realsence专题
Realsence D455标定并运行Vins-Fusion
文章目录 一、双目相机标定1. 标定板准备1.1 打印标定板1.2 标定板信息原始pdf的格子参数是:调整后的格子参数是: 2. 左右目相机数据准备2.1 修改rs_camera.launch内容2.2 关闭结构光2.3 可视化双目图像2.4 修改相机播包帧数2.5 录制数据 3. kalibr 程序标定4. kalibr 标定结果 二、IMU标定1. 标定工具准备1.1 code_uti
【ROS进阶】Intel RealSence D435i在ros系统中启动
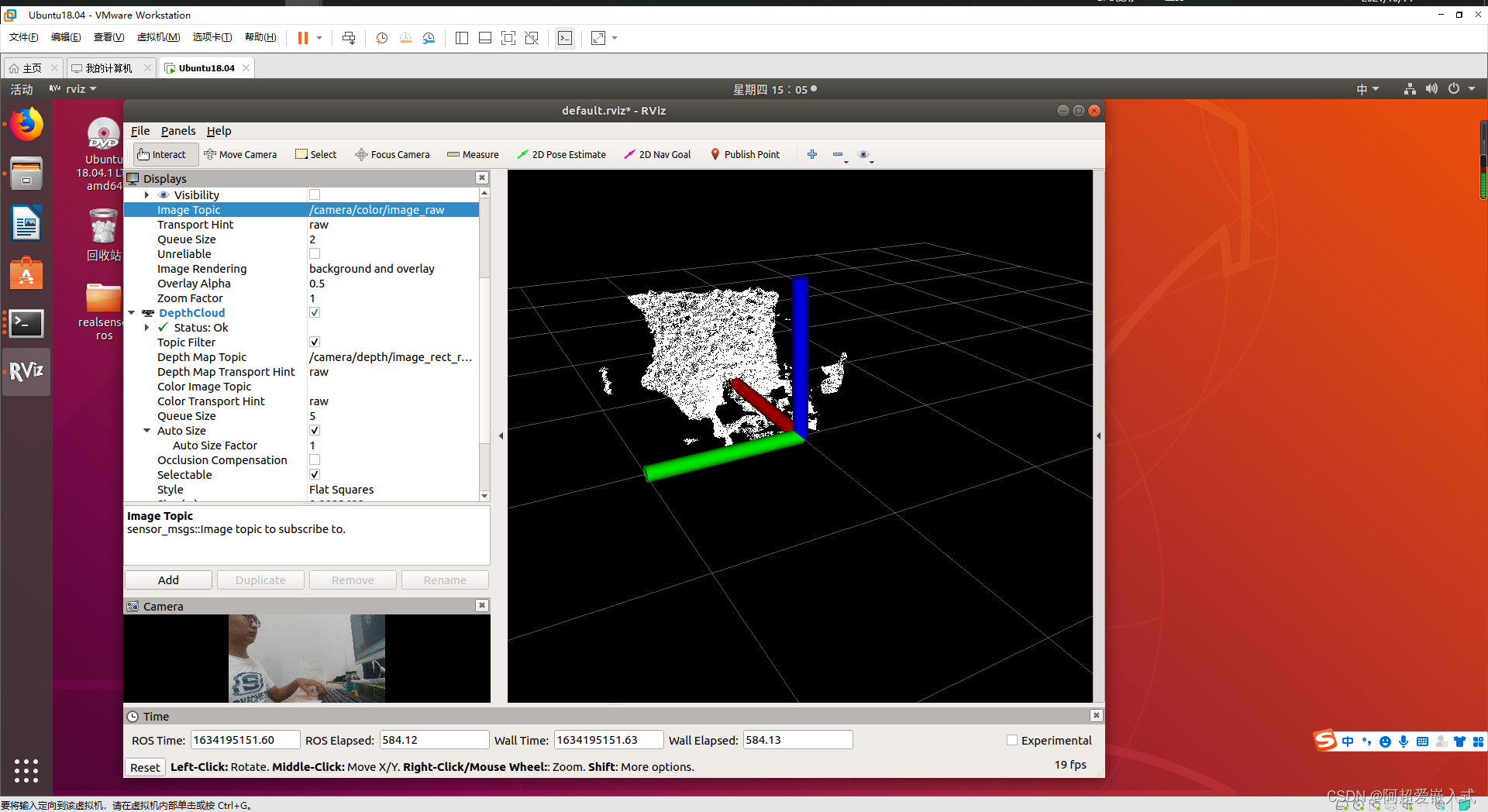
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉 📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处 文章目录 前言一、环境配置二、注意事项三、启动相机3.1 连接相机3.2显示rviz 四、
![[解决方法]realsence D455 在jetson nano 无法正常读取imu数据(/camera/imu、/camera/accel/sample)](https://img-blog.csdnimg.cn/5ed6f20ca0f5474a81f3aac2db96ae49.png)
[解决方法]realsence D455 在jetson nano 无法正常读取imu数据(/camera/imu、/camera/accel/sample)
