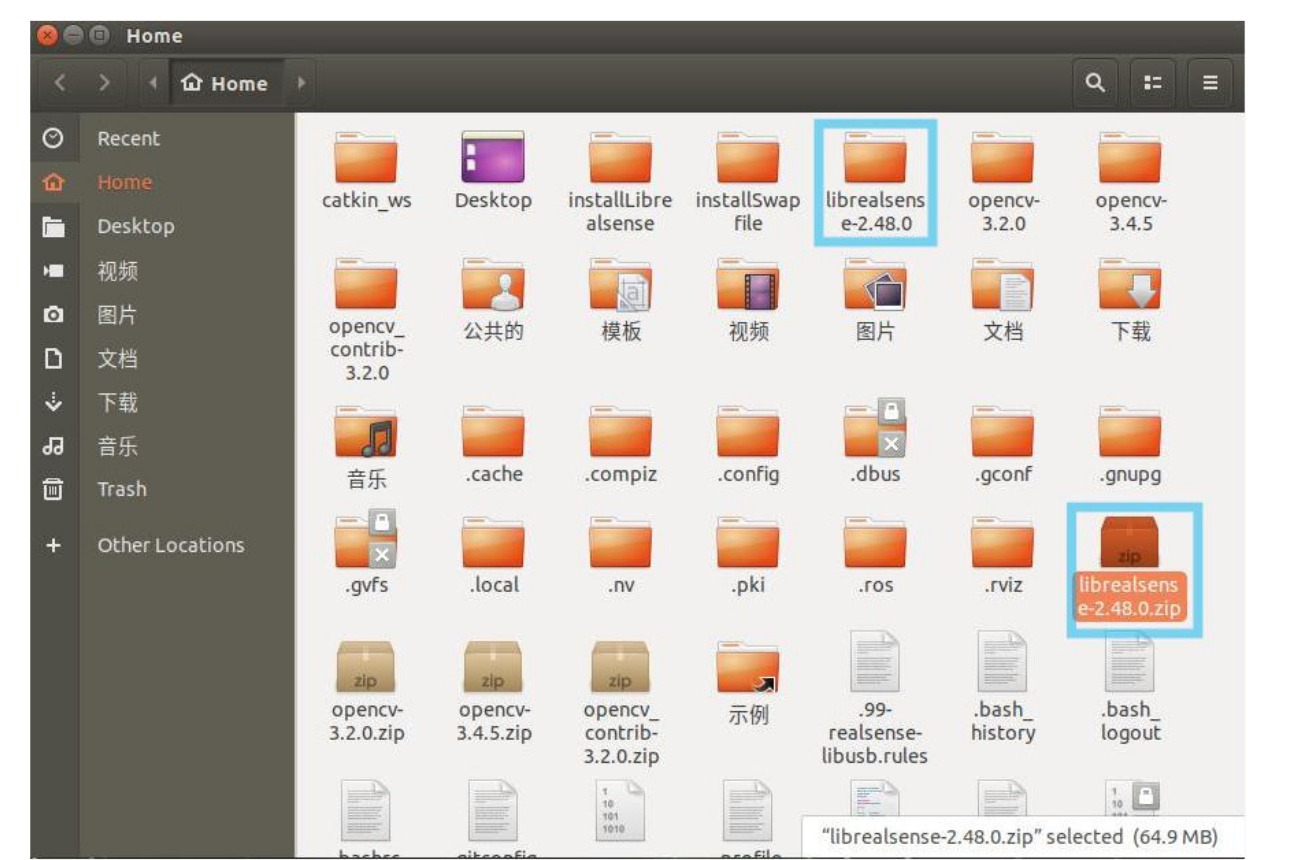
拷贝 Realsense SDK 源码到用户主目录
将提供的源码压缩包 librealsense-2.48.0.zip 拷贝到用户主目录下并解压:
4.1安装依赖
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev先拔掉相机的 USB 线
4.2 执行权限设置,建立别名
cd ~/librealsense-2.48.0
./scripts/setup_udev_rules.sh4.3 增加模块
echo 'hid_sensor_custom' | sudo tee -a /etc/modules4.4 添加变量到环境(看一下自己的cuda版本)
export CUDA_HOME=/usr/local/cuda-10.2
export PATH=/usr/local/cuda-10.2/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64:$LD_LIBRARY_PATH把10.2换成你的版本,比如我的就是12.1
4.5 编译安装(编译安装时间较长)(好像需要vpn)(多试几次)
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true -DBUILD_WITH_CUDA=true
