本文主要是介绍【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、项目介绍
使用RX806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划。

实物图
二、涉及相关算法
1.单腿运动学逆解
控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动
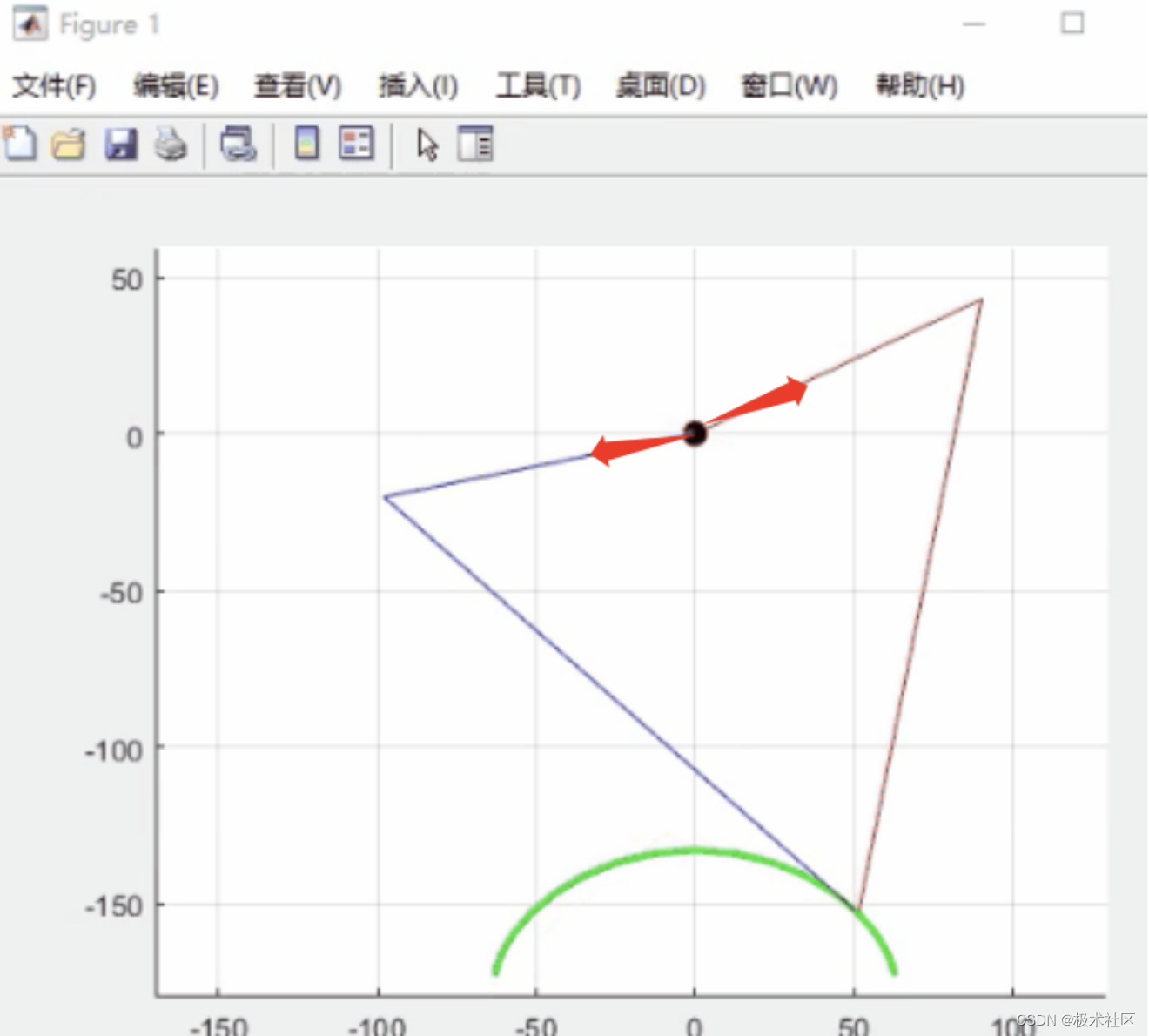
%摆线方程(matlab)
sigma=2*pi*t/(Ts);
xep=(xf-xs)*((sigma-sin(sigma))/(2*pi))+xs;
zep=h*(1-cos(sigma))/2+zs;
x=[x,xep];
z=[z,zep];
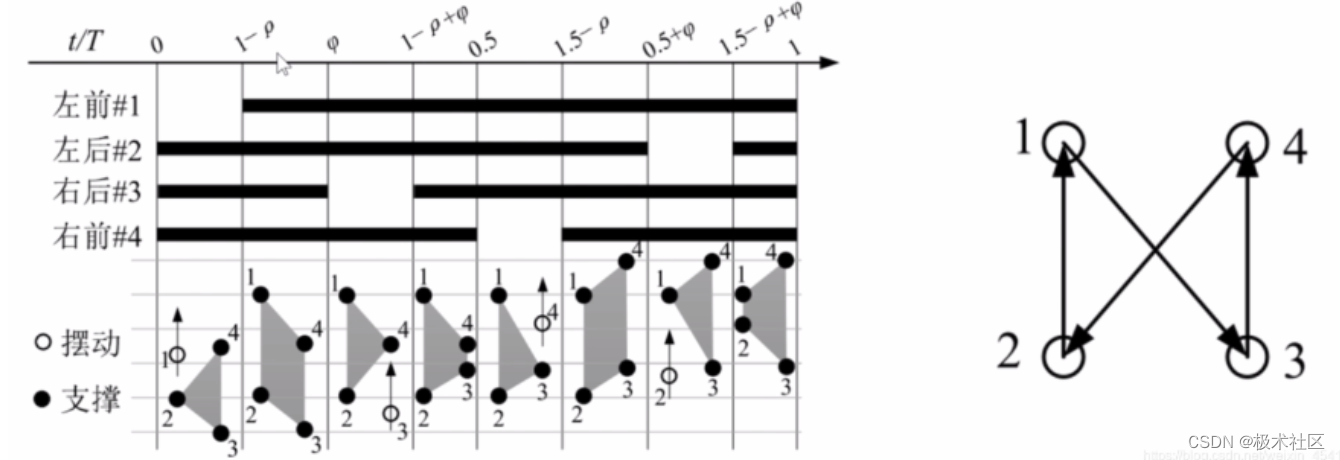
2.步态规划(目前主要采用wark步态)
Walk步态是一种静态步态,即在运动过程中始终有三条腿处于支撑相,至多只有一条腿处于摆动相,四足动物在walk步态中四条腿最常见的轮换顺序为1→3→4→2→1。
3.无刷电机角度速度pid闭环
以P比例、I积分、D微分通过增量式PID使无刷电机能稳定的控制速度
角度使用pd控制函数如下
int Balance(float Angle,float Gyro,int Middle,float Balance_Kp,float Balance_Kd)
{
float Angle_bias,Gyro_bias;
int balance;
Angle_bias=Middle-Angle;
Gyro_bias=0-Gyro;
balance=Balance_KpAngle_bias+Gyro_biasBalance_Kd;
return balance;
}
三、代码实现
XR806:
初始化串口配置:
static int uart_init(void)
