本文主要是介绍1、 D435i ----- Ubuntu18.04下D435i使用(SDK安装与测试),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
D435i相关测试使用
- 1. Intel RealSense SDK 2.0的安装
- 1.1 注册服务器公钥
- 1.2 添加服务器到本机repository
- 1.3 安装库文件
- 1.4 安装developer和debug的包(Optional but Recommended)
- 2. RealSense SDK相关程序开发文件安装
- 2.1 更新系统
- 2.2 下载相关的程序文件包
- 2.2.1 下载相关的程序包文件
- 2.2.2 进入下载好的文件夹内
- 2.3 安装相关依赖(拔掉相机)
- 2.4 安装权限脚本
- 2.5 编译安装
- 2.6 相关测试
- 3. 相关说明
1. Intel RealSense SDK 2.0的安装
官网安装指南链接(distribution_linux.md): 官网指南链接
整理后的相关安装命令
1.1 注册服务器公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
1.2 添加服务器到本机repository
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
1.3 安装库文件
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
1.4 安装developer和debug的包(Optional but Recommended)
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
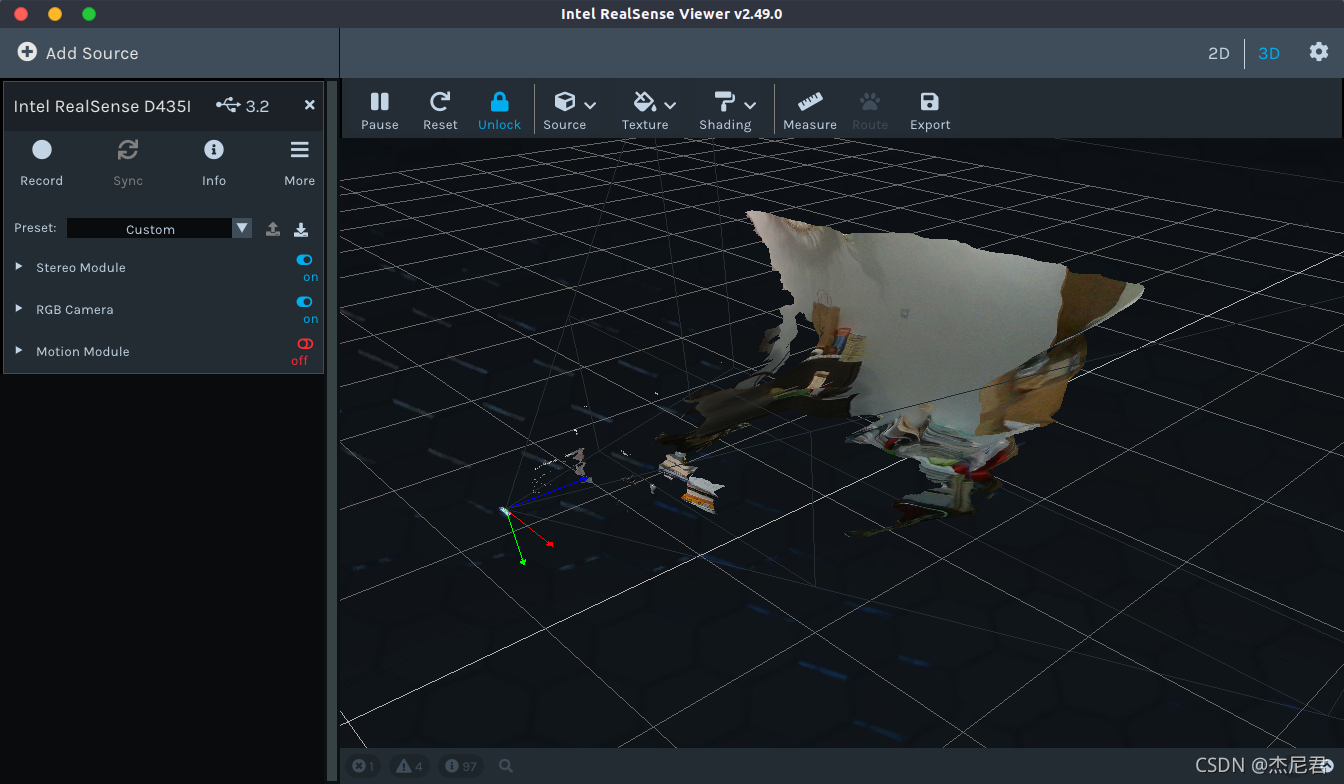
安装完成后,连接D435i相机到电脑的USB3.0的端口,使用以下命令行启动
realsense-viewer
启动后的窗口画面
- 打开窗口右侧三个小开关,观察相关的图像数据
- 使用鼠标左右键和滚轮分别移动整体的深度图像进行观察
2. RealSense SDK相关程序开发文件安装
官网安装指南链接(installation.md): 官网指南链接
整理后的相关安装命令
2.1 更新系统
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
2.2 下载相关的程序文件包
2.2.1 下载相关的程序包文件
- 方法一:使用git命令直接下载
git clone https://github.com/IntelRealSense/librealsense
- 方法二:手动下载,解压
从https://github.com/IntelRealSense/librealsense网站上下载相关压缩包,然后进行解压编译。
下载链接
2.2.2 进入下载好的文件夹内