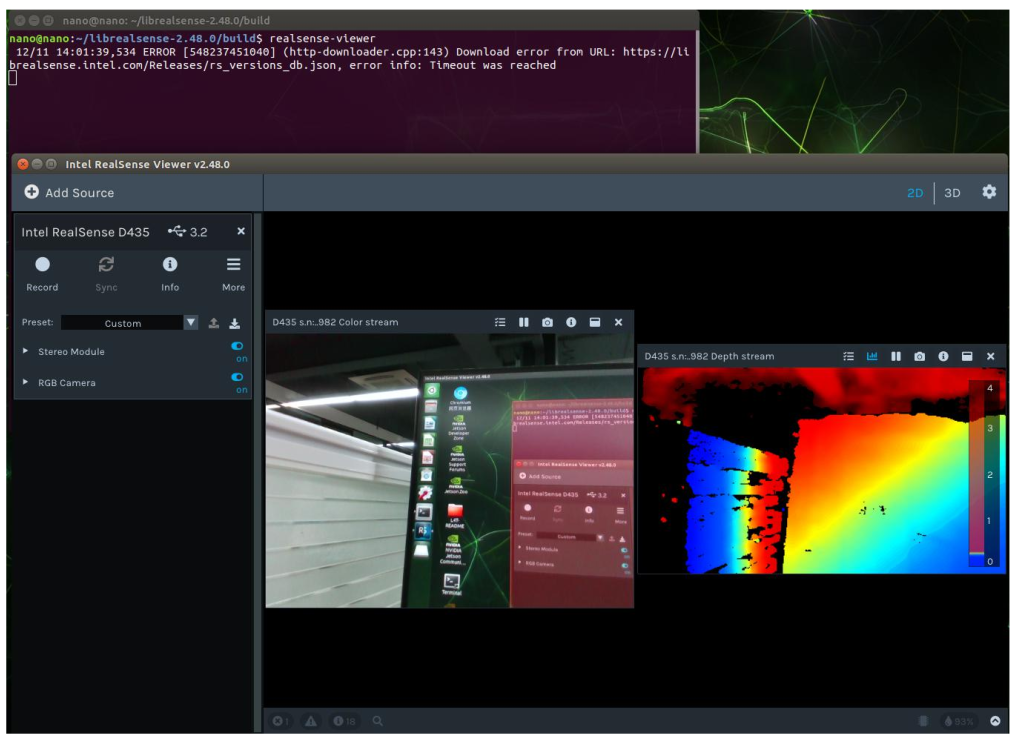
sudo make uninstall && make clean && make && sudo make install4.6 编译安装成功后,将相机连接到 Nano 上然后执行命令:
realsense-viewer如下图能够查看到图像,说明安装成功。
5. realsense-ros 功能包编译
建议新建一个工作空间,这样可以避免影响,但是记住要source了工作空间的环境变量。
进入工作空间的 src 目录下,如果没有工作空间,执行以下命令创建工作空间:
mkdir -p ~/catkin_ws/src && cd ~/catkin_ws/src 执行以下命令下载源码并安装依赖库(如果下载连接超时,可以将已下载提供的源码包
解压并拷贝到~/catkin_ws/src 下,如果是拷贝的就不需要执行 git checkout 2.3.1 命令):
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/realsense2_camera
#git checkout 2.3.1
sudo apt-get install ros-melodic-ddynamic-reconfigure建立 opencv4 的软链接
sudo ln -s /usr/include/opencv4 /usr/include/opencv编译前先创建交换空间,避免编译时内存不足造成卡死,依次执行以下命令:
