camera专题

4-4.Andorid Camera 之简化编码模板(获取摄像头 ID、选择最优预览尺寸)
一、Camera 简化思路 在 Camera 的开发中,其实我们通常只关注打开相机、图像预览和关闭相机,其他的步骤我们不应该花费太多的精力 为此,应该提供一个工具类,它有处理相机的一些基本工具方法,包括获取摄像头 ID、选择最优预览尺寸以及打印相机参数信息 二、Camera 工具类 CameraIdResult.java public class CameraIdResult {

Android Camera系列(三):GLSurfaceView+Camera
人类的悲欢并不相通—鲁迅 Android Camera系列(一):SurfaceView+Camera Android Camera系列(二):TextureView+Camera Android Camera系列(三):GLSurfaceView+Camera 本系列主要讲述Android开发中Camera的相关操作、预览方式、视频录制等,项目结构代码耦合性低,旨在帮助大家能从

CameraManager——Camera的过时替代方法
CameraManager 用于检测,表征和连接的系统服务管理器 CameraDevices。 有关与相机设备通信的更多详细信息,请阅读相机开发人员指南或camera2 包文档。 此类的实例,必须使用能够获得Context.getSystemService(Class)与所述参数CameraManager.class或Context.getSystemService(String)使用参数Co
Android Camera系列(一):SurfaceView+Camera
心行慈善,何需努力看经—《西游记》 本系列主要讲述Android开发中Camera的相关操作、预览方式、视频录制等,项目结构代码耦合性低,旨在帮助大家能从中有所收获(方便copy :) ),对于个人来说也是一个总结的好机会 一. Camera操作 Android系统存在这么多年,google更新了不少API。光是对摄像头的操作目前就有3中API: android.hardware
Android Camera照相机
java代码: [java] view plain copy package com.Aina.Android; import java.io.BufferedOutputStream; import java.io.File; import java.io.FileNotFoundException; import java.io.FileOutpu

瑞芯微RK3588 camera驱动总结三调试
一、指令 先介绍一些很有用的指令 1.media-ctl -p -d /dev/media0 用于打印 /dev/media0 设备的媒体管道拓扑结构。媒体管道拓扑结构描述了多媒体设备内部各组件之间的连接关系,包括视频输入、视频输出、编码器、解码器、ISP(图像信号处理器)等组件之间的连接。 media-ctl -d /dev/media1 -e "rkisp_selfpath" med
Surfaceview调用Camera实现拍照
一、Surfaceview的使用 surfaceView的使用主要有三步:继承SurfaceView;获取SurfaceViewHolder;应用Holder更新展示内容。Surfaceview的应用有常用类型及数据展示的Demo。 拍照功能实现思路: <span style="font-size:18px;">1,依据布局,获取Surfaceview对象;2,获

《HarmonyOS开发 - IPC Camera开发笔记》第4章 HiSpark IPC Camera应用开发
4.1新建工程及配置 1.新建工程及源码 1> 新建目录 $ mkdir hello 在applications/sample/hello中新建src目录以及helloworld.c文件,代码如下所示。 #include <stdio.h>int main(int argc, char **argv){printf("\n");printf("\n\tHello OHOS!\n"

《HarmonyOS开发 - IPC Camera开发笔记》第3章 HiSpark IPC Camera源码编译与下载
开发环境: 开发系统:Ubuntu 20.04 开发板:HiSpark IPC Camera(Hi3518) 3.1 Harmony源码编译 Harmony在V1.1.1之后引入hb工具,因此不同的版本会有不同的编译方式。 3.1.1 Harmony V1.0编译 进入源码目录,执行以下命令: $ python build.py ipcamera_hi3518ev300 ipca

《HarmonyOS开发 - IPC Camera开发笔记》第2章 HiSpark IPC Camera开发环境搭建(基于V1.1.4)
开发环境: 开发系统:Ubuntu 20.04 Harmony版本:code-v1.1.4-LTS.tar HiSpark IPC Camera基于华为海思Hi3518芯片,支持LiteOS、OpenHarmony,广泛应用于智能摄像头、安防监控等场景。 本文将介绍如何搭建HiSpark IPC Camera开发环境,OpenHarmony主要在Linux平台上开发,因此需要使用Linux环境

《HarmonyOS开发 - IPC Camera开发笔记》第1章 HiSpark IPC Camera快速使用
1.1 HiSpark IPC Camera简介 HiSpark IPC Camera是基于华为海思Hi3518EV300芯片,支持LiteOS、HarmonyOS,实现图像采集识别功能,广泛应用于智能摄像头、安防监控、车载记录仪等。 参数如下: Hihope官网 关于Hihope IPC Camera的组装我就不赘述了,按照安装说明书一步步安装即可,也可到Hihope官网下载相应

