双目专题

基于opencv实现双目立体匹配点云距离
双目相机或两个单目相机。 一、相机标定 MATLAB软件,打开双目标定app。 点击add images,弹出加载图像的窗口,分别导入左图和右图,设置黑白格长度(标定板的长度一般为20)。 点击确定,弹出加载好的图像。 在菜单栏勾选2 Coefficients(鱼眼相机勾选3 Coefficients)、Tangential Distinction,点击Calibrate,显示

7 自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植
自研rk3566/rk3588+rgbd相机之单目双目相机标定库开发与移植 1、单目双目标定介绍2、单目双目标定测试程序自动棋盘角点棋盘格检测算法 auto_cam.h自动棋盘角点棋盘格检测算法 auto_cam.cpp 3、单目双目标定程序移植makefile测试程序接口 4、测试图像 1、单目双目标定介绍 RGBD相机进行图像与点云融合前需要进行单目相机和双目相机的标定。单目

双目相机实现物体尺寸的精准测量
双目视觉系统是一种模拟人类双眼的立体视觉原理,通过两个摄像头从不同的角度捕捉同一场景的图像,从而获取目标物体的三维信息。 目录 1,设备选型 2,双目相机测量的现实意义 2.1 技术优势 2.2 面对的挑战 2.3 发展趋势 3,双目相机实现上述功能 4,效果验证 1,设备选型 淘宝百元款 2,双目相机测量的现实意义 质量检测:检测产品尺寸是否符合标准,如汽
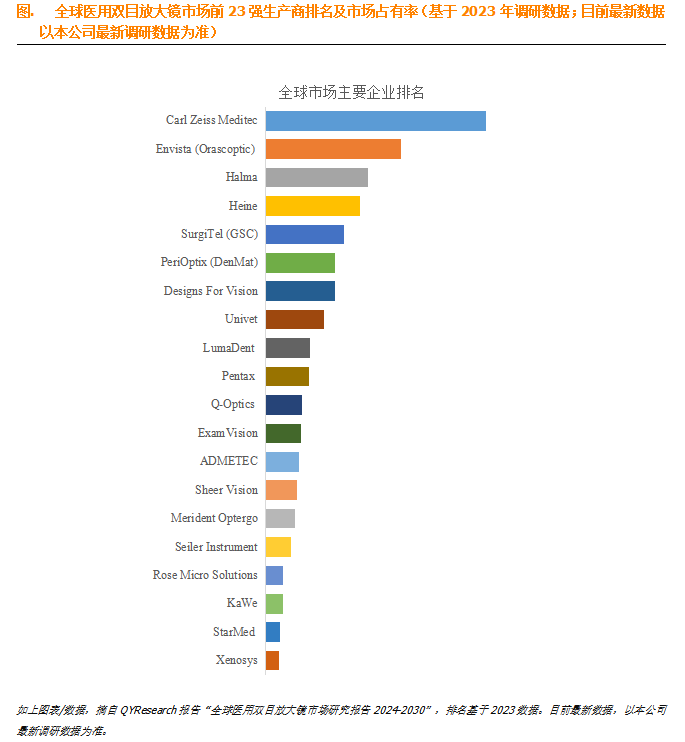
医用双目放大镜行业分析:前五大厂商占有大约39.0%的市场份额
一、当前市场状况 1. 市场规模与增长趋势 - 目前医用双目放大镜市场呈现出稳定增长的态势。据报告显示,预计到 2030 年全球市场规模将达到 5.2 亿美元,年复合增长率为 7.8%,这表明该行业具有较大的发展潜力。 - 增长的动力主要来自医疗行业对高精度诊断和治疗的需求不断增加,以及技术进步带来的产品性能提升。 2. 竞争格局 - 全球范围内的生产商主要有 Carl Zeis

深度学习三维重建-双目视差三维重建小笔记
记录一下深度学习进行双目三维重建看过的网络 持续更新(时不时更新) 数据集: SceneFlow KITTI ETH3D 与三维有关的数据集: TanksAndTemples 一大堆Github总结的数据集 Github大佬的笔记 -----------------------------------我是分界线------------------------------------ 双目三