sudo dd if=/dev/zero of=/swapfile bs=64M count=32
sudo mkswap /swapfile
sudo chmod 0600 /swapfile
sudo swapon /swapfile执行以下命令编译完成后即可完成功能包的安装:
我catkin build这句报错,可能跟前面没下载成功有关,我直接catkin make realsense2_camera也成功了
cd ~/catkin_ws
catkin build realsense2_camera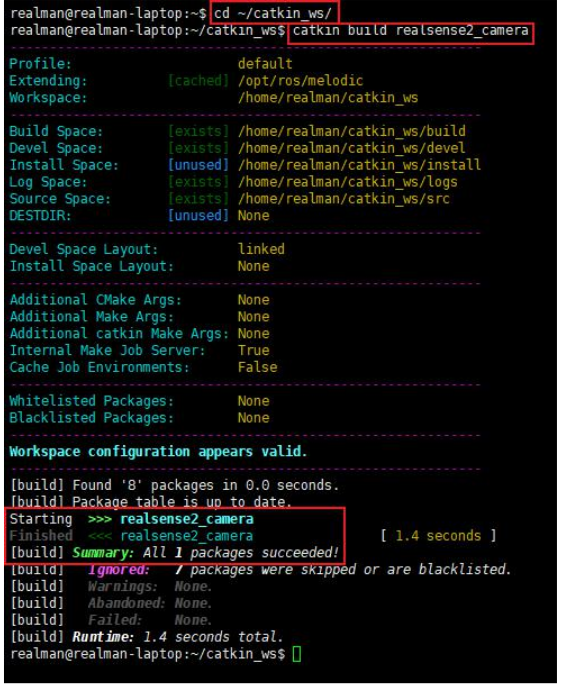
启动节点测试
cd ~/catkin_ws
source devel/setup.bash
roslaunch realsense2_camera rs_camera.launch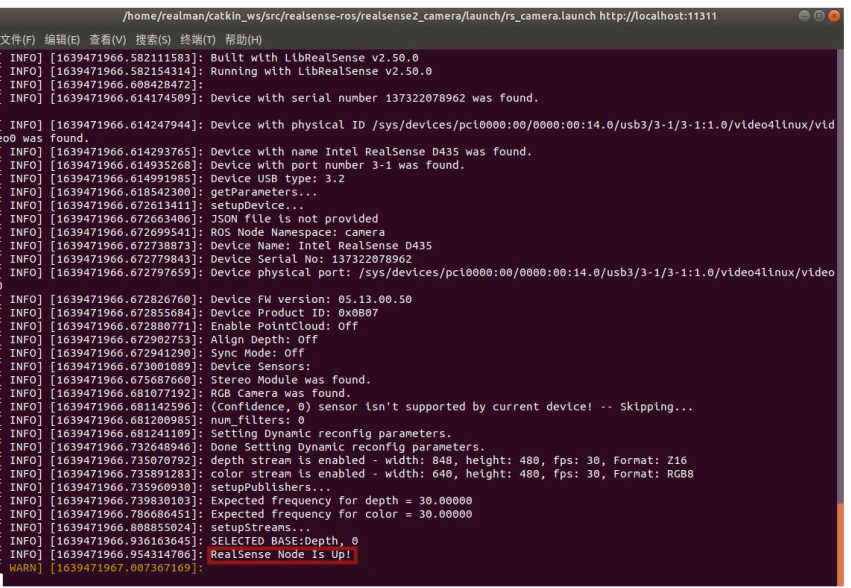
打开一个新的终端,输入如下命令查看 topic 发布的图像:
rqt_image_view 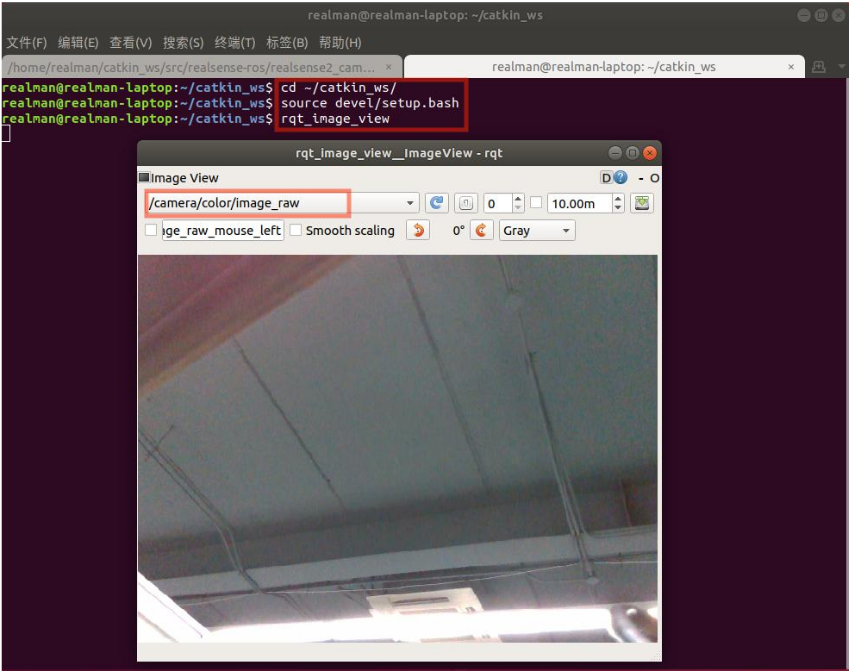
这篇关于intel RealSense D435i 摄像头在ubuntu18.04中的使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






