ceres专题

Ubuntu中PCL、Eigen、ROS、Ceres、VScode相关操作,安装,卸载,文件存储位置基础合集
Ubuntu中PCL相关操作 查看PCL对应的版本号 apt-cache show libpcl-dev 卸载PCL相关命令 sudo apt-get remove libpcl-dev 如果想要完全卸载相关软件包及其配置文件,需要加上--purge参数: sudo apt-get --purge remove libpcl-dev Ubuntu中eigen相关操作 ubunt

Ceres-Solver 从入门到上手视觉SLAM位姿优化问题
概述 欢迎访问 https://cgabc.xyz/posts/740ecb50/,持续更新。 Ceres Solver is an open source C++ library for modeling and solving large, complicated optimization problems. 使用 Ceres Solver 求解非线性优化问题,主要包括以下几部分:

Windows环境下编译Ceres
1. 下载ceres稳定版本ceres-solver-1.14.0 2. 解压进入jni目录,修改Application.mk文件 #APP_BUILD_SCRIPT := $(call my-dir)/Android.mk#APP_PROJECT_PATH := $(call my-dir)APP_CPPFLAGS += -fexceptionsAPP_CPPFLAGS += -frtt

cartographer ceres后端优化
这里引用一篇文章 https://zhuanlan.zhihu.com/p/567635409 因为cartographer中的代码有的地方添加了AddParameterBlock,有的地方没有添加,会引起歧义,原来AddParameterBlock可以隐式添加优化变量,这篇文章介绍了具体原因,核心内容如下: AddParameterBlock的作用 作用一:用户可以选择使用Problem:
VS2013+64位win7系统ceres solver编译教程
Ceres Solver是由Google开发的非线性最小二乘问题求解工具包,VS下虽然可以使用别人编译好的ceres.sln文件,虽然这样相对简单,但是可能会因为个人机器环境、软件配置的不同而无法使用。所以配置Ceres最好的方法是使用cmake工具生成自己的Ceres.sln。 使用ceres必备的库有eigen、glog和gflags三个,附下载地址 Ceres最新版本ceres-solv
Ceres 源码阅读之 TrustRegionMinimizer::Minimize 函数简析
文章目录 Part.I IntroductionPart.II 源码剖析Chap.I TrustRegionMinimizer 类介绍Chap.II Minimize 函数介绍 Part.I Introduction Ceres 中求解优化问题的迭代求解方法(minimizer_type)有线性搜索方法(LINEAR_SEARCH)、信赖域方法(TRUST_REGION)等,其
Ceres Power与斗山签署韩国市场合作与许可协议
Ceres和斗山将合作开发用于商业建筑市场的固体氧化物燃料电池(SOFC)电力系统该协议为Ceres带来两年800万英镑的价值韩国是世界领先的燃料电池市场之一,斗山已成为世界最大的燃料电池电力系统开发商之一 英格兰霍舍姆--(美国商业资讯)--世界领先的下一代低成本燃料电池技术开发商Ceres Power和斗山公司(Doosan Corporation)已签订一份合作和许可协议,共同开发最
SLAM本质剖析-Ceres
转载自:https://mp.weixin.qq.com/s/fKlG9LWlPI52wStUAv18iw SLAM本质剖析-Ceres 原创 lovely_yoshino 古月居 今天 在了解SLAM的原理、流程后,个人经常实时困惑该如何去从零开始去设计编写一套能够符合我们需求的SLAM框架。作者认为Ceres、Eigen、Sophus、G2O这几个函数库无法避免,尤其是Ceres函数