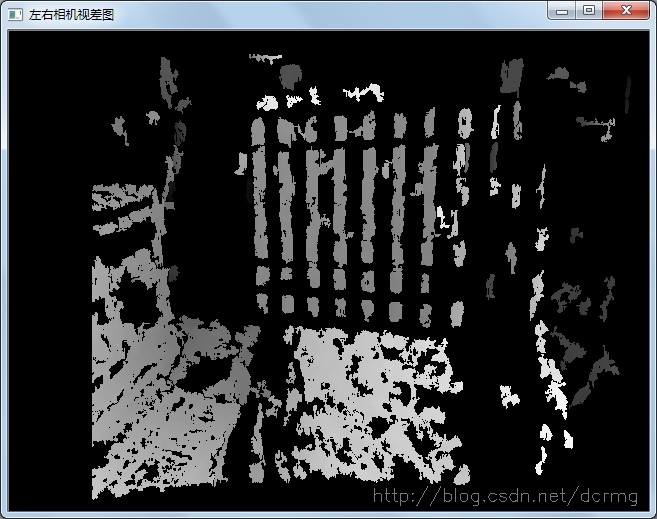
双目立体视觉 II:块匹配视差图计算
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Ali Yasin Eser 编译:ronghuaiyang 导读 双目立体视觉的第二部分,视差图计算算法。 大家好!欢迎来到立体视觉深度第二部分。我将简要解释块匹配算法。我假设您已经阅读了前一篇文章,如果你还没有读过,去读一下。我们将使用来自https://github.com/aliyasineser/stereoDep
双目立体视觉 I:标定和校正
点击上方“AI公园”,关注公众号,选择加“星标“或“置顶” 作者:Ali Yasin Eser 编译:ronghuaiyang 导读 双目立体校正和标定。 大家好!今天我们将讨论什么是立体摄像机,以及我们如何将它用于计算机视觉。通过使用这里的代码:https://github.com/aliyasineser/stereoDepth,我将解释我们如何为立体摄像机校准摄像机并计算视差图。我不
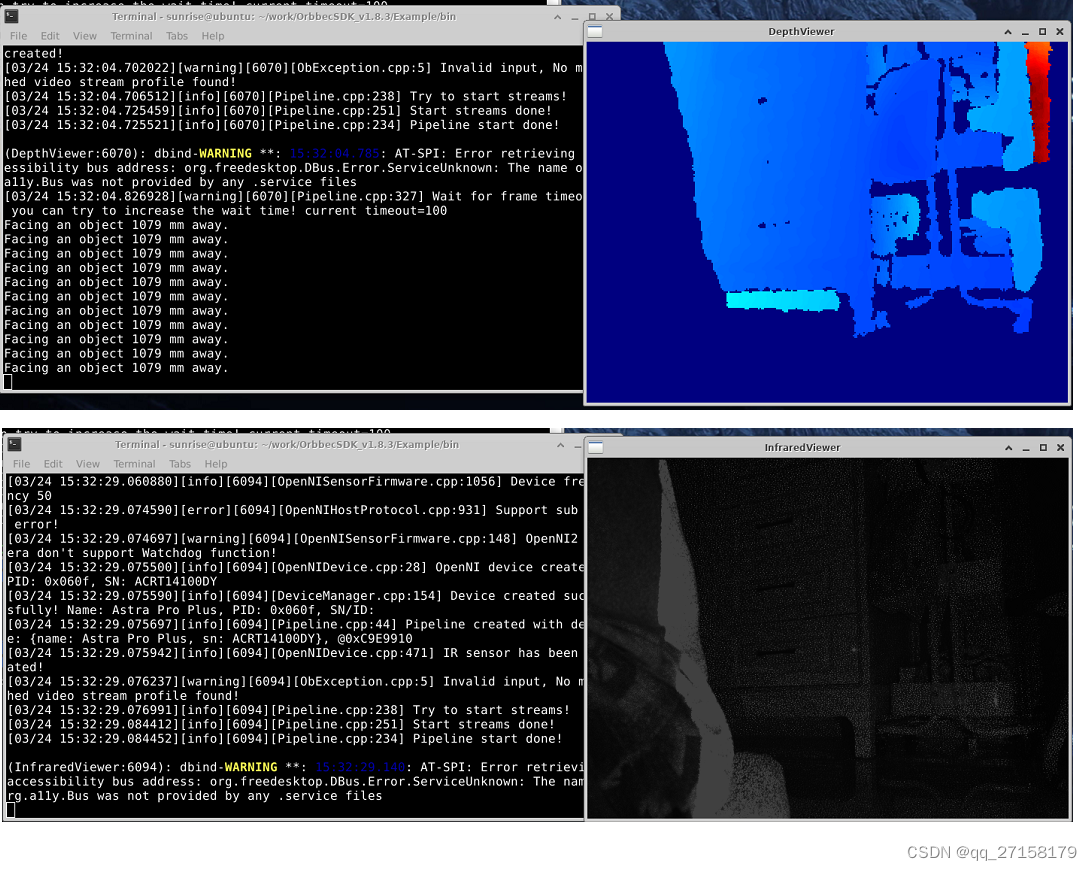
RDK X3(arm64) 测试国产双目摄像头Astra Pro Plus
0. 环境 - 亚博智能的ROSMASTER-X3 标准版(双目是 Astra Pro Plus) - RDK X3 1.0 1. RDK X3 1.0 串口通信 波特率 921600 root/root mobaterm -> Session -> VNC -> 192.168.8.108:5900 -> runrise 2. 是否识别到设备 2.1 USB扩展版上

