tx2专题

TX2安装pip工具
在TX2上安装pip可使用以下命令: sudo apt install python-pip 但是使用该命令在安装过程中,大概率会出现问题,在下载文件过程中,有的网络不好引起的,有的权限问题,还有些其他的问题。所以安装pip最保险的方式是将下载好的pip包直接拷贝进行安装。 pip安装包下载链接:链接: https://pan.baidu.com/s/13dCx3ZK8i_QyH4RkrG6

TX2板子opencv安装
在TX2板子上安装opencv有两种方式,一种是你使用cmake直接在TX2上编译源码,第二种是使用你已编译好的opencv在TX2上进行配置,第二种方式需要注意你编译的版本也是在ARM平台编译的才能生效。 第一种方式可见我之前的博文《Linux下使用cmake编译opencv库》。本文主要介绍第二种方式,编译opencv比较耗时,有时候直接使用已编译好的版本进行配置省很多时间。 注:本文的配

TX2上darknet框架编译问题梳理
darknet源码下载:https://github.com/pjreddie/darknet 1. 编译设置 打开darknet的源码根目录,里面有Makefile文件,根据需要编译相关模块: darknet的opencv模块采用了1.x版本的IplImage数据类型以及有许多1.x版本的API接口,该类型以及相关的接口在opencv4+版本中已被弃用。因此编译opencv时需注意,D

