并联专题

TL431精密可调并联稳压器
TL431是一种由德州仪器(TI)公司生产的可调精密并联稳压器,具有较广的工作电压范围(2.5V-36V)和优异的电流调节能力。作为一种基准电压源,它广泛用于电源设计、稳压电路以及精密参考电源等应用场合。 TL431的内部结构 TL431具有三个引脚:阴极、阳极和参考端(REF),其中参考端的基准电压为2.5V。内部由多级放大电路、补偿电路和保护电路组成,具有高精度和稳定的基准电压输出功能。
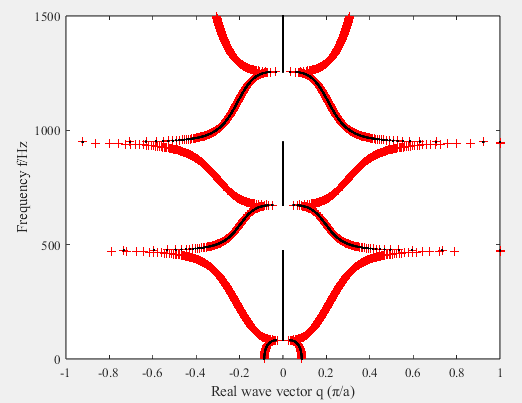
Matlab 并联双振子声子晶体梁结构带隙特性研究
参考文献:吴旭东,左曙光,倪天心,等.并联双振子声子晶体梁结构带隙特性研究[J].振动工程学报,2017,30(01):79-85. 为使声子晶体结构实现范围更宽的多带隙特性,基于单振子型声子晶体结构弯曲振动带隙频率范围窄的局 限,提出了一种双侧振子布置形式的局域共振声子晶体梁结构,并基于传递矩阵法和有限元法对其进行了无限周 期和有限周期的带隙计算,分析了双带隙配合减振的特性;试制了声子

Webots并联四足机器人仿真
并联四足机器人仿真: 1.机器人整机仿真: 1)基于位置控制&PID算法&运动学逆解 2)足端轨迹:摆线 3)步态:Trot步态,转向步态,跳跃(跳跃,跳转,猫跳,后空翻) 并联单腿仿真: 一条并联单腿模型+控制器代码(验证位置控制和运动学逆解,足端轨迹) 版本:webots R2021b vx:LibFreeCx330,csdn私信我可能无法及时看到 四足机器人 vx:

高效多相并联双路18A或单路36A输出替代LTM4630
特性 双输出 18A 或单输出 36A宽输入电压范围:4.5V 至 15V输出电压范围:0.6V 至 1.8V在整个电压、负载和温度范围内具有 ±1.5% 的最大总 DC 输出误差差分远端检测放大器电流模式控制 / 快速瞬态响应可调开关频率过流折返保护利用多个 PCD86BAK30 实现多相并联均流 (高达 144A)频率同步内部温度监视器可选的突发模式 (Burst Mode®) 操作软起动