车载客流统计设备:双目3D还原智能统计算法的应用与优势
随着城市交通的日益繁忙和公共交通系统的不断完善,对公交车等交通工具的客流统计和分析变得越来越重要。传统的客流统计方法往往存在效率低下、精度不足等问题,难以满足现代城市交通管理的需求。而基于双目3D还原智能统计算法的车载客流统计设备,以其实时、高效、精准的特点,成为了解决这一问题的有力工具。 一、双目3D还原智能统计算法简介 双目3D还原智能统计算法是一种基于双目视觉技术的客流统计方法。该算
双目相机标定以及立体测距原理及OpenCV实现
单目相机标定的目标是获取相机的内参和外参,内参(1/dx,1/dy,Cx,Cy,f)表征了相机的内部结构参数,外参是相机的旋转矩阵R和平移向量t。内参中dx和dy是相机单个感光单元芯片的长度和宽度,是一个物理尺寸,有时候会有dx=dy,这时候感光单元是一个正方形。Cx和Cy分别代表相机感光芯片的中心点在x和y方向上可能存在的偏移,因为芯片在安装到相机模组上的时候,由于制造精度和组装工艺的影响,很难
1.双目相机计算目标物体的距离
本文看了博文【深度相机系列三】深度相机原理揭秘--双目立体视觉-CSDN博客,该博文已经介绍的很清楚,在这里我只是根据自己的理解做了梳理,方便自己以后阅读。 更全的双目相机测距可看博客双目视觉原理(万字总结,包含Halcon代码)-CSDN博客 文章以上面这种形状的双目相机为例,假设左右两个相机位于同一平面(光轴平行),且相机参数(如焦距f)一致。那么深

