本文主要是介绍【ROS进阶】Intel RealSence D435i在ros系统中启动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨
📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】
📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉
📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处
文章目录
- 前言
- 一、环境配置
- 二、注意事项
- 三、启动相机
- 3.1 连接相机
- 3.2显示rviz
- 四、最终效果
- 参考的博客
前言
产品全称:Intel RealSense Depth Camera D435i 英特尔的实感相机
官网介绍:https://www.intelrealsense.com/zh-hans/depth-camera-d435i/。看官网的介绍就很全面。
D435i,该产品可以看作是D435的升级版,和D435的区别就在于多了一个IMU。D435i和前代规格几乎相当,其特点是不仅提供深度传感器模组,还配备了一个IMU单元(惯性测量单元,采用的博世BMI055)。凭借内置的IMU单元,结合视觉数据可实现6DoF追踪功能。其中,IMU将各种线性加速度计和陀螺仪数据结合,可检测X,Y,Z三轴的旋转和平移,以及俯仰、横摇等动作。

参数:
1.RGB摄像头分辨率:200万像素,1920 × 1080
2.深度摄像头分辨率:1280x720
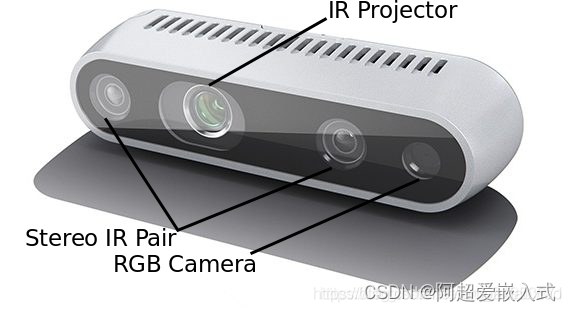
3.组成:一对立体红外传感器(IR Stereo Camera)、一个红外激光发射器(IR Projector)和一个彩色相机(RGB传感器)。
4.误差等级:高精度,近距离毫米为单位
5.视频传输速度:90fps
6.深度距离:在0.1 m~6 m之间,能探测到的最大深度是6米。
适用场景:
室内以及户外阳光下也可以使用
一、环境配置
在ubuntu中安装完D435i后,再进行这一步。
安装步骤
1.创建一个工作空间
