jetson专题

完整指南:CNStream流处理多路并发框架适配到NVIDIA Jetson Orin (二) 源码架构流程梳理、代码编写
目录 1 视频解码代码编写----利用jetson-ffmpeg 1.1 nvstream中视频解码的代码流程框架 1.1.1 类的层次关系 1.1.2 各个类的初始化函数调用层次关系 1.1.3 各个类的process函数调用层次关系 1.2 编写视频解码代码 1.2.1 修改VideoInfo结构体定义 1.2.2 修改解封装代码 1.2.3 decode_impl_nv.h

Jetson Xavier NX apt更换国内源
在xavier NX板子上安装软件包的时候,网速特别慢,于是想更换源,网上找到了如下博客,验证可用。 原文地址 [NVIDIA]-3 入手 Jetson Xavier NX apt更换国内源_darnell888的博客-CSDN博客 本文主要讲述,基于 Jetson Xavier NX 开发者套件apt更换国内源。 What is Jetson Xavier NX : NVIDIA® Jet
NVIDIA Jetson xavier NX安装torchvision
上一篇文章里面记录了在xavier NX上安装pytorch,https://www.cnblogs.com/cumtchw/p/13273753.html 然后接下来安装torchvision,下面是英伟达官网上的torchvision的安装方法:https://forums.developer.nvidia.com/t/pytorch-for-jetson-nano-version-1-5-

Jetson AGX Xavier避坑指南(三)——环境搭建1.(python3、pip、virtualenv、ros)_转载
原文网址如下:https://blog.csdn.net/zxxxiazai/article/details/103419986
Jetson xavier NX 485串口接口封装/Jetson Xavier NX 串口通讯
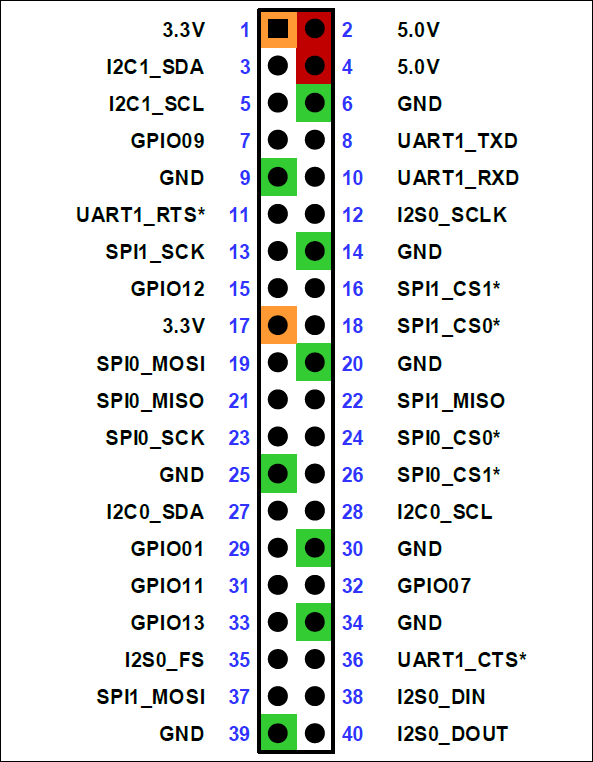
目录 1.查看Jetson Xavier NX串口 2.硬件调试环境搭建 3.代码 3.1.dataType.h 3.2.rs485Service.h 3.3 rs485Service.cpp 3.4 demo 4 实验结果 1.查看Jetson Xavier NX串口 首先查看NX板子上的串口,执行 ll /dev | grep tty 可以看到串口,这次我们使用ttyT

jetson xavier nx 编译使用 libtorch
不能直接下载编译好的。使用起来会报错要自己编译,详细根据自己的 JetPack 去下载对应版本 下载地址:JetPack libtorch下载地址 3.安装 sudo apt-get update sudo apt-get upgradesudo apt-get install python3-pip libopenblas-base libopenmpi-devpip3 instal
NVIDIA Jetson Orin Nano Spidev 使用教程
系列文章目录 前言 该项目包含一个 python 模块,用于通过 spidev linux 内核驱动程序从用户空间连接 SPI 设备。 除非另有明确说明,否则所有代码均已获得 MIT 许可。 一、使用方法 import spidevspi = spidev.SpiDev()spi.open(bus, device)to_send = [0x01, 0x02, 0x0
在NVIDIA Jetson AGX Orin中使用jetson-ffmpeg调用硬件编解码加速处理
目录 1 build and install library 1.1 报错 Cannot found LIB_NVBUF 2 patch ffmpeg and build 参考文献: 1 build and install library git clone https://github.com/Keylost/jetson-ffmpeg.gitcd jetson-ffmpe