基于python与OpenCV的双目视觉匹配测距系统设计与实现
基于python与OpenCV的双目视觉匹配测距系统设计与实现 “Design and Implementation of a Stereoscopic Vision Matching and Distance Measurement System using Python and OpenCV” 完整下载链接:基于python与OpenCV的双目视觉匹配测距系统设计与实现 文章目录
双目相机标定流程(MATLAB)
一:经典标定方法 1.1OPENCV 1.2ROS ROS进行双目视觉标定可以得到左右两个相机的相机矩阵和畸变系数,如果是单目标定,用ROS会非常方便。 3.MATLAB标定(双目标定) MATLAB用来双目标定会非常方便,主要是为了得到两个相机之间的旋转矩阵R和平移矩阵T。 前提是已经已经用两个相机拍摄好多组照片。 二:采用matlab双目标定流程 2.1选择matlab中
双目深度估计原理立体视觉
双目深度估计原理&立体视觉 0. 写在前面1. 双目估计的大致步骤2. 理想双目系统的深度估计公式推导3. 双目标定公式推导4. 极线校正理论推导 0. 写在前面 双目深度估计是通过两个相机的对同一个点的视差来得到给该点的深度。 标准系统的双目深度估计的公式推导需要满足:1)两个相机的光轴水平; 2) 两个相机焦距分辨率一致,也即内参一致;3)两个相机的成像平面水平,两个相机坐标

3D视觉(三):双目摄像头的标定与校正
3D视觉(三):双目摄像头的标定与校正 对于双目摄像头而言,除了需要分别标定左目摄像头的内参矩阵K1、畸变系数D1、右目摄像头的内参矩阵K2、畸变系数D2,还需要标定左右目对应的旋转矩阵R和平移向量T。当双目摄像头固定在一个平面上时,旋转矩阵R可近似为一个单位阵,平移向量T的欧式范数即为基线长度b。 我们可以把两个相机都看作针孔相机,它们是水平放置的,意味着两个相机的光圈中心都位于x轴上,两