【Matlab】非对称3-SPR并联机器人正逆运动学
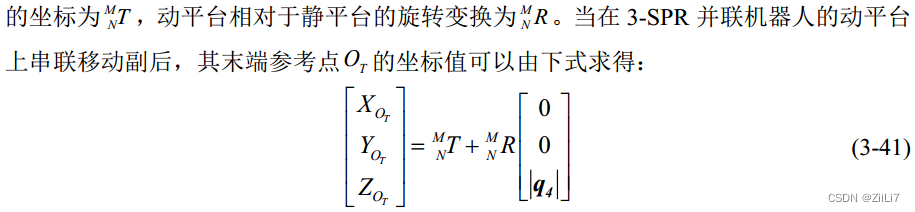
省流说明:本文提供球铰的非对称布置情况下其正逆运动学的求解,但需要有额外的输入参数 文章目录 3-SPR并联机器人的运动学模型逆运动学求解正运动学求解(待更新补充说明) 3-SPR并联机器人的运动学模型 S:球铰 P:移动副 R:转动副 3-SPR并联机器人即包含三条独立的SPR运动支链 输入:三个移动副(P)的伸长量 输出:系统末端参考点(一般是动平台的中心点) 运动学模型
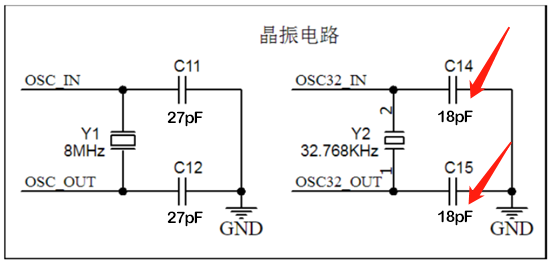
晶振电路的并联电阻有什么用?
在晶振电路中,并联电阻是一个很重要的元器件,它和石英晶体谐振器并联连接。并联电阻的作用有以下几点: 1.频率调节 并联电阻可以调整晶振电路的频率。当并联电阻的值变化时,会影响到电路的阻抗,从此改变石英晶体谐振器的振动的频率。通过调节并联电阻的值,能够对晶振电路的频率进行微调,让其精确地保持在所需要的频率上。 2.改善电路性能 并联电阻能够改善晶振电路的性能。在晶振电路中,由于石英晶体谐振器
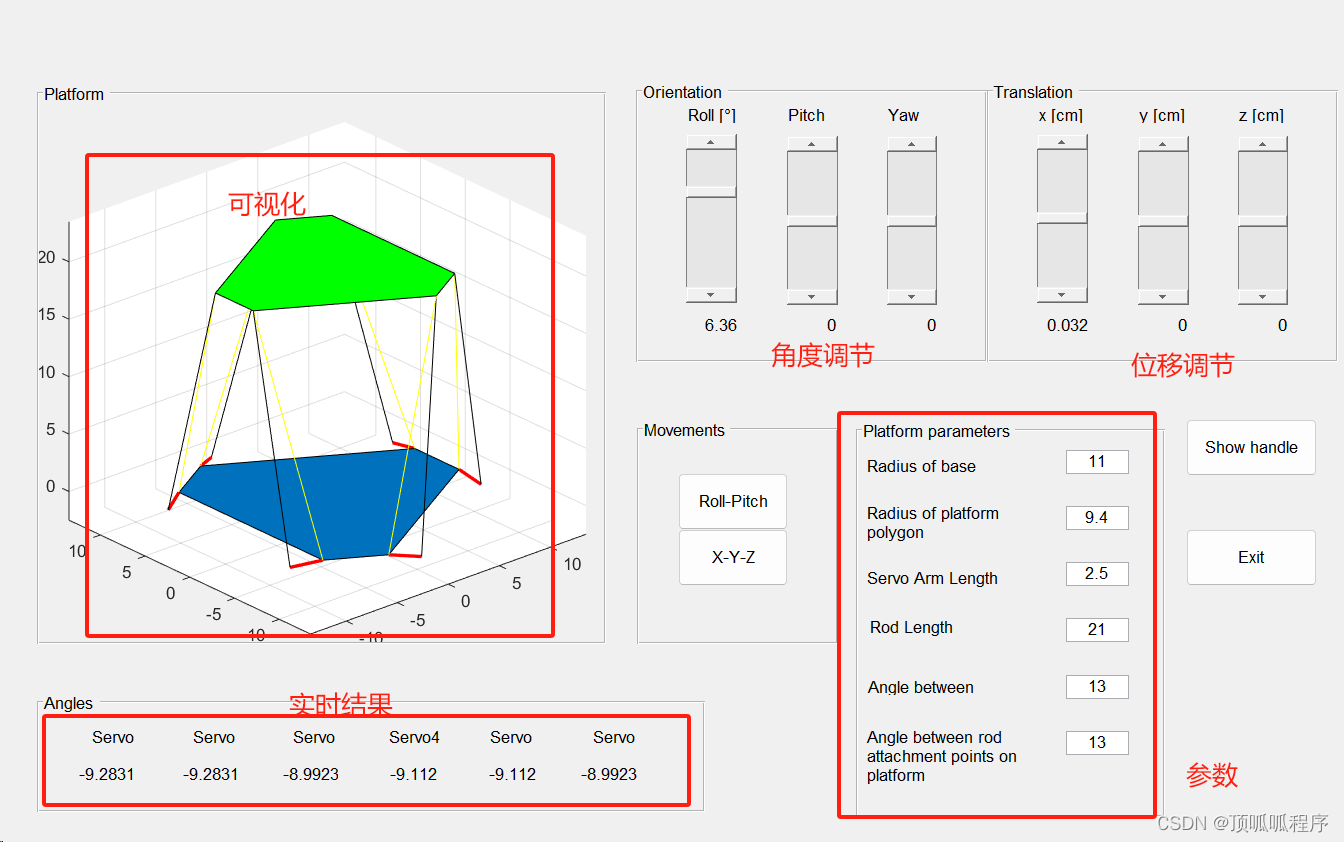
168基于matlab的六自由度并联摇摆台的反解控制算法
基于matlab的六自由度并联摇摆台的反解控制算法,stewart平台,配有GUI界面,可以自定义角度,杆长等参数。设定动平台位姿即能得到电机参数。程序已调通,可直接运行。 168 六自由度并联摇摆台 反解控制算法 (xiaohongshu.com)

