本文主要是介绍[解决方法]realsence D455 在jetson nano 无法正常读取imu数据(/camera/imu、/camera/accel/sample),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
hardware:jetsonnano
myenv:官方提供的ubuntu18镜像
问题描述:d455 其余数据均能够正常显示,但是不论用realsence_viewer还是通过ros启动launch文件,均无法正常显示imu话题数据,和/camera/imu 、 /camera/accel/sample 都没有数据输出。
最终找到解决方案,亲测有效:感谢Unable to read IMU data on the D435i · Issue #10304 · IntelRealSense/librealsense · GitHub![]() https://github.com/IntelRealSense/librealsense/issues/10304#issuecomment-1067255231
https://github.com/IntelRealSense/librealsense/issues/10304#issuecomment-1067255231
# Uninstall all realsense packages
sudo apt remove librealsense2 ros-melodic-realsense2-camera librealsense2-udev-rules ros-melodic-librealsense2 librealsense2-dev# Reinstall librealsense2 at version 2.48.0 and place those packages on hold (to prevent
# automatic upgrades)
sudo apt install \librealsense2=2.48.0-5ubuntu5~1.gbp156c1b \librealsense2-udev-rules=2.48.0-5ubuntu5~1.gbp156c1b \librealsense2-utils=2.48.0-5ubuntu5~1.gbp156c1b \librealsense2-gl=2.48.0-5ubuntu5~1.gbp156c1b \librealsense2-net=2.48.0-5ubuntu5~1.gbp156c1b \librealsense2-dev=2.48.0-5ubuntu5~1.gbp156c1b
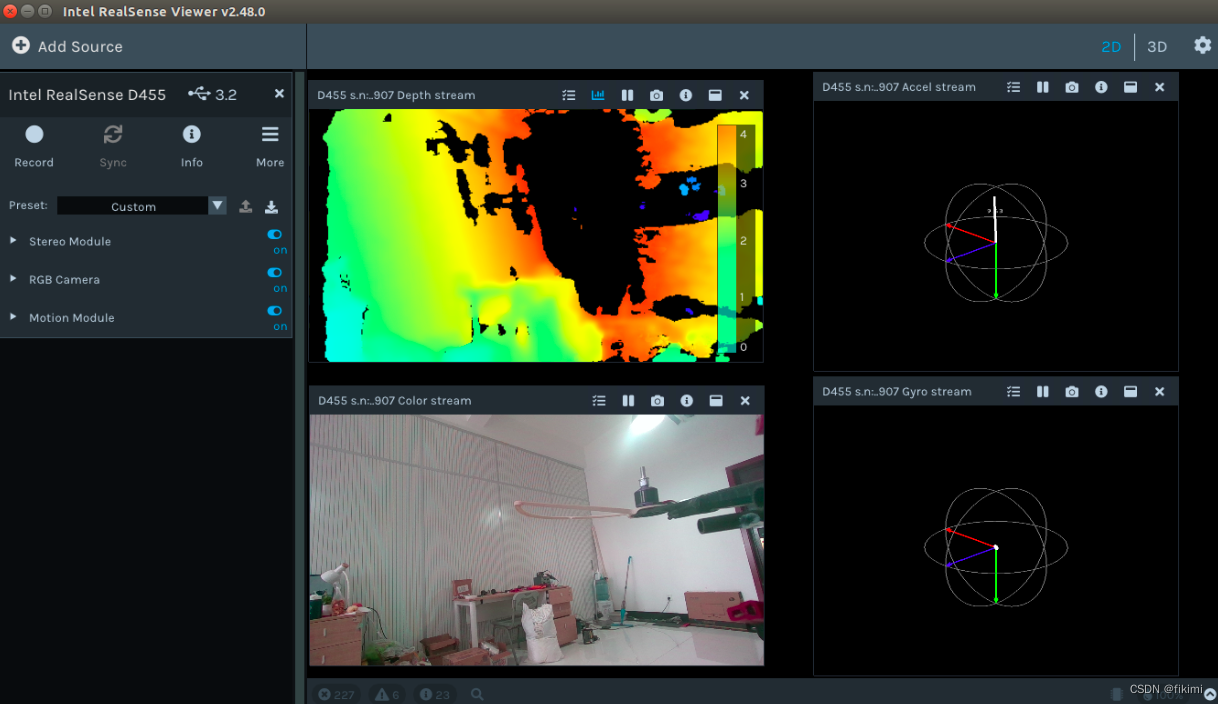
sudo apt-mark hold \librealsense2 \librealsense2-udev-rules \librealsense2-utils \librealsense2-gl \librealsense2-net \librealsense2-dev# To remove the hold on the package versions, just run `sudo apt-mark unhold <package name>`viewer测试结果显示正常!!
对于ros话题,删除原先2.5的版本
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout 2.3.1
cd ..
catkin_init_workspace
cd ..
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc也是亲测有效!可以正常显示imu话题数据
这篇关于[解决方法]realsence D455 在jetson nano 无法正常读取imu数据(/camera/imu、/camera/accel/sample)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