ceres solver 学习笔记
概述 Ceres Solver 是一个为大型复杂优化问题建模并解算的开源C++库。它是一个内容丰富,成熟高效的库,自2010年以来已经应用于Google的产品之中。Ceres Solver 可以解决两类问题。 1.带约束的非线性最小二乘问题。 2.一般无约束优化问题。 基本概念 以上方程即为一个带
实践:Ceres BA(1)
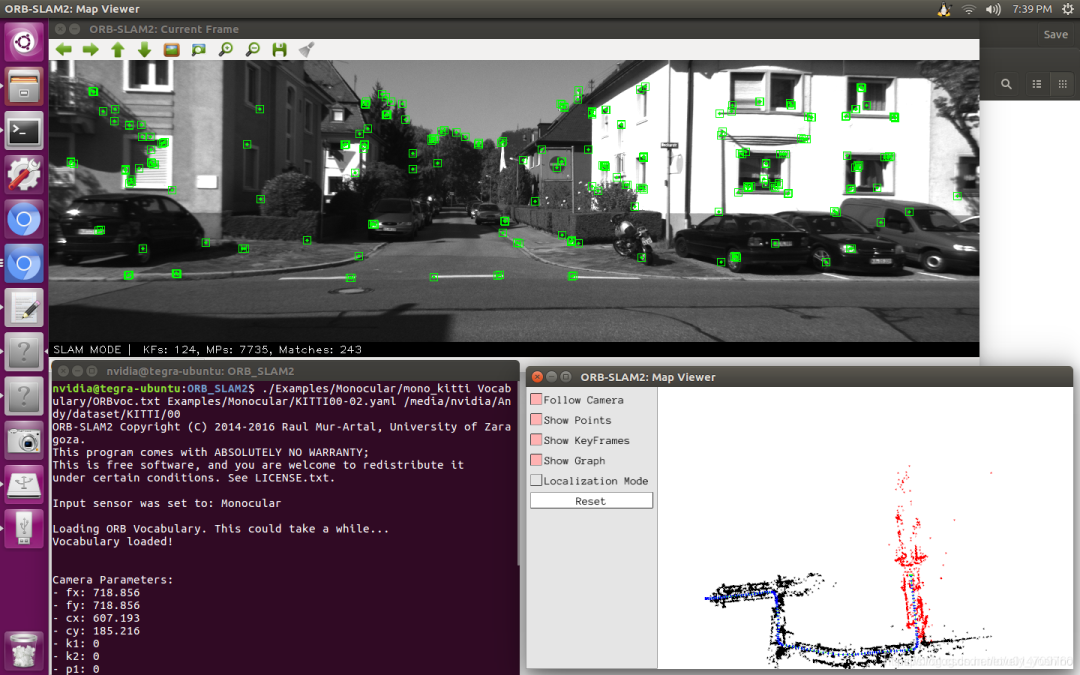
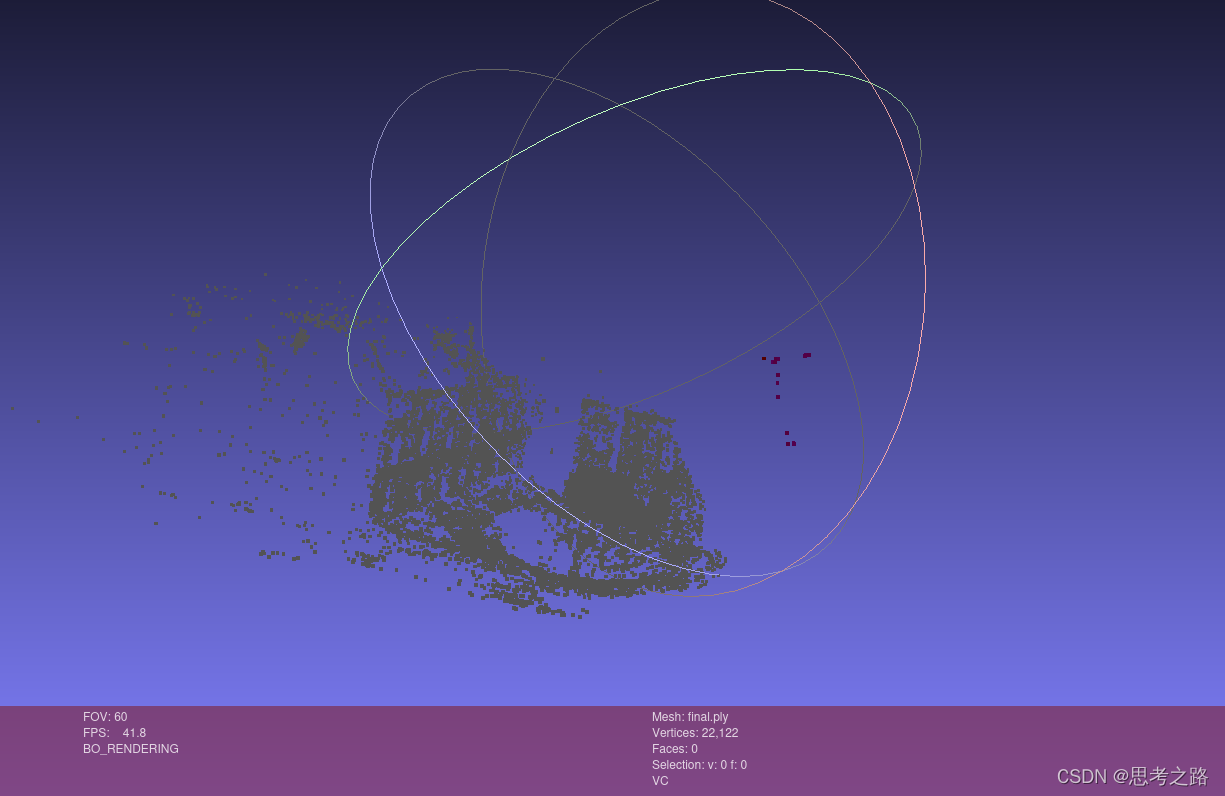
1.Ceres BA 我们用BAL数据集进行BA,一个场景中的路标和相机位姿由文本给定,具体格式见:http://grail.cs.washington.edu/projects/bal,使用common.h中定义的BALProblem类读入该文件的内容,然后分别用Ceres和g2o求解 我们对要求看完后,对代码的结构进行由框架到内部细节的实现,流程分析过程如下: int main(int
依赖库:Ceres-solver-2.0.0安装
依赖库:Ceres-solver-2.0.0安装 前言安装ceres-solver-2.0.0验证 前言 Ceres Solver是谷歌开源的C++非线性优化库,能够解决有约束或无约束条件下的非线性最小二乘问题。2010年之后大量的运用在谷歌的产品开发中,尤其在谷歌开源的cartographer中被大量的使用。 ceres可以在Linux,Windows,macOS,Andri

