d455专题

ROS1 + Realsense d455 固件安装+读取rostopic数据
目录 安装固件(一定要匹配)ROS1 wrapper 安装方法Realsense SDK 安装方法Realsense Firmware 安装方法 修改roslaunch配置文件,打开双目图像和IMU数据其他坑点参考链接 安装固件(一定要匹配) 如果你是使用ROS1获取realsense数据的话,一定要注意,SDK, Firmware的版本不是越新越好!!,这是因为intel已经不

深度图的方法实现加雾,Synscapes数据集以及D455相机拍摄为例
前言 在次之前,我们已经做了图像加雾的一些研究,这里我们将从深度图的方法实现加雾展开细讲 图像加雾算法的研究与应用_图像加雾 算法-CSDN博客 接下来将要介绍如何使用深度图像生成雾效图像的方法。利用Synscapes数据集,通过读取EXR格式的深度信息,结合摄像机参数和暗通道先验等技术,计算传输图和大气光照强度,并应用朗伯-比尔定律生成雾效图像。文中提供了完整的代码示例,包括从深度图读取数
使用cv::ximgproc::FastBilateralSolverFilter优化realsense D455的深度图
1 源码 OpenCV中内置了很多滤波器,这里我们讨论cv::ximgproc其中包含的滤波器。 https://docs.opencv.org/3.4/da/d17/group__ximgproc__filters.html 需要注意的是,默认安装的OpenCV中不包含cv::ximgproc,请从源码重修编译。 在这里贴上我的测试源码。 /*cv::ximgproc::Adaptive
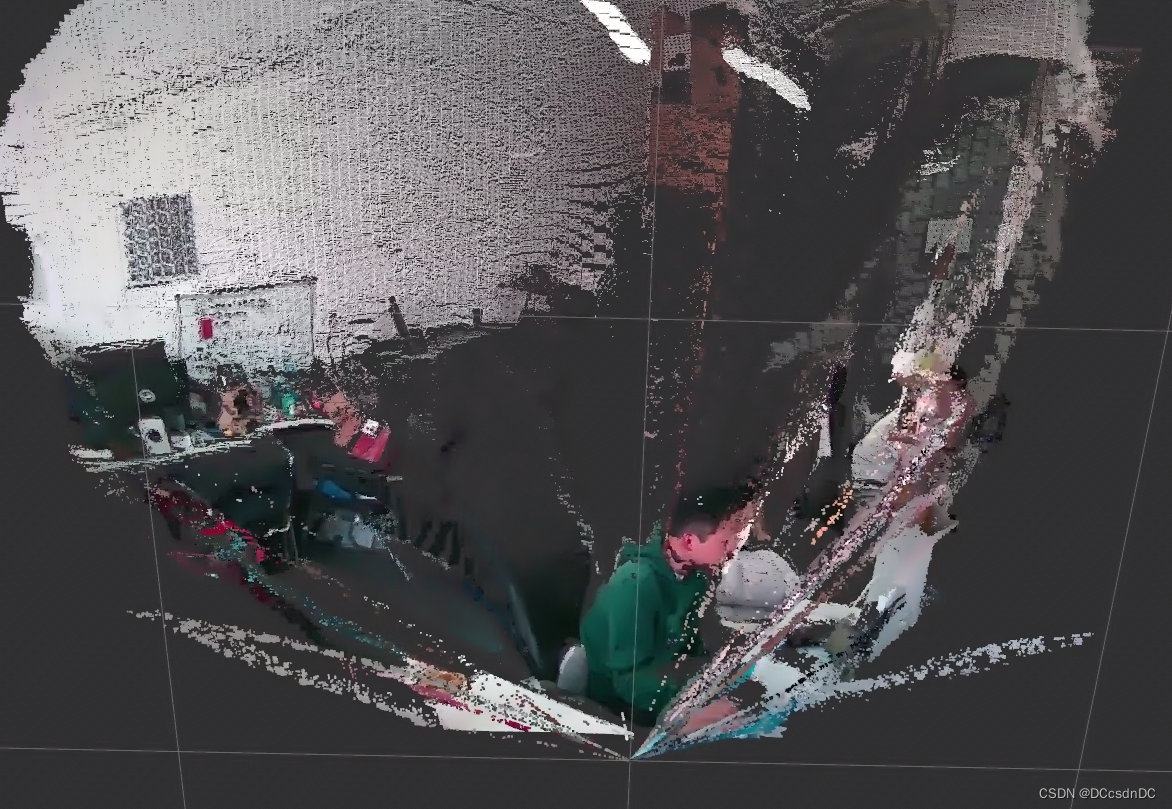
Realsence D455标定并运行Vins-Fusion
文章目录 一、双目相机标定1. 标定板准备1.1 打印标定板1.2 标定板信息原始pdf的格子参数是:调整后的格子参数是: 2. 左右目相机数据准备2.1 修改rs_camera.launch内容2.2 关闭结构光2.3 可视化双目图像2.4 修改相机播包帧数2.5 录制数据 3. kalibr 程序标定4. kalibr 标定结果 二、IMU标定1. 标定工具准备1.1 code_uti