TX2 关闭console serial使用该串口
由于项目变更,GPU型号从Tx1变成Tx2,原来的硬件接口没有变,但是把原来UART0的console serial功能关闭变成一个串口使用的方法没法使用了。这就导致了数据通过该串口发送的数据变的很有问题,无法使用了。 经过测试,终于找到了解决的方法。 首先在虚拟机上,安装编辑设备树的软件: $sudo apt-get update $sudo apt-get install device
【ai】tx2-nx 查看 jetpack 版本信息及对应的tritonserver
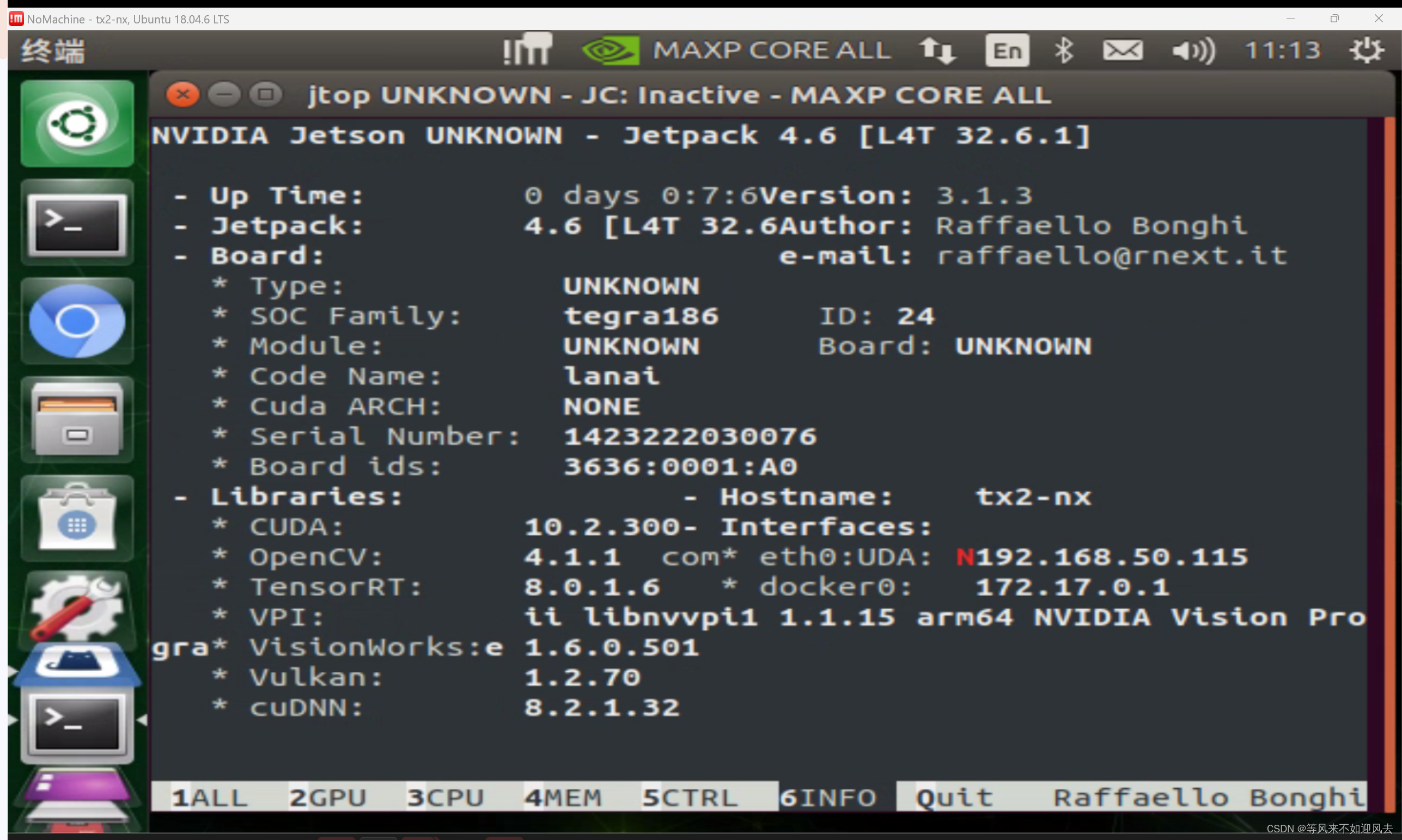
3 jtop nvidia@tx2-nx:~$ jtop[WARN] Board missing UNKNOWN (press CTRL + Click)nvidia@tx2-nx:~$ 点击info 可以看到 jetpack是4.6opencv 是4.1.1 5.1.2 的不适合我 tritonserver2.35.0-jetpack5.1.2-update-2.tgz
【ai】tx2-nx:搭配torch的torchvision
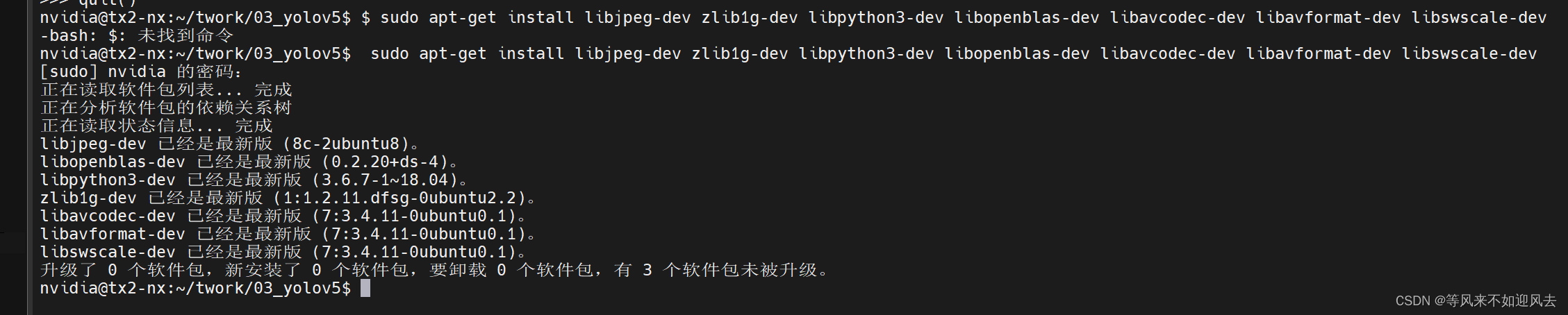
微雪的教程 pytorch_version 1.10.0 官方教程安装torch 官方教程 依赖项 nvidia@tx2-nx:~/twork/03_yolov5$ $ sudo apt-get install libjpeg-dev zlib1g-dev lib

