本文主要是介绍在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动
- 前言
- 准备工作
- 系统版本
- 参考资料
- 操作步骤
前言
用了很长时间,参考了很多博客跟教程,博客大多需要重新刷jetpack3.2.1的固件,而我又不想重新刷固件。只好一个人慢慢搞,还好最终还是在TX2上成功的安装了D435i的驱动,开心~
由于Jetpack4.2固件默认的是4.9.140版本的内核,librealsense又不支持4.9版本的内核,所以要对补丁文件做一些调整。下面将详细说明具体操作步骤。
注意:我是在TX2上安装的,其他硬件平台仅供参考。
版权所有,转载请注明出处
准备工作
系统版本
- TX2上刷的Jetpack4.2固件
- ubuntu18.04
- linux内核版本kernel4.9.140可用
uname -r查看内核版本 - SDK版本 librealsense v2.22.0
- L4T32.1
参考资料
https://www.jetsonhacks.com/2019/01/21/intel-realsense-d435i-on-nvidia-jetson-agx-xavier/ //我主要是改的这个教程里的脚本和补丁文件
https://github.com/alexrashed/buildJetsonTX2Kernel (kernel4.9.140版本的编译内核源码方法)
https://github.com/IntelRealSense/librealsense (librealsense SDK下载地址)
https://github.com/Tengyun-Mo/buildLibrealsense2TX2 (更改后的脚本跟补丁文件)
注意:如果你的L4T 版本或SDK不是上面的版本,需要你改buildPatchedKernel.sh下相应的命令,改成你自己的版本。
操作步骤
1.新开一个终端,在用户目录下下载安装D435i驱动的脚本
cd ~git clone https://github.com/Tengyun-Mo/buildLibrealsense2TX2.git
2.进入文件目录
cd ~/buildLibrealsense2TX2
3.运行给内核打补丁的脚本
./buildPatchedKernel.sh
运行完这个脚本后会在~/buildLibrealsense2TX2/image文件夹下生成一个Image文件
4.覆盖TX2上的Image文件
注意:覆盖Image文件前将原Image文件备份一下
sudo cp ./image/Image /boot
注意:需确保的确覆盖了TX2上的Image文件,一般TX2上Image文件路径为/boot
5.删除内核源码及编译后生成的文件
./removeAllKernelSources.sh
6.重启
reboot
7.安装librealsense2(在buildLbrealsense2TX2文件目录下运行下面的脚本)
./installLibrealsense.sh
注意:安装SDK时需要拔下D435i摄像头
目前,realsense-viewer应用程序存在问题。 第一个问题是,使用分辨率较高的RGB图像时,会收到不完整的帧。 这是一个library wide的问题,并不仅仅限于realsense-viewer应用。 第二个问题是其中一个进程往往会在realsense-viewer应用程序中阻塞。 这里提供了两个补丁,通过运行下面的脚本来使用这两个补丁:
./patchApplication.sh
8.插上摄像头,新开一个终端,输入
realsense-viewer
你会看到
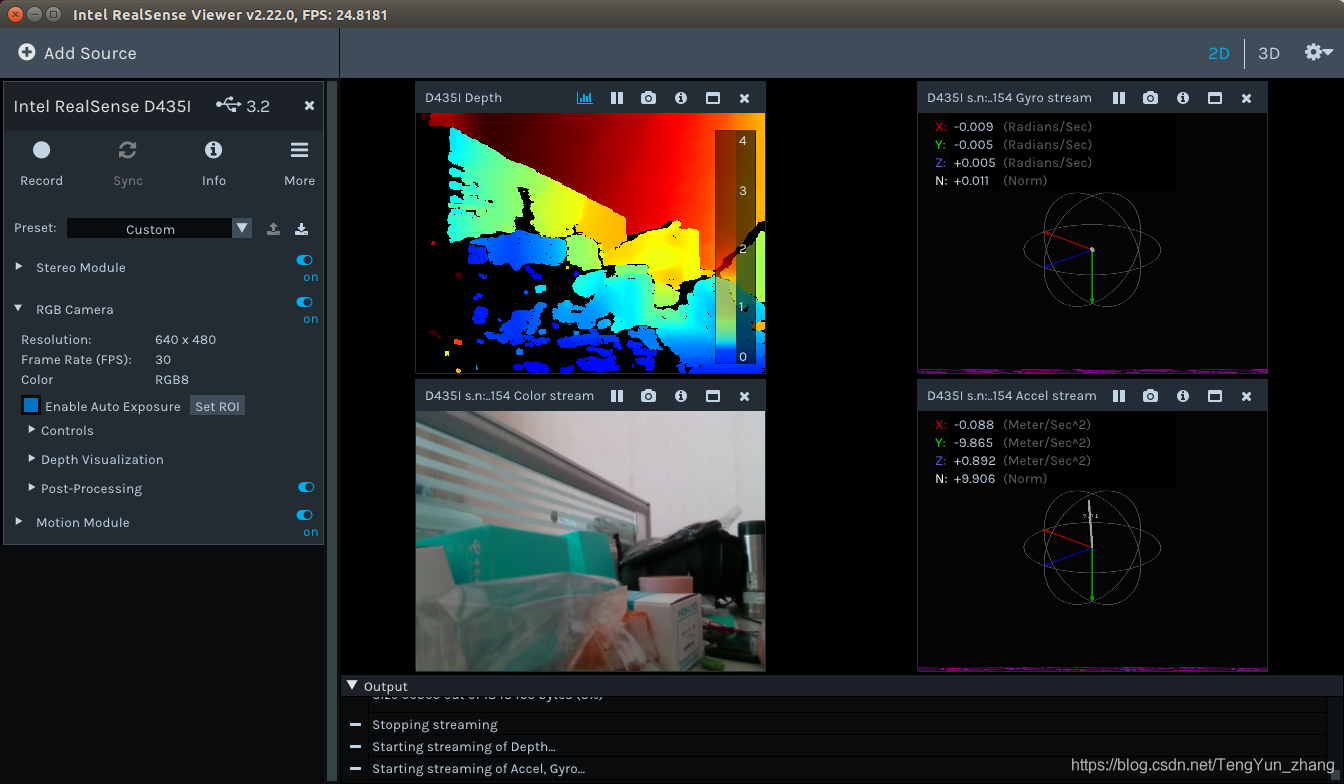
驱动安装成功,可以使用D435i了!
这篇关于在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