【电路笔记】-并联电感
并联电感 文章目录 并联电感1、概述2、并联电感示例13、互耦并联电感器4、并联电感示例25、并联电感示例36、总结 当电感器的两个端子分别连接到另一个或多个电感器的每个端子时,电感器被称为并联连接在一起。 1、概述 所有并联电感器上的压降将是相同的。 然后,并联的电感器两端有一个公共电压,在下面的示例中,电感器两端的电压如下: V L 1 = V L 2 = V L
运放反馈电阻上并联小电容的作用
这是一个同相比例运算放大电路, Rf是反馈电阻 有的电路还会在反馈电阻上并联一个小电容,一般在几pF到几十pF。 那么这个电容有什么作用呢?其实这个电容是一个相位补偿电容,防止运放自激振荡的。另外这个电容也有抑制高频噪声的作用。 运放负反馈电路产生自激振荡的幅值条件是,环路放大倍数倍数|AF|>1, 相位条件是放大路径和反馈路径的相位和等于(2n+1)Π 这个振荡条件的本质就是

第七周项目 2 简单计算问题体验(并联电阻,圆柱体表面积)
/**Copyright (c) 2014, 烟台大学计算机学院*All rights reserved.*文件名称 :main.cpp*作 者 :韩娟*完成日期 :2014年10月11日*版 本 号 :v1.0**问题描述 :输入两个电阻r1,r2的阻值,计算并输出他们并联后的阻值*输入描述 :两个浮点数,代表两个电阻阻值*程序输出 :一个浮点数,代表并联电阻的阻值*

两个led并联和一个电阻串联两个灯不能同时亮问题
两个led并联在和一个电阻串联,出现两个led不同时亮时只能红色的led可以量,两个led可以单独亮。 连接方法如下。 原因分析: 由于两个led一个是红色一个是蓝色,怀疑是参数不一致导致的。查看两个led数据手册Vf导通电压,如下图所示: 蓝色led正向导通压降 红色led正向导通压降 之后又拿万用表二极管档测量二极管正向导通压降

Simulink|双机并联自适应虚拟阻抗下垂控制仿真模型
目录 主要内容 模型研究 结果一览 下载链接 主要内容 风电高渗透率下,电力系统对风电场频率调节能力提出了技术要求。考虑风机惯性控制和变桨距控制的频率响应能力,提出将储能与风电自身调频手段相结合,参与系统频率调节。模型采用Simulink进行仿真,建立了风储联合调频下电力系统的频率特性模型,采用四机两区系统,利用频域模型法,附加