【ai】tx2-nx 开通samba
ubutn服务器加入了samba给jetson也加入一个 samba 添加root用户 密码与nvidia一样 添加nvidia 到suoders中并添加samba账号 nvidia@tx2-nx:~$nvidia@tx2-nx:~$nvidia@tx2-nx:~$nvidia@tx2-nx:~$ sudo vi /etc/sudoersnvidia@tx2-n

【tx2】——动态库编译注意事项
1. 在ubuntu上编译成库,然后把库so直接copy到tx2用于编译 可能问题: ubuntu上编译的库在tx2上(arm平台上)能否直接使用? 结果: /usr/bin/ld: skipping incompatible /home/ginger/chenjun/libs_make/lib/libmegengine.so when searching for -lmegengine
jetson tx2 nx实现在ros1中yolov5实现
亲测用以下链接实现功能。 安装ros。Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)_ubuntu 18 ros melodic-CSDN博客文章浏览阅读10w+次,点赞835次,收藏3.8k次。这也是我在ubuntu里面安装ROS的第N次,为了避免自己以后出现问题再安装时,所以写这篇博客总结一下,这次是我安装最快,问题最少也最好解决的一次,在网上看了
【TX2】英伟达Nvidia TX2连接蓝牙设备
1、问题描述 买了一个蓝牙键盘(航世B.O.W 折叠键盘HB099,200大洋),尝试在连接TX2的蓝牙,试试好使不 2、安装蓝牙 Blueman 是一个适合在 GNOME 桌面环境使用的图形化蓝牙管理工具。 sudo apt-get install blueman bluez*vi /etc/bluetooth/main.conf//去掉行[Policy]和AutoEnable前的注

【TX2】TX2开发板系统默认串口有ttyS0(调试口)、ttyTHS1、ttyTHS2、ttyTHS3,通过修改设备树文件,可以新增三个串口
1、简述 TX2开发板系统默认串口有ttyS0(调试口)、ttyTHS1、ttyTHS2、ttyTHS3,通过修改设备树文件,可以新增三个串口。 2、设备树 设备树中关于串口部分的描述 2.1 基础配置 注意:在这里状态都配置成禁止(status = “disabled”;) 在设备树描述文件tegra186-quill-common.dtsi中,根据需要配置成使能(status = “

【EdgeBox-8120AI-TX2】Ubuntu18.04 + ROS_ Melodic + 星秒PAVO2单线激光 雷达评测
大家好,我是虎哥,好久不见,最近这断时间出现了一点变故,开始自己创业,很多事需要忙,所以停更了大约大半年,最近一切已经理顺,所以我还是抽空继续我之前的FLAG,CSDN突破十万粉丝计划。 前段时间,我们又开始开发2D激光雷达方案,听说了这款行业天花板的单线激光雷达,所以买到手的第一时间,就开始了评测。总结一下自己的简单测试经验,分享给大家,也是自己做个记录。

k3s部署Tx2集群
参考: http://dockone.io/article/9384 准备工作 假定下载到的文件已经上传到服务器节点的~/packages目录下面。 将k3s-amd64二进制文件放置到/usr/local/bin目录下,并赋予可执行权限: # cp ~/packages/k3s-amd64 /usr/local/bin/ # chmod +x /usr/local/bin/k3s-am

《嵌入式》NVIDIA Jetson TX2开发笔记 - 第3章 NVIDIA Jetson TX2优化配置
3.1网络连接 前1章,笔者带领大家成功进入TX2开发板的系统中,在正式开发之前,首先要配置的就是网络,开发板是有WiFi和千兆以太网口,当然为了方面,笔者使用的的是WiFi。 打开WiFi连接的图片,找到可用的WiFi,点击WiFi名。 图1 图2 输入密码,连接即可。网络连接好了,接下来就开启学习之旅吧。 NVIDIA Jetson TK2默认是没有浏览器的,在Ubu