3D视觉(一):双目摄像头的调用
3D视觉(一):双目摄像头的调用 文章目录 3D视觉(一):双目摄像头的调用1、计时器 chrono2、单目摄像头的调用3、双目摄像头的调用参考 1、计时器 chrono chrono是C++11新加入的方便时间日期操作的标准库,它既是相应的头文件名称,也是std命名空间下的一个子命名空间,所有时间日期相关定义均在std::chrono命名空间下。 通过这个新的标准库,可以非
双目视觉(双目相机)
1.时间同步 需要一个单独的硬件(单片机)单独给每一个相机发送触发信息,然后再接收返回。 2.相机选型: (1)相机的分辨率 根据对图像精度的要求来选择相机的分辨率。 (2)颜色 通常视觉中我们选择黑白相机,只有需要彩色图像时才会考虑彩色相机,因为机器视觉中黑白图像算法比较多,黑白相机使用光源成像质量比彩色相机复合白光质量要好。 (3)传感器类型 拍摄目标静态,为了节约成本优先
创龙Xilinx Zynq-7000系列XC7Z035/XC7Z045/XC7Z100高性能SoC处理器评估板双目摄像头接口
CPU CPU为Xilinx Zynq-7000 SOC,兼容XC7Z035/XC7Z045/XC7Z100,平台升级能力强,以下为Xilinx Zynq-7000特性参数: 创龙TLZ7xH-EVM是一款基于Xilinx Zynq-7000系列XC7Z035/XC7Z045/XC7Z100高性能SoC处理器设计的高端评估板,处理器集成PS端双核ARM Cortex-A9 + PL端K
YOLOV5 + 双目相机实现三维测距(新版本)
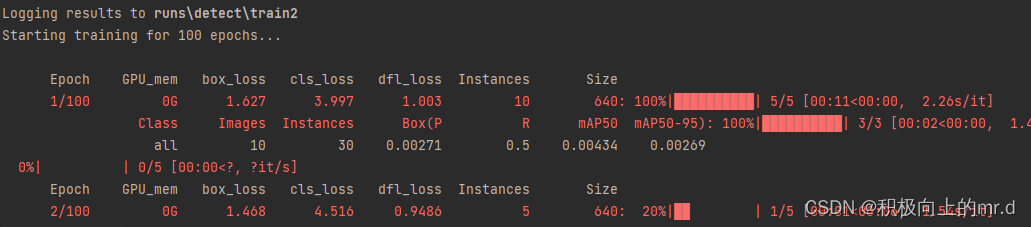
文章目录 YOLOV5 + 双目相机实现三维测距(新版本)1. 项目流程2. 测距原理3. 操作步骤和代码解析4. 实时检测5. 训练6. 源码下载 YOLOV5 + 双目相机实现三维测距(新版本) 本文主要是对此篇文章做一些改进,以及解释读者在复现过程中遇到的问题,完整代码在文章末尾 1. 项目流程 YOLOv5检测目标并提取其中心像素点坐标双目相机经过系列操作将像素点坐
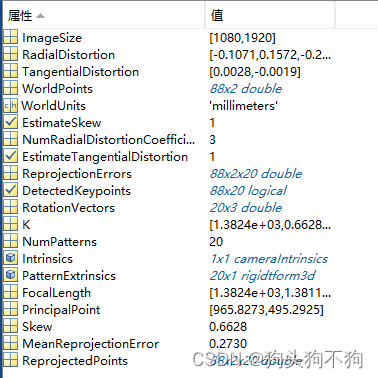
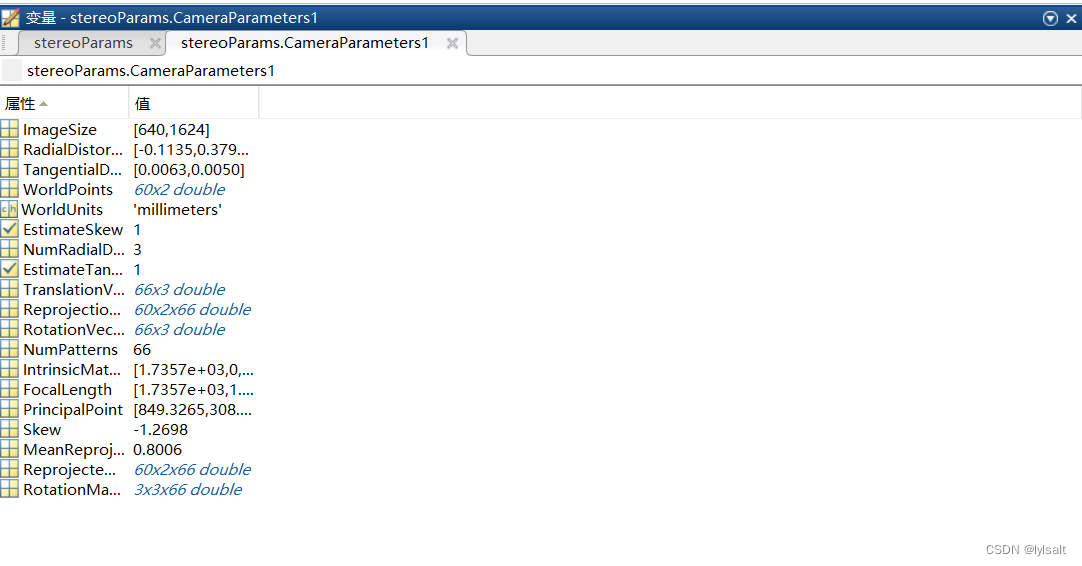
【matlab下的双目内窥镜标定与深度测距-双目标定内容】
【matlab下的双目内窥镜标定与深度测距-双目标定内容】 在本片中主要讲述如何通过matlab标定双目内窥镜,以及标定结果参数的含义,和使用方法 一般来说标定相机由opencv标定和matlab 标定两种方法,但是opencv由于是全部自主化进行,没有办法调整标定中的图像样本,因此普遍来说,标定精度会弱于matlab。建议在标定时使用matlab标定。 这里是目录 标定过程参数分析极
【matlab下的双目内窥镜标定与深度测距-双目成像原理】
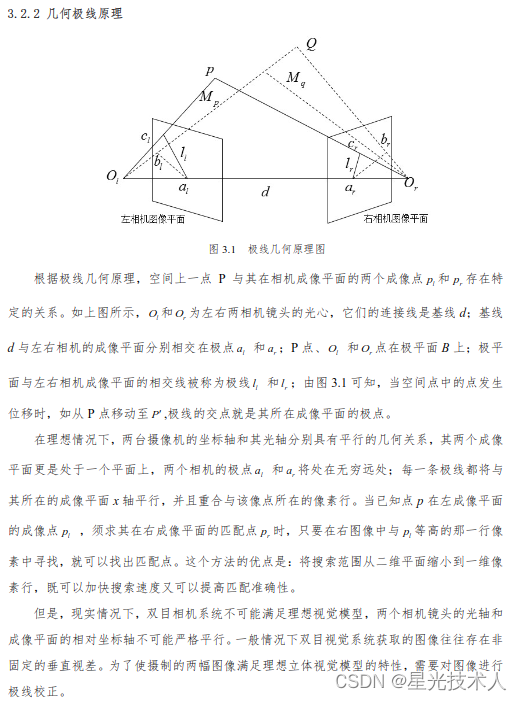
【matlab下的双目内窥镜标定与深度测距-双目成像原理】 这里是目录 介绍坐标系关系相互关系推导三角测量 介绍 双目成像是一种利用两个摄像头或摄像头组成的系统同时捕捉场景信息的技术。它模拟了人类双眼视觉系统,通过两个视角获取的图像来计算深度信息,从而实现三维感知和场景重建。 坐标系关系 在双目成像方法中共存在四个坐标系: 世界坐标系:是一个三维空间中的坐标系,用来描述物体