模拟电路仿真LTspice(随笔):收音机调谐LC并联特性曲线讲解
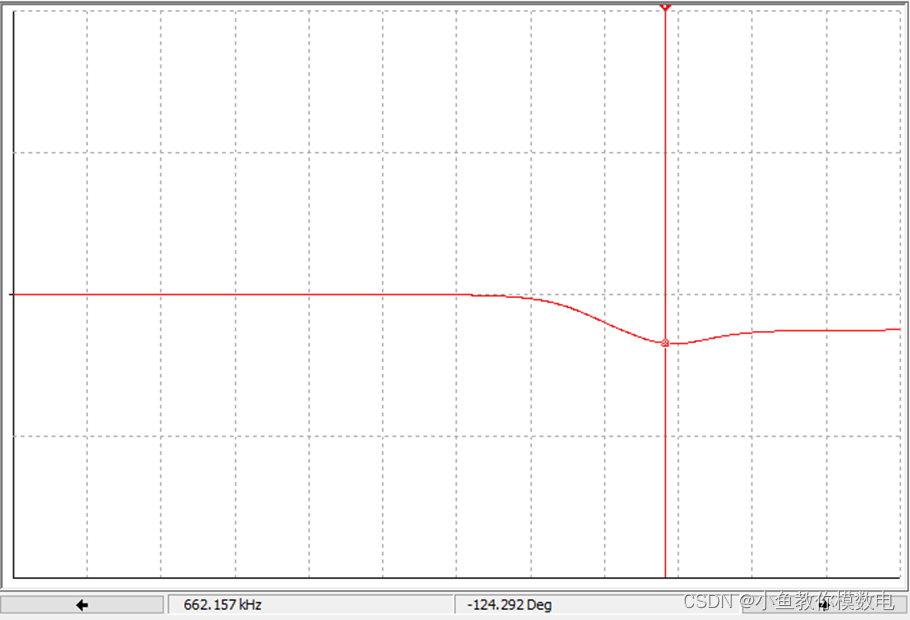
最早的收音机元件是很少的——一根天线、一个矿石检波器、一个耳机、一根地线。 那么天线接收那么多频率,如何选择其中想要的频率呢,即某个电台或广播的AM(调幅)信号。常用LC并联组成调谐电路,首先来看看其LC并联特性曲线。其谐振频率: 图1 LC并联曲线 仿真结果: 图2 LC并联幅频和相频曲线 可以将LC并联曲线理解为带通滤波器,只有接近谐振频率才有输出,否则就会被LC并联
【xr806开发板试用】XR806联调stm32控制并联四足马术机器人单腿运动学逆解与整体步态规划
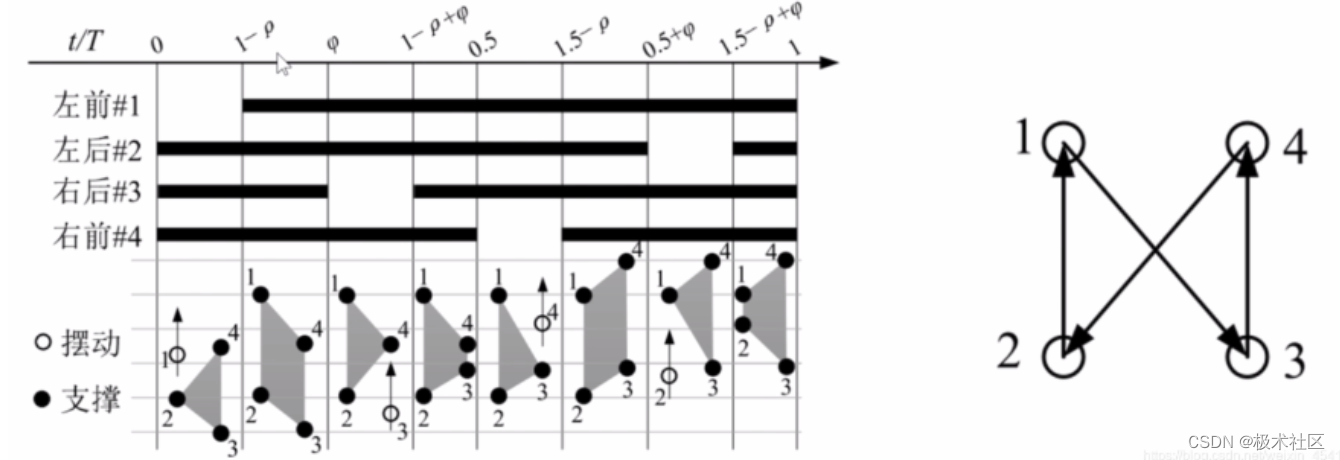
一、项目介绍 使用RX806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划。 实物图 二、涉及相关算法 1.单腿运动学逆解 控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动 %摆线方程(matlab