2006-TOG - Removing camera shake from a single photograph
项目地址:https://cs.nyu.edu/~fergus/research/deblur.html 多尺度变分贝叶斯高斯混合模型用户选取区域及模糊核方向泊松重构中间图像Richardson-Lucy (RL)算法恢复最终图像(优势:速度快) 假设为一致性模糊(卷积操作 ⊗ \otimes ⊗的边界条件为非周期 non-periodic): B = K ⊗ L + N \bf B = K

论文阅读--Efficient Hybrid Zoom using Camera Fusion on Mobile Phones
这是谷歌影像团队 2023 年发表在 Siggraph Asia 上的一篇文章,主要介绍的是利用多摄融合的思路进行变焦。 单反相机因为卓越的硬件性能,可以非常方便的实现光学变焦。不过目前的智能手机,受制于物理空间的限制,还不能做到像单反一样的光学变焦。目前主流的智能手机,都是采用多摄的设计,一般来说一个主摄搭配一个长焦,为了实现主摄与长焦之间的变焦,目前都是采用数字变焦的方式,数字变焦相比于光学
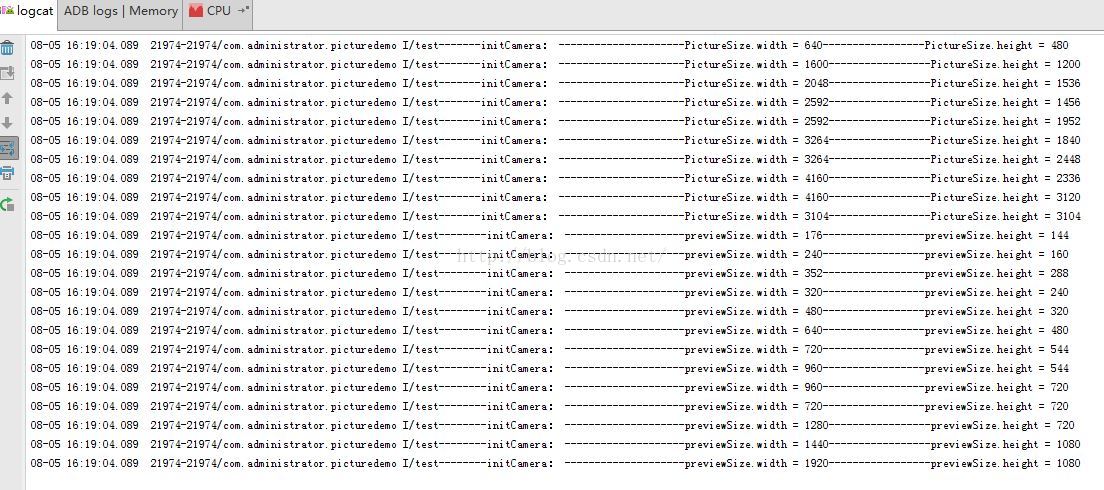
Android camera预览参数以及实际图像大小设置
参考一下两篇博文: http://www.cnblogs.com/skyseraph/archive/2012/03/26/2418665.html http://blog.csdn.net/yanzi1225627/article/details/7738736 #####################################################
threejs 获取视角 设置视角 camera OrbitControls
获取视角 function getCurrentView() {let position = this.camera.position;let target = this.orbitControls.target;console.log('x:' + position.x.toFixed(2) + ',' + 'y:' + position.y.toFixed(2) + ',' + 'z:' +

Apollo camera 感知部分 目标检测源码阅读分析
障碍物检测分为detector transformer postprocessor tracker几个部分 kitti 基于单目的3D目标检测的预备知识点: 首先是yolo3d 3d目标检测输出结果为kitti的3D格式,(其中3d信息部分是以相机坐标系为参考坐标系的) 首先介绍下kitti 3d object detection障碍物标注的的标注文件格式 KITTI数据集,label文件
使用Camera Calibration Toolbox for Matlab进行摄像机标定
Camera Calibration Toolbox for Matlab: http://www.vision.caltech.edu/bouguetj/calib_doc/ 一些摄像机标定的Matlab工具箱(含Kinect和激光):http://blog.exbot.net/archives/60 kinect深度图与摄像头RGB的标定与配准:http://m.blog.csdn
太速科技-FMC213V3-基于FMC兼容1.8V IO的Full Camera Link 输入子卡
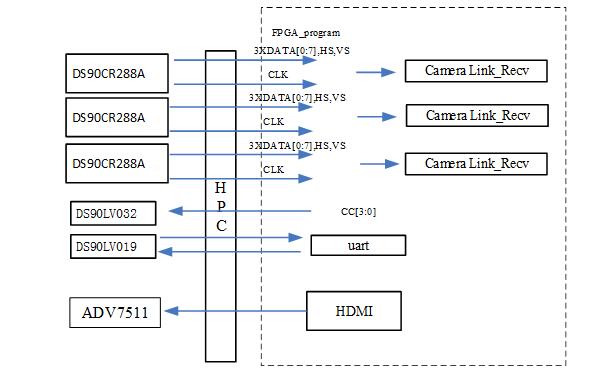
FMC213V3-基于FMC兼容1.8V IO的Full Camera Link 输入子卡 一、板卡概述 该板卡为了考虑兼容1.8V电平IO,适配Virtex7,Kintex Ultrascale,Virtex ultrasacle + FPGA而特制,如果要兼容原来的3.3V 也可以修改硬件参数。板卡支持1路Full Camera link输入,同时支持1路H