双目运算符和单目运算符的重载
目录 题目 源码 结果示例 题目 建立一个矩阵类,可以完成指定的操作或运算。 说明: 矩阵为2行3列,基类型为整型;操作或运算:初始化(>>)、输出(<<)、赋值(=)、两个同类型矩阵的相加(+)、矩阵前置自增(++,即所有元素都加1)、矩阵后置自增(++,即所有元素都加1)、一个整数乘矩阵(*,即该整数乘以每个元素)、矩阵乘一个整数(*,即每个元素乘以该整数)。 要求:

YOLOV8 + 双目测距
YOLOV8 + 双目测距 1. 环境配置2. 测距流程和原理2.1 测距流程2.2 测距原理 3. 代码部分解析3.1 相机参数stereoconfig.py3.2 测距部分3.3 主代码yolov8-stereo.py 4. 实验结果4.1 测距4.2 测距+跟踪4.3 测距+跟踪+分割4.4 视频展示 相关文章 1. YOLOv5+双目测距(python) 2. YOLO

基于opencv SGBM的双目深度图提取在FPGA上的实现
代码分享于github: https://github.com/tishi43/sgbm 主要包含以下部分: line_buffer_8row.sv, 从ddr读左图和右图,缓存8行,为什么8行,5x5的cost加窗运算最多要7行图像,此7行用来输出,另一行用来从ddr读入。 calc_bt_cost.sv,代价计算,正向的代价计算,从x=minD开始到width-1,反向的代价

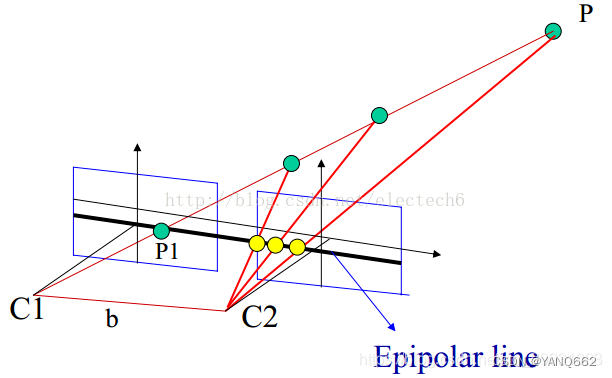
计算机视觉之三维重建(5)---双目立体视觉
文章目录 一、平行视图1.1 示意图1.2 平行视图的基础矩阵1.3 平行视图的极几何1.4 平行视图的三角测量 二、图像校正三、对应点问题3.1 相关匹配法3.2 归一化相关匹配法3.3 窗口问题3.4 相关法存在的问题3.5 约束问题 一、平行视图 1.1 示意图 如下图即是一个平行视图。特点:(1) 两个平面平行。 (2) 基线平行于图像平面,极点 e e e