为什么与 MOSFET 栅极并联的 ZENER 二极管可能会引发振荡,要将其连接到栅极串阻的外侧???
在MOSFET驱动电路中,并联在栅极上的齐纳二极管(Zener diode)通常用来限制栅极电压,防止过压损坏MOSFET。然而,如果齐纳二极管直接并联在栅极上,而没有串联一个电阻,这可能会导致电路中产生振荡。对电路主要影响有以下几点: 寄生电容和电感:MOSFET的栅极具有寄生电容,而电路板布线、元件引脚和齐纳二极管本身也会引入寄生电感。当齐纳二极管直接

AMEYA360:思瑞浦发布全新并联基准芯片—:TPR43x系列产品
聚焦高性能模拟芯片和嵌入式处理器的半导体公司——思瑞浦(3PEAK, 股票代码:688536)推出全新并联基准芯片TPR433/TPR434。 TPR433/TPR434基于BCD工艺,电压精度0.5%@25°C,可广泛应用于电源、照明、工业设备等领域。 TPR433/434产品特性 *通过外部电阻可调的输出范围:VREF to 36V *VREF典型值:2.495V
不同型号的二极管模块并联_为什么电源模块不能并联使用?
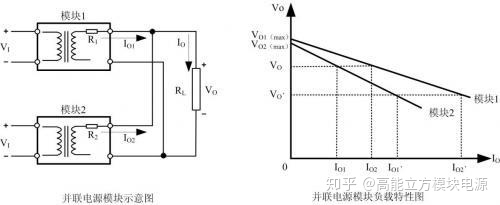
在大功率应用场合,往往单个电源模块不能满足要求,通常需要并联使用。但是,很多电源模块均不可以并联使用,若处理不好会导致整个系统的失效。下面分析下为什么电源模块不能并联使用。 下图为电源模块的内部等效与输出负载特性曲线:VO=f(IO),R为模块的输出阻抗(包含导线电阻和接触电阻等),空载时,模块输出电压为最大值VO(max)。当负载电流变化△IO时,负载电压变化量为△VO,△VO=R*△IO,R
大厂技术实现 | 腾讯信息流推荐排序中的并联双塔CTR结构 @推荐与计算广告系列
💡 作者:韩信子@ShowMeAI,Joan@腾讯 📘 大厂解决方案系列教程:https://www.showmeai.tech/tutorials/50 📘 本文地址:https://www.showmeai.tech/article-detail/64 📢 声明:版权所有,转载请联系平台与作者并注明出处 📢 收藏 ShowMeAI 查看更多精彩内容 一图读懂全文