![Missing requested Ceres components: [SuiteSparse]](/front/images/it_default.jpg)
Missing requested Ceres components: [SuiteSparse]
编译nav2的源码时候,在编译smac_planner的时候出现找不到ceres里面的SuiteSparse,具体提示如下: Starting >>> smac_planner--- stderr: smac_planner CMake Error at /usr/local/lib/

自学SLAM(7)非线性优化实践:曲线拟合问题(使用ceres库和SLAM常用的g2o库)
前言 本次文章针对的是第四个视屏中的实践问题 肯定会有部分方法没有说到,比如高斯牛顿法,后面我会把此次视屏对应的作业写好,然后补充到此次博客!! 文章目录 前言1.曲线拟合题目:2.非线性最小二乘2.1 黄金分割法(0.618法)2.2 最速下降法 3.ceres库实现曲线拟合题目3.1 安装ceres3.2 代码及运行 4.g2o库实现曲线拟合题目4.1 安装g2o4.2

DCOREUM生态项目Ceres DAO早鸟计划正式售罄
随着DCOREUM产品和生态的进一步完善,DCOREUM去中心化商业网络的首个生态项目Ceres DAO于2023年3月11日开启了早鸟计划,截止目前已经全部售罄,没有抢到额度的部分将原路返回。 Ceres DAO是基于Web3去中心化数字资产管理协议,是DCOREUM生态里的投资DAO。Ceres DAO投资范围覆盖一级和二级市场,通过α+β的组合投资策略,让资产的稳健增值和超额收益完美结
《视觉 SLAM 十四讲》V2 第 6 讲 非线性优化 【高斯牛顿法、列文伯格-马夸尔特方法 、Ceres 库 和 g2o库 】
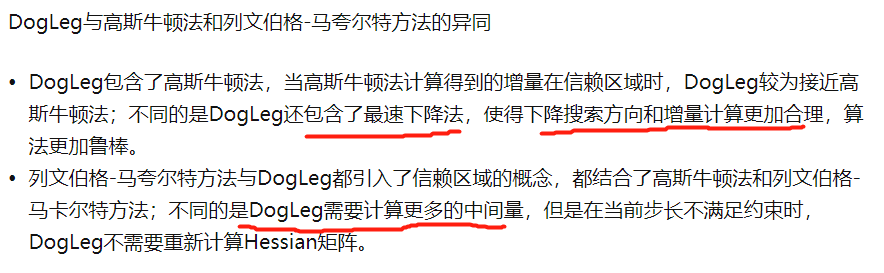
文章目录 6.1.2 最小二乘 寻找下降增量 Δ x k \Delta\bm{x}_k Δxk的 4 种方法6.2.1 一阶和二阶梯度法(最速下降法、牛顿法)6.2.2 高斯牛顿法6.2.3 列文伯格-马夸尔特方法 【阻尼牛顿法】【信赖区域法】 6.3 实践6.3.1 手写高斯牛顿法 【Code】本讲 CMakeLists.txt 6.3.2 谷歌的优化库 Ceres 【最小二乘问题求
ceres做slam全局优化的一些体会
之前讲到了如何用ceres做相邻两帧的ba优化,是用重投影误差来做的,对于连续的数据流,无论你在前端采用什么样的代数算法pnp或者icp其实都只能算出一个粗略的解,博主亲自做实验来比较代数解和非线性优化解的区别,发现无论怎样,即使我ba给的初值相当垃圾,优化出来的结果一样好于代数解。那么对于长时间的slam问题来说,如何保证可以减少随时间产生的累计误差,一种主流的做法是把我所以看到的关键帧中的ma