NVIDIA Jetson AGX Orin源码编译安装CV-CUDA
目录 1 下载源码并配置 2 编译安装CV-CUDA 2.1 安装相应依赖包 2.2 升级gcc到gcc-11 2.3 build 2.4 升级cmake 2.5 再次build 2.5.1 报错 /usr/include/c++/11/bits/std_function.h:435:145: error: parameter packs not expanded with ‘.

Jetson安装Archiconda3全过程
1. 下载Archiconda3 下载网址: 发布 ·Archiconda/build-tools --- Releases · Archiconda/build-tools (github.com) 2. 执行命令 bash ./Archiconda3-0.2.2-Linux-aarch64.sh 3. conda换源 conda config --add channels
在NVIDIA jetson中使用jetson-ffmpeg调用硬件编解码加速处理
目录 1 build and install library 1.1 报错 Cannot found LIB_NVBUF 2 patch ffmpeg and build 参考文献: 1 build and install library git clone https://github.com/Keylost/jetson-ffmpeg.gitcd jetson-ffmpe
Jetson Orin Nano安裝torch torchvision
#https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048# 準備好2個文件放在Dir裏1. torch-2.1.0a0+41361538.nv23.06-cp38-cp38-linux_aarch64.whl 下載地址 https://forums.developer.nvidia.com/t/pytorch-for-jetso
【jetson交叉编译(6)】orin ubuntu的库安装,通过apt下载deb 库,然后的解压到具体位置/opt/test/3rd
基于【【jetson交叉编译(5)】如何将apt安装的库复制出来?】得到了deb库 要将一个 .deb 包解压缩到特定位置 /opt/test/3rd,你可以使用以下步骤: 安装 dpkg 和 ar 工具: 确保你已经安装了 dpkg 和 ar 工具。这些工具通常在大多数 Ubuntu 系统中已经安装。 如果没有安装,可以使用以下命令进行安装: sudo apt-get updatesud
JetSon Tx1 串口使用记录
最近在学习使用Jetson Tx1,下面是使用串口遇到的问题,做为我的第一篇博客。 Jetson Tx1串口是TTL电平。 Jetson Tx1的UART0在Linux上的设备号是“/dev/tty0”,但是在Tx1刷的系统中,UART0默认是做为console serail设备使用的,这个具体有什么作用,我也不大清楚了,百度一下也不是很懂。这就导致了在Linux上使用串口调试工具和PC机相连
ardupilot开发 --- Jetson Orin Nano 后篇
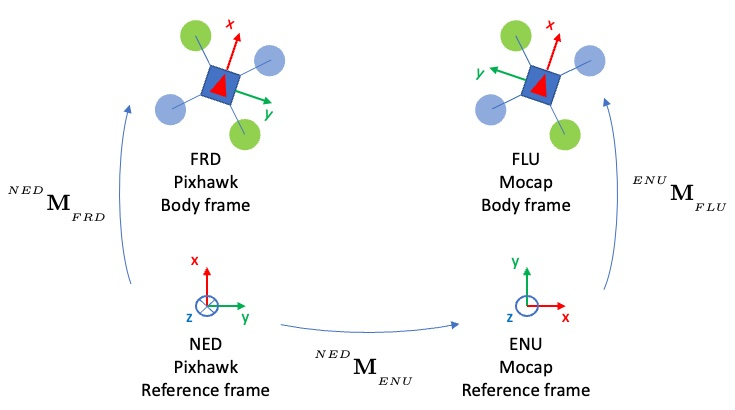
我拼命加速,但贫穷始终快我一步 0~1920. visp-d455:基于IBVS的Pixhawk无人机视觉伺服20.1 基础关于连接、通讯、UDP forward服务:一些相关的、有用的例程Linux C++程序的gdb断点调试搭建仿真解决【testPixhawkDroneTakeoff.cpp例程能解锁但起飞命令无响应,断点模式下却有响应】问题解决【使用最新的mavsdk版本导致vis