cd librealsense
2.3 安装相关依赖(拔掉相机)
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
2.4 安装权限脚本
- 安装的时候有使用这一步,在使用命令
realsense-viewer打开相关的软件测试时,会出现红色相关信息,但是不影响其它操作,不使用这一步应该不会出什么问题。
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
2.5 编译安装
- 在使用
make命令时,等待的时间会相对较长
可以试着使用多线程进行相关的编译
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
- 下面的命令行是其它文章的相关命令,与上面的命令行是一样的
mkdir build
cd build
cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true
sudo make uninstall
make clean && make -j8
sudo make install
2.6 相关测试
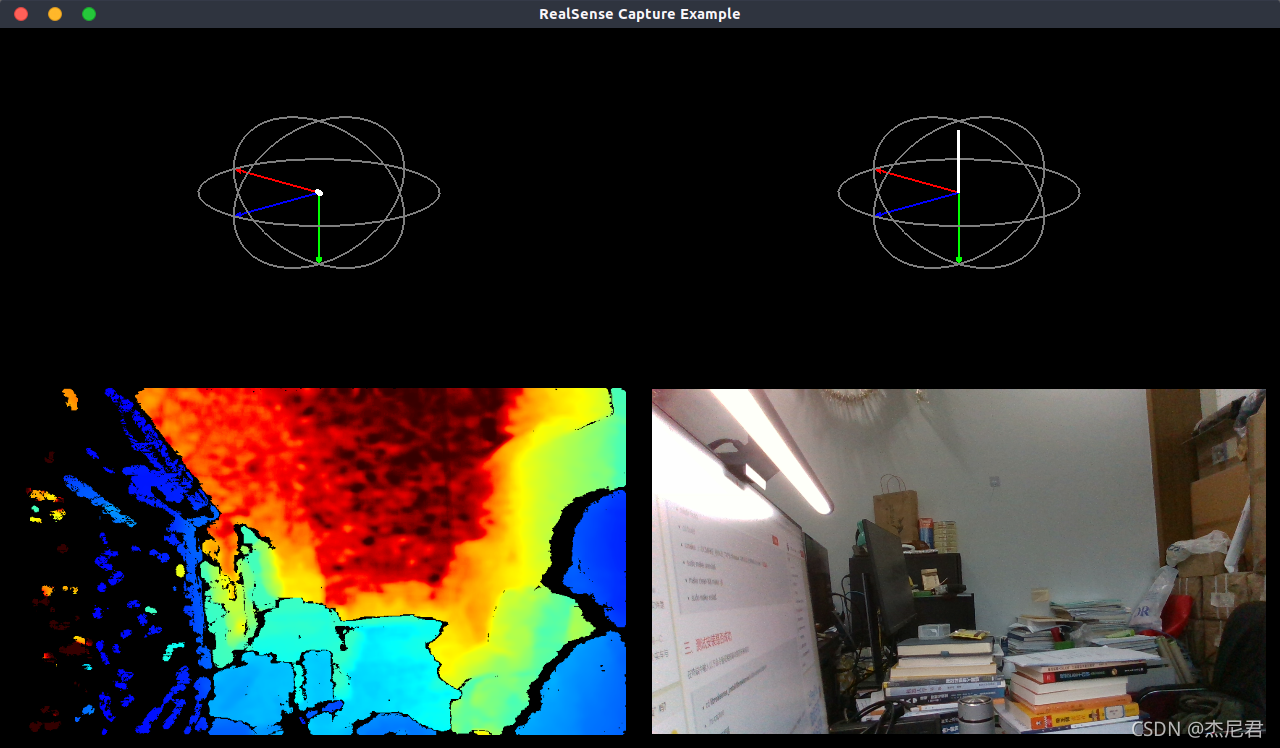
- 进入到
librealsense/build/examples/capture文件夹中 - 运行相关可执行文件
cd librealsense/build/examples/capture
./rs-capture
安装成功后,输入命令后,可以看到的窗口
3. 相关说明
librealsense2-dkms 是一个具有动态内核模块支持(DKMS)功能的Linux驱动包。没有集成到内核之中的Linux驱动程序需要手动编译,如果遇到因为发行版更新造成的内核版本的变动,由于Linux模块依赖于内核,之前编译的模块无法继续使用,只能重新编译。而DKMS可以维护内核外驱动程序,内核版本变动后能自动生成新的模块。
librealsense2-utils 提供了示例和工具。
librealsense2-dev 和librealsense2-dbg 是开发包和调试包,如果需要通过API去读取realsense的数据,就得安装这两个包。
-
相关参考链接:
-
Ubuntu18.04下安装RealSense D435i相机的SDK和ROS包
-
Ubuntu18.04 + ROS melodic 安装使用 RealSenseD435i
-
RealSenseD435i (一):Ubuntu18.04 下的安装、使用和bag录制 ,且解决 undefined symbol 问题(最简单的方法)
-
Realsense D435i使用笔记
这篇关于1、 D435i ----- Ubuntu18.04下D435i使用(SDK安装与测试)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







