本文主要是介绍ubuntu18上手intel d435i双目摄像头,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
intel d435i驱动暂时不支持ubuntu20,因为内核版本是5.4太高了。
ubuntu 18.04:
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
*********************Prerequisites
1. Make Ubuntu Up-to-date:
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
2. Download/Clone librealsense github repository:
git clone https://github.com/IntelRealSense/librealsense.git
or
git clone https://gitee.com/xxJian/librealsense
3. Prepare Linux Backend and the Dev. Environment:
3.1 Navigate to librealsense root directory to run the following scripts.
3.2 Install the core packages required to build librealsense binaries and the affected kernel modules:
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
Distribution-specific packages:
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
cd librealsense
./scripts/install_glfw3.sh
***********************************************************
这个过程太慢,需要手动修改install_glfw3.sh中,把https://github.com/glfw/glfw.git替换为https://gitee.com/xxJian/glfw
***********************************************************
3.3 Run Intel Realsense permissions script from librealsense root directory:
./scripts/setup_udev_rules.sh
3.4 Build and apply patched kernel modules for:
./scripts/patch-realsense-ubuntu-lts.sh
3.5 TM1-specific:
echo 'hid_sensor_custom' | sudo tee -a /etc/modules
4. Building librealsense2 SDK
mkdir build && cd build
cmake ../ -DBUILD_EXAMPLES=true
sudo make uninstall && make clean && make && sudo make install
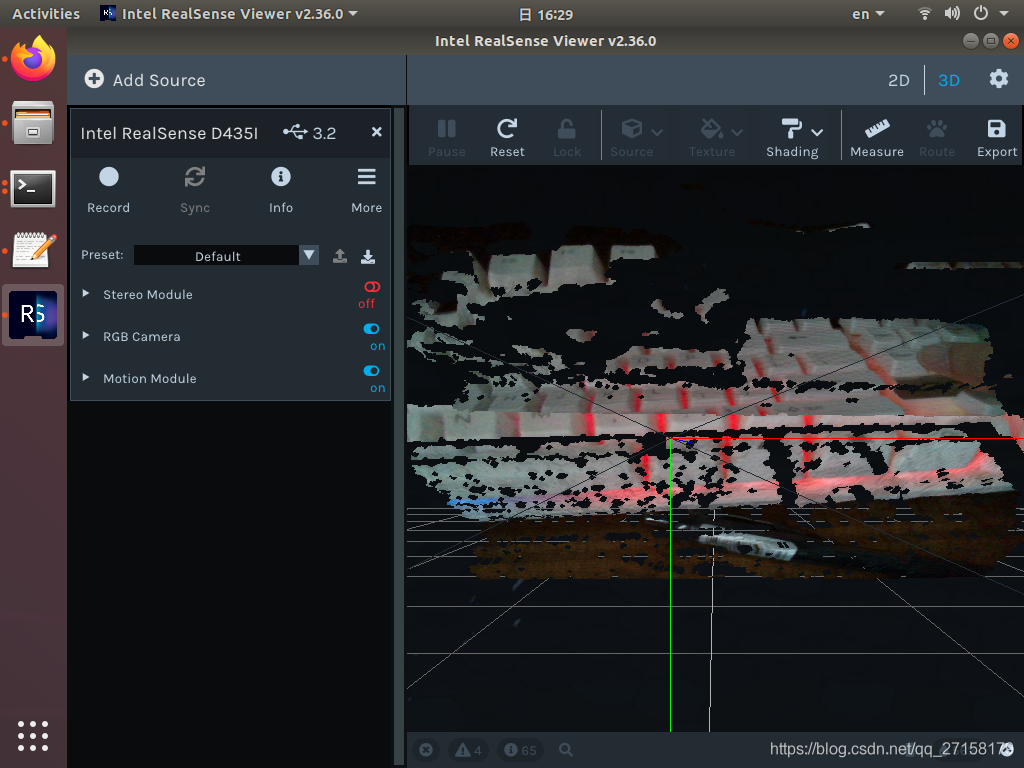
5. Reconnect the Intel RealSense depth camera and run: realsense-viewer to verify the installation.
到这里可以测试了

6. 远程桌面(失败了)
sudo apt install xrdp
sudo systemctl enable xrdp
7. 查看文件夹大小
du -sh
8. 打包整个librealsense,留底
sudo apt install p7zip-full p7zip-rar
7z a librealsense.7z librealsense
9. 复制压缩包到U盘
sudo fdisk -l,可以看到设备名称为/dev/sdb1,大小29.8G,文件格式FAT32。
sudo mount /dev/sdb1 /mnt
sudo cp librealsense.7z /mnt
sudo umount /mnt
这篇关于ubuntu18上手intel d435i双目摄像头的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