Jetson AGX Orin基于BlueZl蓝牙协议栈AOJ红外蓝牙体温计开发(低功耗蓝牙ble)
一、准备工作 安装blueZ以及相关的蓝牙测试工具: sudo apt updatesudo apt install bluezsudo apt install bluez-hcidump 然后看下蓝牙设备是否识别到,已经是否处于开启状态: root@test-desktop:~# hciconfig -ahci0: Type: Primary Bus: USBBD Addr
arm x86 交叉编译 ROS 项目程序最简单的方式及踩坑完整经验 ,亲测可以运行简单和复杂的 ROS 项目 Jetson Xavier NX 3588
需求: ROS 程序源代码每次在 NX 或者 RK3588 编译很慢,并且有源代码泄露的风险,需要在x86 intel 的笔记本 ubuntu 的环境交叉编译 ROS 程序, 之前试过传统的ros 项目交叉编译方式,特别复杂依赖很多,并且试了很久都不成功,这次尝试了通过 Docker 移植的方案,很简单也比较顺利。 安装qemu sudo apt install qemu qemu-
NVIDIA Jetson AI边缘计算盒子
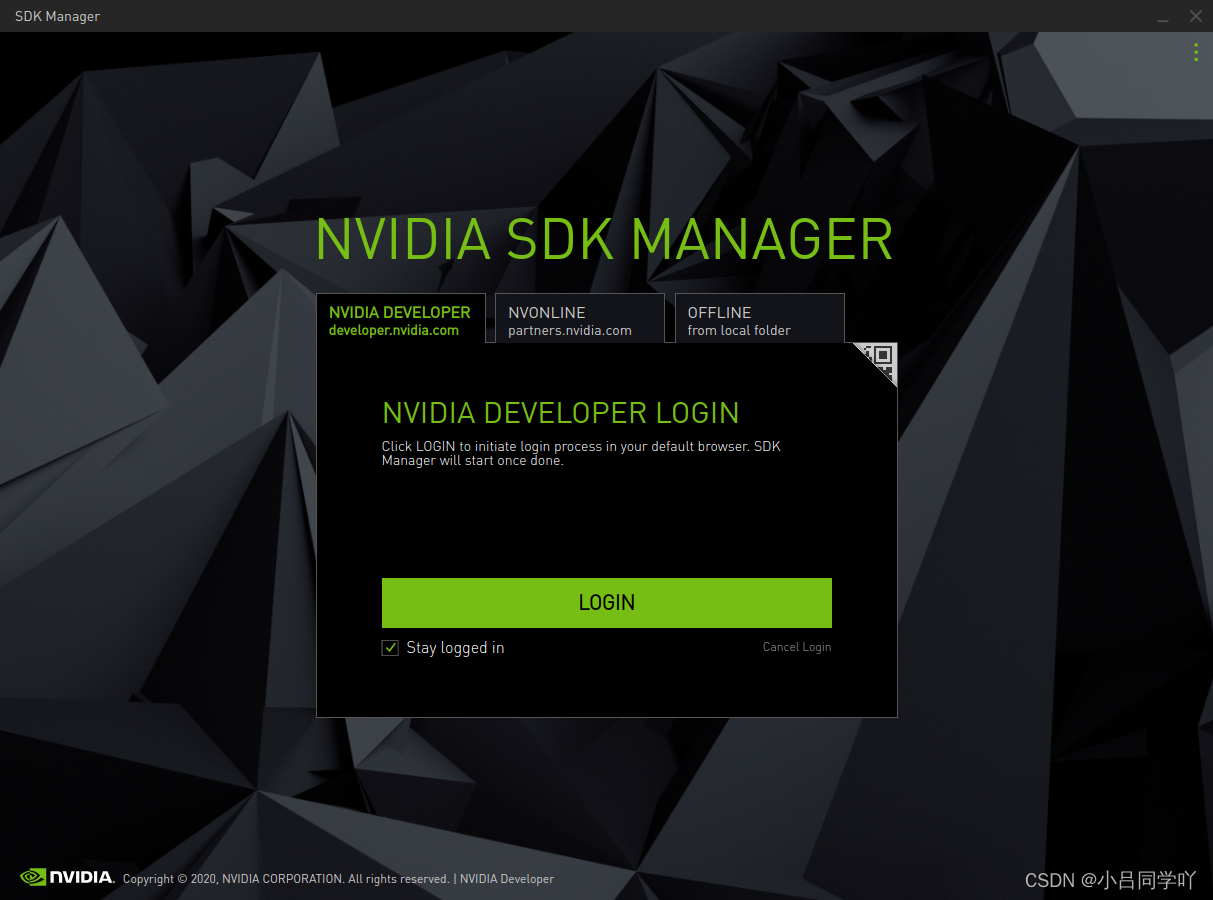
这里写自定义目录标题 烧录系统安装Jetpack 烧录系统 选择一台Linux系统,或者VMware的电脑作为主机,烧录系统和后面安装Jetpack都会用到。 根据供应商的指令烧录的,暂时还没验证官方烧录(后续验证补充)。 安装Jetpack 在主机安装SDK Manager,去Jetson Download下载,千万不要下官方给的最新版本(因为他们文档是以前写的,下载他们
NVIDIA Jetson TX1 系列开发教程之五:CAFFE安装与NVIDIA多媒体例程测试
NVIDIA Jetson TX1 系列开发教程之五:CAFFE安装与NVIDIA多媒体例程测试 转载请注明作者和出处:http://blog.csdn.net/u011475210嵌入式平台:NVIDIA Jetson TX1嵌入式系统:Ubuntu16.04虚拟机系统:Ubuntu14.04编者: WordZzzz 写在前面的前面: 之前就已经在实验室的深度学习服务器上安装过CA