TX2(RTSO-9002)环境配置(ROS,mavros,arduino,ttyACM,串口)
TX2 环境配置 1、TX2 ubuntu16.04换源 备份文件: sudo cp /etc/apt/sources.list /etc/apt/sources_init.list 打开文件: /etc/apt/sources.list 将该文件的内容替换成如下内容: deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-po
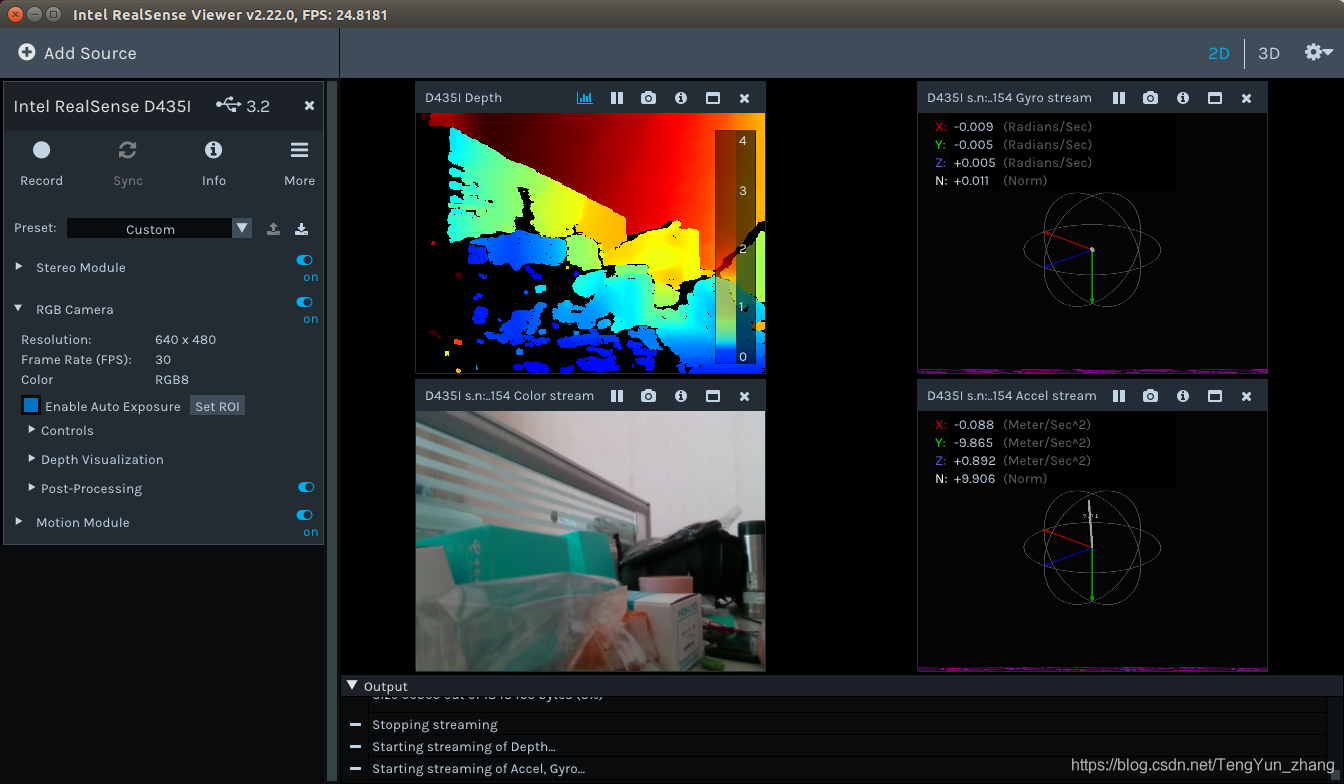
在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动
在TX2(Jetpack4.2+kernel4.9.140+librealsense v2.22)上安装D435i驱动 前言准备工作系统版本参考资料 操作步骤 前言 用了很长时间,参考了很多博客跟教程,博客大多需要重新刷jetpack3.2.1的固件,而我又不想重新刷固件。只好一个人慢慢搞,还好最终还是在TX2上成功的安装了D435i的驱动,开心~ 由于Jetpack4.2固件默