汽车IVI中控开发入门及进阶(二十七):车载摄像头vehicle camera
前言: 在车载IVI、智能座舱系统中,有一个重要的应用场景就是视频。视频应用又可分为三种,一种是直接解码U盘、SD卡里面的视频文件进行播放,一种是手机投屏,就是把手机投屏软件已视频方式投屏到显示屏上显示,另外一种就是对视频采集设备(主要就是摄像头Camera)的视频源进行解析解码显示。随着汽车智能化大趋势的演进,车载摄像头也是越来越多,所以对于这一块的视频处理需求也就越来越旺盛。 根据安装
Kaggle-Camera_Model_Identification 比赛记录总结[19/582(Top 4%)]
这篇博客记录自己在这次kaggle比赛中做的工作。成绩:19/582(Top 4%) Kaggle比赛地址 我的代码github地址 这次比赛是给出10个相机拍摄的照片,然后给出测试图片,区分是哪个相机拍摄的。训练集中每类照片数量相同,每类都是由同一个手机拍摄的照片。测试集中,每类的照片都是来自另外一个手机,一半的图片可能被用了八种可能的操作。 总结: 1. 更多的数据。
![模块[camera]_变焦与对焦(转自csdn)](http://hi.csdn.net/attachment/201110/30/0_1319959880Ll5n.gif)
模块[camera]_变焦与对焦(转自csdn)
转自:http://blog.csdn.net/lizhiguo0532/article/details/6918849#comments 声明:此原创非彼原创,资料来源于网络,只是经过加工整理罢了。如果引用了你的资料并没有说明出处,敬请原谅!仅供学习参考。 一、变焦 通常指通过移动镜头内的透镜镜片位置来拉长或缩短焦距,也叫ZOOM。
模块[camera]_摄影基础知识: 曝光补偿完全指南
转自:http://hd3g.gxnews.com.cn/viewthread.php?t=7410090 摄影基础知识: 曝光补偿完全指南 作者:苞谷汁儿[1楼] 用过数码相机的朋友也许会注意到一个细节,在相机的手册里或者菜单里都可以发现一个叫“EV”的可变参数,EV就是曝光补偿,这个不起眼的EV参数你会使用吗?什么是“曝光补偿”的含义呢?这就是本文所要讲的主题。
模块[camera]_ISP与DSP的区别
ISP 是Image Signal Processor 的简称,也就是图像信号处理器。而DSP是Digital Signal Processor 的缩写,也就是数字信号处理器。 ISP一般用来处理Image Sensor(图像传感器)的输出数据,如做AEC(自动曝光控制)、AGC(自动增益控制)、AWB(自动白平衡)、色彩校正、Lens Shading、Gamma 校正、祛除坏点、A
模块[camera]_RGB/HSV/YUV颜色空间模型总结
转自:http://blog.sina.com.cn/s/blog_679741950100ivz0.html 颜色通常用三个相对独立的属性来描述,三个独立变量综合作用,自然就构成一个空间坐标,这就是颜色空间。而颜色可以由不同的角度,用三个一组的不同属性加以描述,就产生了不同的颜色空间。但被描述的颜色对象本身是客观的,不同颜色空间只是从不同的角度去衡量同一个对象。
模块[camera]_关于光源色温与标准光源的讨论
转自:http://hi.baidu.com/baodao/item/1a372cd04eae86312b35c701 以绝对温度K来表示,即将一标准黑体加热,温度升高到一定程度时颜色开始由深红-浅红-橙黄-白-蓝,逐渐改变,某光源与黑体的颜色相同时,我们将黑体当时的绝对温度称为该光源之色温。 因相关色温度事实上是以黑体辐射接近光源光色时,对该光源光色表现的评价值,并非一种精确的颜色
![模块[camera]_camera调试工具](http://file.52rd.com/UploadFile_DKLEI28dL/2007-11/071113@52RD_colorview.jpg)
模块[camera]_camera调试工具
转自:http://www.52rd.com/bbs/Dispbbs.asp?BoardID=86&ID=69390 一、ISO12233 Camera Resolution Chart ISO12233分辨率测试标板遵照ISO12233的标准“摄影-电子照相画面-衡量方法"。这个测试标板在1 X 大小的这个活动区域,测量20 cm 高度只有约0.1毫米的误差。他具有几乎大部分解