Ceres-solver学习笔记-pose_graph_2d.cc
[本节官方教程链接🔗](http://ceres-solver.org/nnls_tutorial.html#f9)pose_graph_2d.cc针对SLAM问题中的位姿图优化问题,如下,三角点xi表示物体的状态,边zij表示观测,即xi和xj之间的约束,实线边表示两个状态之间是序列性的(sequential ),虚线则表示非序列性即闭环的两帧之间的约束。 其中,x由一个表示平移的
Ceres-Solver 官网教程翻译与学习
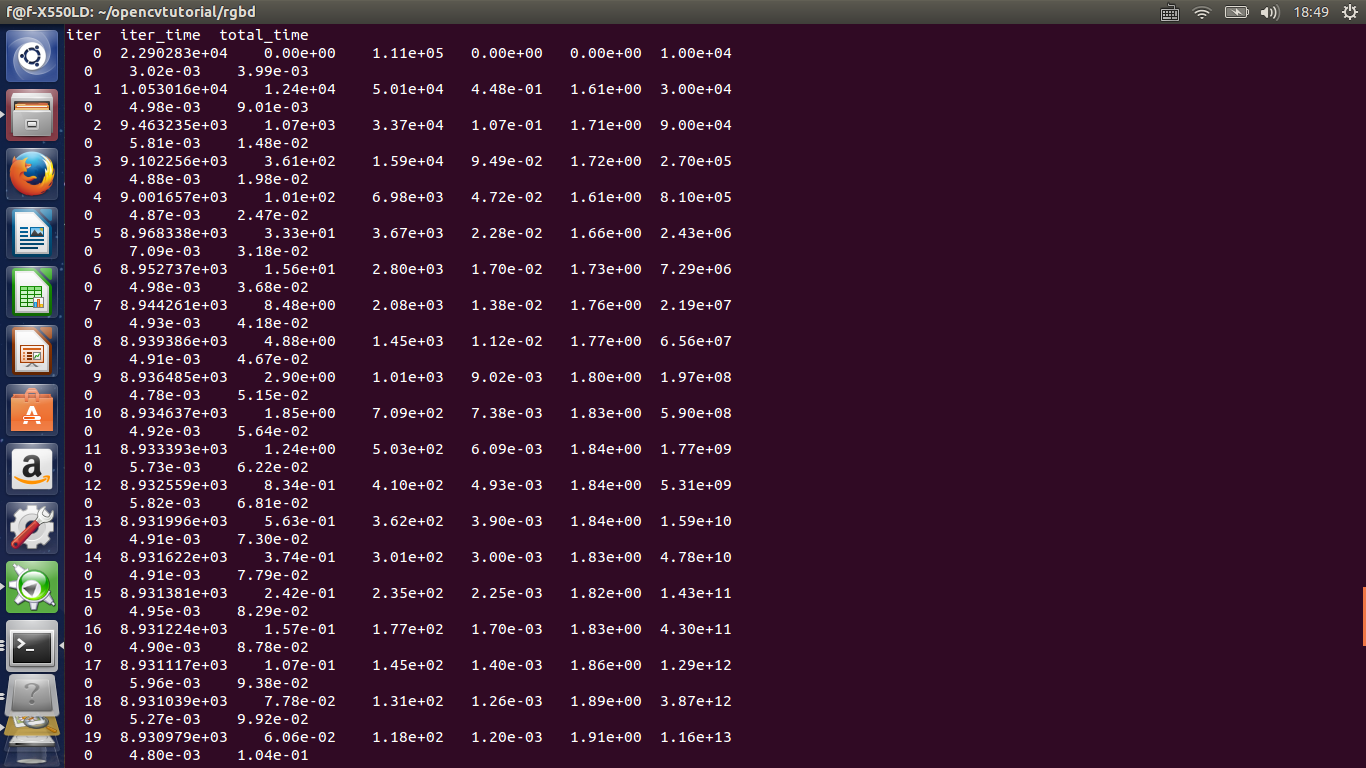
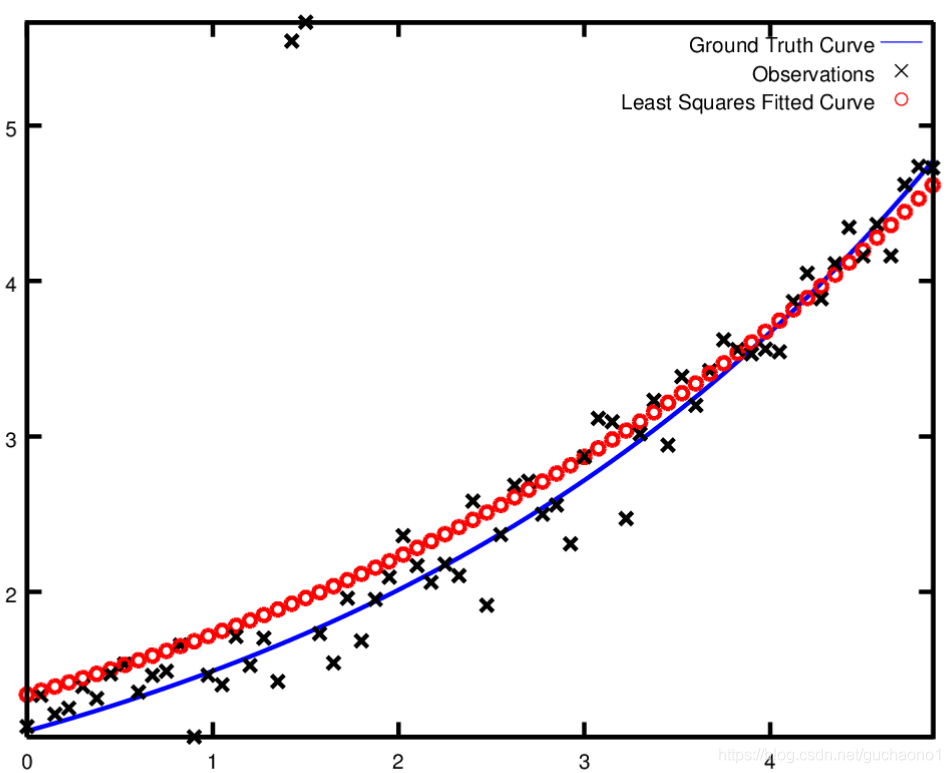
Ceres-Sovler 仿函数(预备知识)Ceres最小二乘问题 Hello World导数(derivatives)数值微分(Numerical Derivatives)解析法求导(Analytic Derivative) Powell's FunctionCurve FittingRubust Curve Fitting 鲁棒曲线拟合Bundle Adjustment让我们来求解[BA