【安装】Ubuntu上下 Intel Real Sence D455 的安装
Ubuntu上下 Intel Real Sence D455 的安装 1. Download SDK 下载源码,第一步先将librealsense的github下载下来: $ git clone https://github.com/IntelRealSense/librealsense.git 单独下载比git快,可能需要翻墙,否则很慢 安装依赖环境 $ sudo apt-ge
![[解决方法]realsence D455 在jetson nano 无法正常读取imu数据(/camera/imu、/camera/accel/sample)](https://img-blog.csdnimg.cn/5ed6f20ca0f5474a81f3aac2db96ae49.png)
[解决方法]realsence D455 在jetson nano 无法正常读取imu数据(/camera/imu、/camera/accel/sample)
hardware:jetsonnano myenv:官方提供的ubuntu18镜像 问题描述:d455 其余数据均能够正常显示,但是不论用realsence_viewer还是通过ros启动launch文件,均无法正常显示imu话题数据,和/camera/imu 、 /camera/accel/sample 都没有数据输出。 最终找到解决方案,亲测有效:感谢Unable to read IM
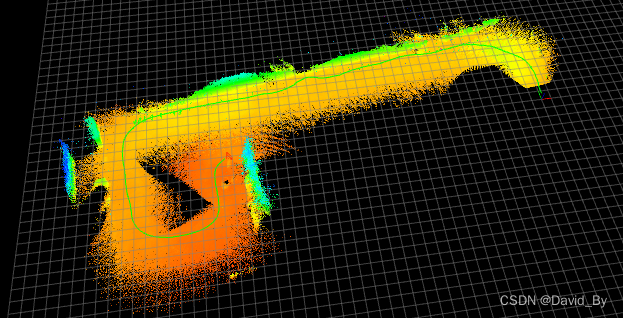
realsense d455 运行vins-mono,vins-rgbd
GitHub - STAR-Center/VINS-RGBD https://github.com/HKUST-Aerial-Robotics/VINS-Mono 读取realsense的内外参,也可以自己标定。 保证realsense-view安装成功,读取方法: 1.rs-enumerate-devices -c > realsense.txt Extrinsic from "Col

项目设计:YOLOv5目标检测+机构光相机(intel d455和d435i)测距
1.介绍 1.1 Intel D455 Intel D455 是一款基于结构光(Structured Light)技术的深度相机。 与ToF相机不同,结构光相机使用另一种方法来获取物体的深度信息。它通过投射可视光谱中的红外结构光图案,然后从被拍摄物体表面反射回来的图案重建出其三维形状和深度信息。 Intel D455 深度相机采用了结构光技术,能够获取高精度、高分辨率的深度图像和点云数据