【电路笔记】-串联和并联电阻
串联和并联电阻 文章目录 串联和并联电阻1、概述2、串联和并联电阻示例13、串联和并联电阻示例2 电阻器可以无限数量的串联和并联组合连接在一起,形成复杂的电阻电路。 1、概述 在之前的教程中,我们学习了如何将各个电阻器连接在一起以形成串联电阻器网络或并联电阻器网络,并且我们使用欧姆定律来查找每个电阻器组合上的各种电流和电压。 但我们也可以将电阻串联和并联组合在一起。 如

【电路笔记】-并联RLC电路分析
并联RLC电路分析 文章目录 并联RLC电路分析1、概述2、AC的行为3、替代配置3.1 带阻滤波器3.2 带通滤波器 4、总结 电子器件三个基本元件的串联行为已在我们之前的文章系列 RLC 电路分析中详细介绍。 在本文中,介绍了另一种称为并联 RLC 电路的关联。 在第一部分中,我们介绍基本的并联 RLC 电路并重点关注其阻抗。 第二部分重点介绍并联 RLC 电路的交流


多节电池串、并联转换电路设计
在做一个电源电路设计,最初目的是想放电时使用高电压,充电时使用低压。(充电时不用拆电池,使用手机充电器即可进行充电)。于是找到了以下思路 在充电时使之并联,放电时使之串联。 我具体的应用是:3节18650锂电池,使用一个1开4联开关。充电时把开关拨到上面使用并联,用TP4056降压充电芯片,使用一般的手机充电器即可充电。充满电压为4.2V。 放电时把开关拨到下面使用串联,这样我放电电压能有3
RL串联等效转换为RL并联的方法及其仿真
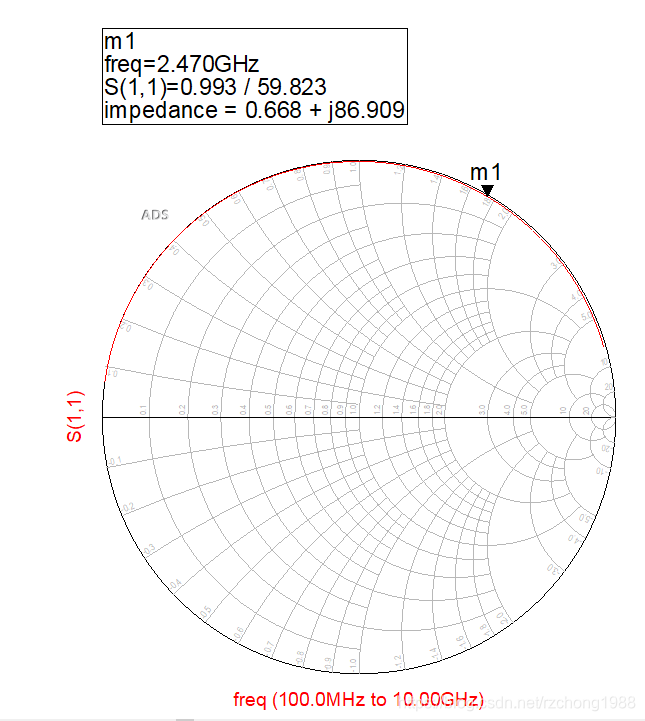
RL串联等效转换为RL并联的理论知识如下: 1)我们根据村田官网上的资料,使用LQW18AN5N6D10(5.6nH)电感来模拟仿真; 根据村田资料,我们可以知道该电感的Q值在2470MHz为130.4 ; 2)根据该资料,我们使用ADS模拟一个RL串联的电感如下: 其等效串联电阻的值为 , 使用 s参数仿真,可知其阻抗为:0.667+j*86.909 ;

【ROS基础】视觉+机械手-delta并联机械手
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉 📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处 文章目录 一、简介1.1串联机构1.2并联机构1.3Delta并联机械手二、优点
基于下垂控制的孤岛双机并联逆变器环流抑制模型(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 2.1 模型主体 2.2 环流抑制部分算法 2.3 两台逆变器输出的零序电流 🎉3 参考文献 🌈4 Simulink仿真实现 💥1