TX2 ubuntu18.04 改固定IP地址 eth0无本机IP
注意事项 我是在TX2 ubuntu18.04上改的固定IP地址,其他主机上ubuntu18.04好像需要另一种方法,需要你自己去百度上搜 参考博客 https://blog.csdn.net/a13662080711/article/details/80906918 操作步骤 打开一个终端,在终端中输入 sudo vim /etc/network/interfaces 新开一个终

TX2跑YOLOv4代码所需硬件配置
一、尝试安装pycharm所需步骤 安装JDK (1)在https://www.oracle.com/java/technologies/javase/javase-jdk8-downloads.html, 用户名:qq邮箱 密码:数字+大写字母+小写字母(自己记忆) (2)在安装包所在目录下打开终端 将文件解压到指定地方 sudo mkdir /usr/lib/jvmsudo tar

nvidia TX2 使用 SDK Manager工具刷机记录
本文为使用 nvidia 提供的 SDK Manager(本文称 sdkmanager) 工具下载、烧写 TX2 的记录。本文根据笔者长时间的摸索经历,以有限的经验对刷机过程及要点进行描述,由于历时较长,本文所述步骤不保证是完完全全的实际操作顺序,仅供参考。 本文不涉及 TX2 特性或功能或深度学习方面内容。 笔者仅以本文作记录,由于能力有限,对本文涉及的问题无法回答。 一、要点 一些基础要点或

EC20、RM500Q在TX2上或其他设备上模块识别不到
首先本人使用的是minipcie接口,RM500Q也是转成minipcie接口接入设备的,然后运行命令lsusb,看不到这些模块。曾尝试在两个设备上移植过EC20和RM500都遇到同样的问题,现已经都解决,如果你也遇到同样的问题,可以根据我讲解的原理,进行代码的修改。 不能识别的主要原因 主要是模块上的22号PERST#引脚需要进行复位,一开始是高电平,然后给与大于150ms的低电平,然后

Jetson TX2 使用jetpack4.2刷机(亲自测试踩坑)
@Jetson TX2 使用jetpack4.2刷机(亲自测试踩坑解决) 转载好文章(注:准备工作一定先做好,不然报一大堆错误,结合本文章无忧) https://blog.csdn.net/weixin_43590290/article/details/102481376 刷机中遇见的error以及解决方案(针对jetpack4.2) 一:帐号密码正确,出现帐号密码验证失败 1:点击sd

tx2开发板升级JetPack至最新
最近一个项目用到了tx2, 上面的jetpack太老了需要更新,很久没和开发板打交道了,记录一下。中间没怎么截图,所以可能文字居多。 准备工作 Ubuntu 18.04的机器,避免有坑,不要使用虚拟机,一定要是物理机,我就是刚开始用虚拟机,每次到99%,就卡住TX2开发板网线,tx2 USB连接线 SDK manager安装 SDK Manager | NVIDIA Developer 根
英伟达 Jetson TX2 开发板安装Xsens MTi 驱动
TX2 的 ubuntu 18.04 不能自动将 MTi 的 USB 口识别成串口,必须编译内核模块作为驱动程序。 第一步,下载内核源码到 TX2 的 /usr/src 文件夹 内核源码的下载链接在英伟达官网,对照自己的系统版本来下载就可以,例如 R32.2.3 。 下载后的文件名称为 public_sources.tbz2 , 经过两次解压后才是源代码,相关指令包括: cd /usr/s
英伟达 Jetson TX2 开发板安装英特尔 D435i 深度相机驱动
经过多番折腾,成功安装并且掌握了规律,在这里详细解释一下,大家可以依葫芦画瓢。授人以鱼不如授人以渔。 首先,也是最最最重要的一步,就是要重新编译系统内核,使得内核可以识别 D435i 相机。因为 D435i 是采用 USB3.0 接口与 TX2 连接的,USB 能否识别设备取决于内核中是否有对应于设备 ID 的预置代码,在内核编译的时候,需要打补丁,将 D435i 的 USB 信息添加到内