{UART_InitParam param;param.baudRate = 115200;param.dataBits = UART_DATA_BITS_8;param.stopBits = UART_STOP_BITS_1;param.parity = UART_PARITY_NONE;param.isAutoHwFlowCtrl = 0;if(HAL_UART_Init(UARTID, ¶m) != HAL_OK)return -1;/*使能DMA*/if (HAL_UART_EnableTxDMA(UARTID) != HAL_OK)return -2;if (HAL_UART_EnableRxDMA(UARTID) != HAL_OK)return -3;return 0;
}
在main函数中while循环用下列函数发送对应数据
HAL_UART_Transmit_DMA(UARTID, (uint8_t *)buffer,sizeof(buffer));
在stm32中串口3接收回调,执行难对应的前进后退
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART3){HAL_UART_Receive_IT(&huart3,&RxBuffer_control,1);switch(RxBuffer_control){case 'W': Motor_Control( 1, 1, 1, 1); break;case 'S': Motor_Control(-1, -1, -1, -1); break;case 'A': Motor_Control(-1, -1, 1, 1); break;case 'D': Motor_Control( 1, 1, -1, -1); break;case 'P': Motor_Control( 0, 0, 0, 0); break;}
}
四、实物展示
1.原地
https://www.youku.com/video/XNjEwMjAzMzk3Ng==
2.全方位运动
https://www.youku.com/video/XNjEwMjA0MDA1Ng==
这篇关于【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