NVIDIA Jetson TX1 系列开发教程之四:Nsight Eclipse Edition进阶
NVIDIA Jetson TX1 系列开发教程之四:Nsight Eclipse Edition进阶 转载请注明作者和出处:http://blog.csdn.net/u011475210嵌入式平台:NVIDIA Jetson TX1嵌入式系统:Ubuntu16.04虚拟机系统:Ubuntu14.04编者: WordZzzz 上一篇博文简单介绍了如何使用Nsight Eclip

NVIDIA Jetson TX1 系列开发教程之二:刷机与开发前准备
NVIDIA Jetson TX1 系列开发教程之二:刷机与开发前准备 转载请注明作者和出处:http://blog.csdn.net/u011475210嵌入式平台:NVIDIA Jetson TX1嵌入式系统:Ubuntu16.04虚拟机系统:Ubuntu14.04编者: WordZzzz 1. JetPack3.0下载与安装 本人PC端使用虚拟机安装Ubuntu14.04系统进

NVIDIA Jetson TX1 系列开发教程之一:开箱测试
NVIDIA Jetson TX1 系列开发教程之一:开箱测试 转载请注明作者和出处:http://blog.csdn.net/u011475210嵌入式平台:NVIDIA Jetson TX1嵌入式系统:Ubuntu16.04编者: WordZzzz 1. 概述 NVIDIA的Jetson TX1是嵌入式系统级模块(SoM),具有四核ARM Cortex-A57,4GB L
NVIDIA Jetson TX1 系列开发教程之十四:YOLO安装与优化加速
NVIDIA Jetson TX1 系列开发教程之十四:YOLO安装与优化加速 转载请注明作者和出处:http://blog.csdn.net/u011475210嵌入式平台:NVIDIA Jetson TX1嵌入式系统:Ubuntu16.04编者: WordZzzz NVIDIA Jetson TX1 系列开发教程之十四YOLO安装与优化加速 前言YOLO安装YOLO的优化加速

Jetson Orin Nano安装使用;cuda、pytorch安装;yolo使用
产品介绍 https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-orin/ 1、jtop工具安装 参考: https://blog.csdn.net/q839039228/article/details/126278528 安装jtop资源查看: sudo apt updatesudo a
Jetson Orin安装部署和使用(1)
Jetson Orin使用 一、 安装NVIDIA-jetpack和基础开发环境 1、修改deb source sudo bash -c 'echo "deb https://repo.download.nvidia.com/jetson/common r34.1 main" >> /etc/apt/sources.list.d/nvidia-l4t-apt-source.list'sudo

Nvidia Jetson/Orin +FPGA+AI大算力边缘计算盒子:潍柴雷沃智慧农业无人驾驶
潍柴雷沃智慧农业科技股份有限公司,是潍柴集团重要的战略业务单元,旗下收获机械、拖拉机等业务连续多年保持行业领先,是国内少数可以为现代农业提供全程机械化整体解决方案的品牌之一。潍柴集团完成对潍柴雷沃智慧农业战略重组后,潍柴雷沃智慧农业正式迈入新的发展阶段。聚焦智能农机与智慧农业两大战略业务,依托潍柴集团在液压电控、CVT动力总成、新能源、智能驾驶等新科技领域优势。 潍柴雷沃智慧