VS2015+windows10编译配置Ceres库
文章目录 一、准备工作:软件下载二、实现过程三、实现效果参考资料 一、准备工作:软件下载 1、cmake:是一种跨平台的编译工具,它可以应用于Windows、Linux等系统 2、VS2015:这就不用怎么介绍了,使用很广泛的一个软件。 3、Eigen:一个矩阵库,Ceres官方建议下载3.3版本及之上的Eigen包。 4、glog:在Ceres中,glog被广泛用于记录关于内
![[环境]Ubuntu20.04安装Ceres](https://img-blog.csdnimg.cn/d33a9b2812864942bdd6fe8c8eefdbfa.png)
试用ceres写一个拟合
//拟合函数: y=ax^4+bx^3+cx^2+dx+e#include <iostream>#include <opencv2/core/core.hpp>#include <ceres/ceres.h>struct function_residual{function_residual(double x_, double y_) : x(x_), y(y_){}template<typ
《视觉 SLAM 十四讲》V2 第 6 讲 非线性优化 【高斯牛顿法、列文伯格-马夸尔特方法 、Ceres 库 和 g2o库 】
文章目录 6.1.2 最小二乘 寻找下降增量 Δ x k \Delta\bm{x}_k Δxk的 4 种方法6.2.1 一阶和二阶梯度法(最速下降法、牛顿法)6.2.2 高斯牛顿法6.2.3 列文伯格-马夸尔特方法 【阻尼牛顿法】【信赖区域法】 6.3 实践6.3.1 手写高斯牛顿法 【Code】6.3.2 谷歌的优化库 Ceres 【最小二乘问题求解库】【Code】6.3.3 g2o(