单腿专题
【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划
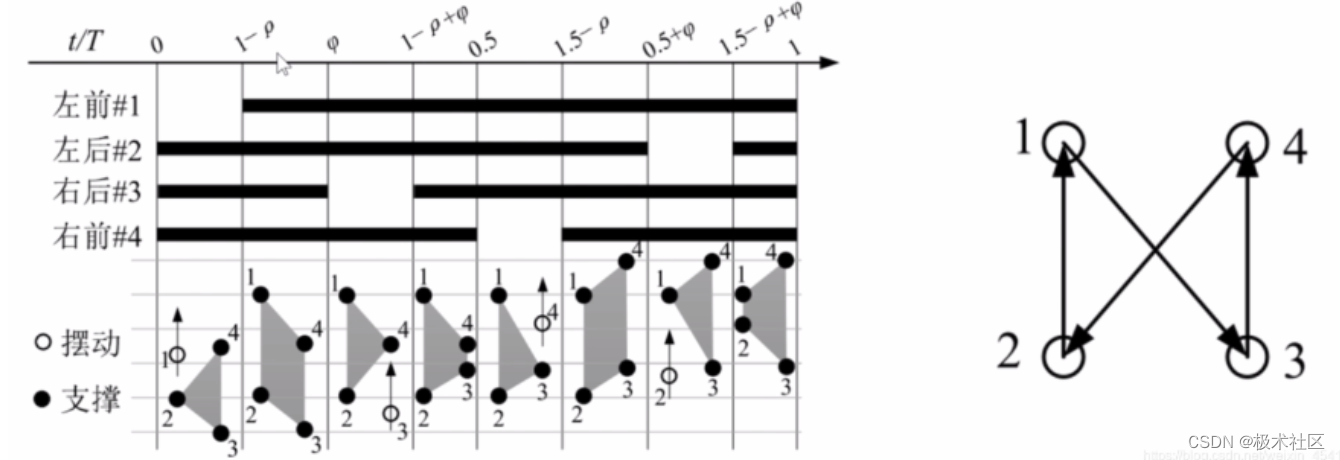
一、项目介绍 使用RX806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划。 实物图 二、涉及相关算法 1.单腿运动学逆解 控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动 %摆线方程(matlab