hardware:jetsonnano myenv:官方提供的ubuntu18镜像 问题描述:d455 其余数据均能够正常显示,但是不论用realsence_viewer还是通过ros启动launch文件,均无法正常显示imu话题数据,和/camera/imu 、 /camera/accel/sample 都没有数据输出。 最终找到解决方案,亲测有效:感谢Unable to read IM

ubuntu下realsence相机通过ros话题直接读取内参
roslaunch realsense2_camera rs_camera.launch //打开相机节点rostopic echo /camera/color/camera_info //查看相机内参 根据官网链接:docs.ros.org/en/melodic/api/sensor_msgs/html/msg/CameraInfo.html D:表示相机的失真系数,其参数分别是(k1,

PCL处理Realsence点云数据
浪费了一个月时间,查了很多资料,然后各种用ubuntu编译,最后结果还是不行,尝试到最后,终于发现一个东西,就是realsense_grabber,但是不是PCL里面自带那个,是独立的。利用这个,我终于可以获取点云数据了。 接下来我说一下需要的东西以及步骤: 首先我们需要的软件有:PCL1.8.0-all-in-one,具体版本自己选择,我的是vs2015-win64版本。然后是RSSDK,就
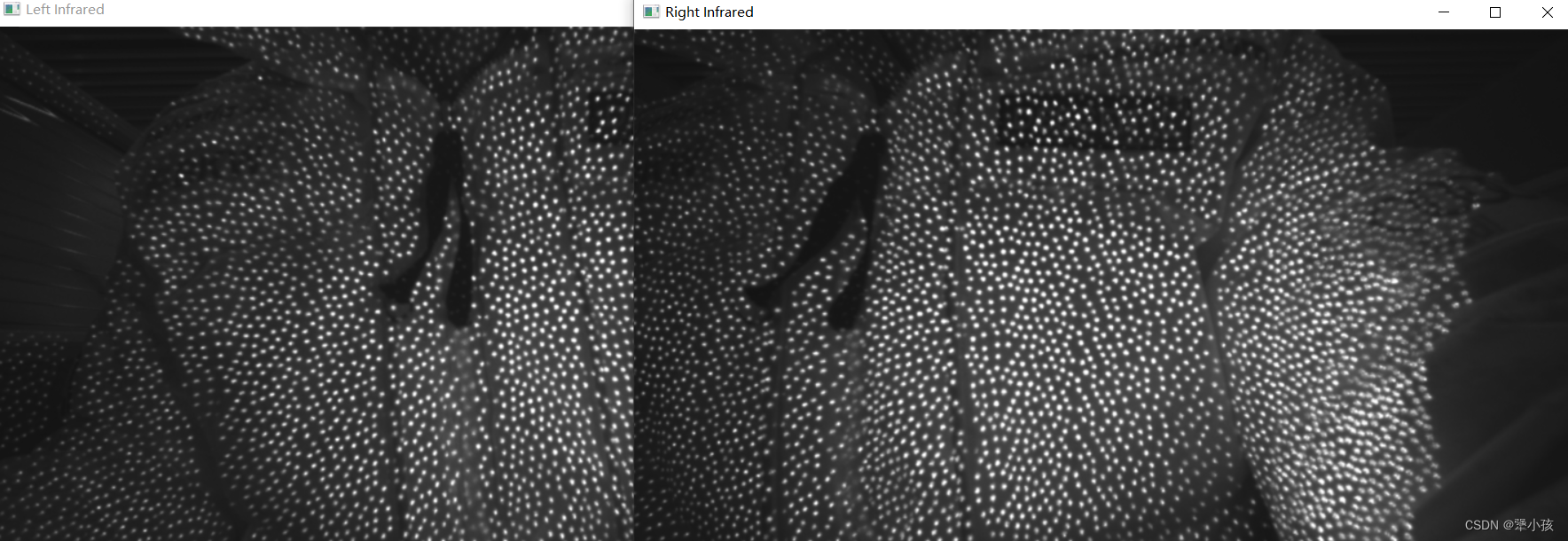
realsence 455 查看左右摄像头
前言 我打算使用realsence的左右连个摄像头去自己标定配准、然后计算距离的,就需要找s、下载包。 没成想,这个455的左右摄像头是红外的 步骤 安装sdk: Intel RealSense SDK 2.0 – Intel RealSense Depth and Tracking cameras 尽量在win上安装,ubuntu步骤真的要吐 安装python包或者其他包 p