mkdir -p ~/realsense_ws/src && cd ~/realsense_ws/src
2.在src中下载realsense-ros这个功能包
git clone https://github.com/IntelRealSense/realsense-ros.git
3.编译
cd ~/realsense_ws
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
4.配置环境变量
echo “source ~/realsense_ws/devel/setup.bash” >> ~/.bashrc
source ~/.bashrc
二、注意事项
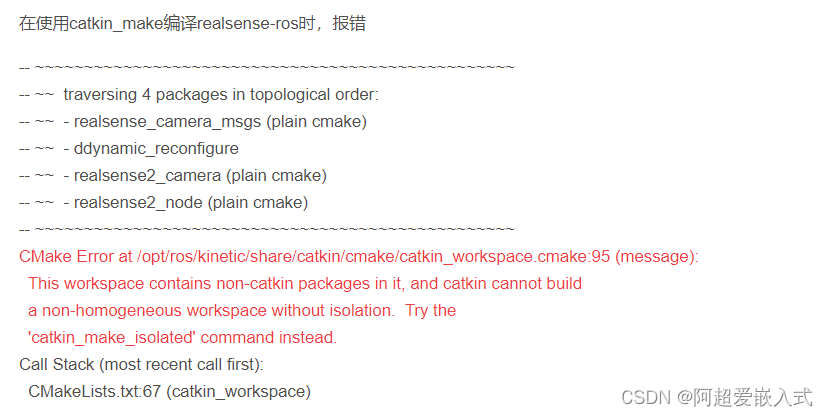
在下载完realsense-ros源码后,不要运行以下两行指令
cd realsense-ros/realsense2_camera
git checkout git tag | sort -V | grep -P "^\d+\.\d+\.\d+" | tail -1
不然会报错:
三、启动相机
3.1 连接相机
下载ros-melodic-rgbd-launch
sudo apt install ros-melodic-rgbd-launch
roslaunch realsense2_camera rs_rgbd.launch
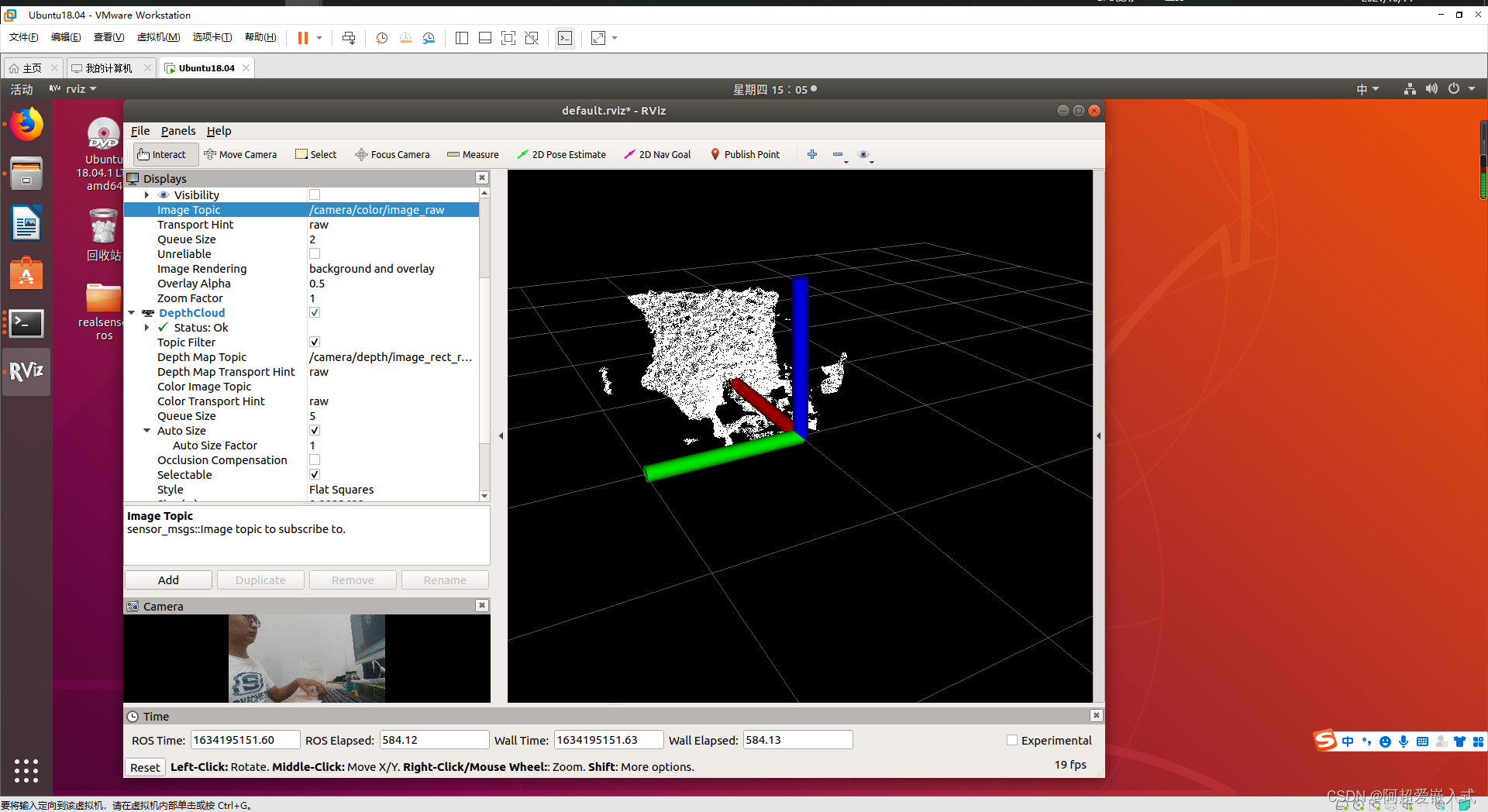
3.2显示rviz
在rviz 修改左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link,点击该框中的Add -> 上方点击 By topic选择要添加的功能
添加相机和深度插件 或是rqt_image_view
四、最终效果
成功在ROS系统中打开Intel RealSence D435i相机。
参考的博客
参考1
参考2
这篇关于【ROS进阶】Intel RealSence D435i在ros系统中启动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






